





Dławiki trybu wspólnego – od zasady działania do ważnych parametrów
Szum jest klasyfikowany jako wspólny (Common Mode) lub różnicowy, w zależności od tego, jak jest przewodzony. Jeśli nie zidentyfikujemy prawidłowo typu szumu (w literaturze angielskojęzycznej często jest stosowane określenie Mode, czyli Tryb, które – bezkrytycznie zostało skalkowane do literatury polskiej i niestety przyjęło się w niej, podobnie zresztą jak wiele innych terminów niekoniecznie związanych z techniką), ryzykujemy pogorszeniem bilansu szumu poprzez dodanie do obwodu nieodpowiednich komponentów tłumiących. W dalszej części zajmiemy się rozwiązaniem eliminacji szumu wspólnego – dławikiem trybu wspólnego (Common-Mode Chore – CMC), który tłumi sygnały wspólne, jednocześnie umożliwiając przechodzenie sygnałów różnicowych bez tłumienia.
Układy CMC są przydatne m.in. w szybkich, różnicowych interfejsach cyfrowych, takich jak USB, HDMI i Ethernet oraz w innych zastosowaniach związanych z różnicową transmisją danych. Są one również używane do filtrowania szumów linii zasilających w zasilaczach impulsowych i prostownikach AC/DC. Na rys. 1 zostały przedstawione dwa różne zastosowania układów CMC.
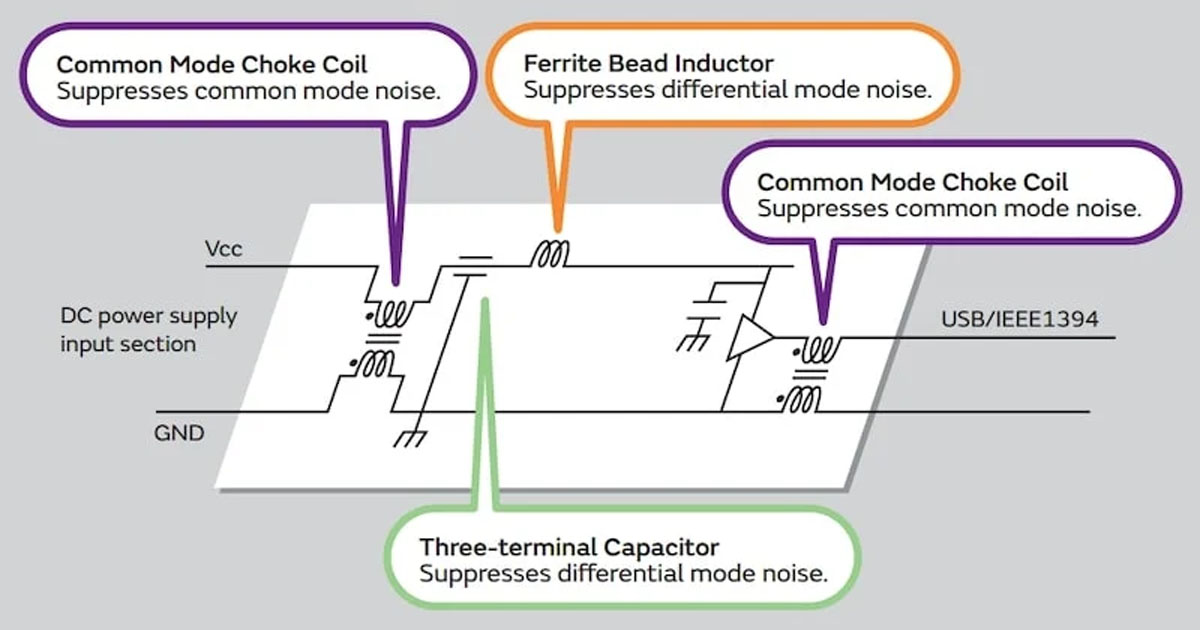
Rys. 1. Zastosowania CMC w filtrowaniu linii zasilających i sygnałowych (źródło: Murata)
Jak działa dławik CMC?
Dławik trybu wspólnego składa się z dwóch uzwojeń nawiniętych wokół rdzenia magnetycznego. Na rys. 2 przedstawiono dławik CMC do filtrowania linii zasilającej.
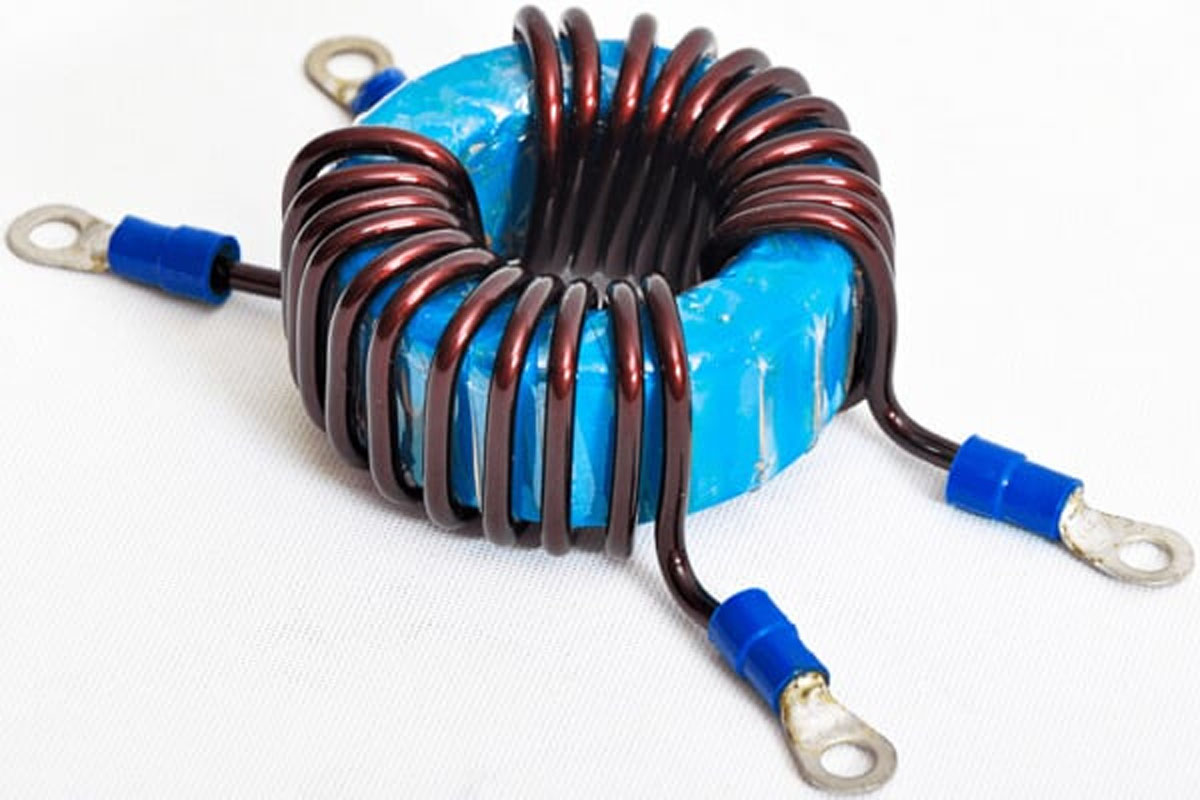
Rys. 2. Dławik CMC do zastosowań energetycznych (źródło: Octopart)
Kluczową rolę w działaniu CMC odgrywają kierunki uzwojeń względem siebie. Są one tak dobrane, aby urządzenie wykazywało wysoką impedancję dla sygnałów w trybie wspólnym, jednocześnie przepuszczając sygnały różnicowe w dużej mierze bez zmian.
Działanie CMC możemy zrozumieć, korzystając z prawa Faradaya i reguły prawej ręki. Rozważmy prądy płynące w układzie z rys. 3. Do wejścia dławika został tu doprowadzony sygnał różnicowy.
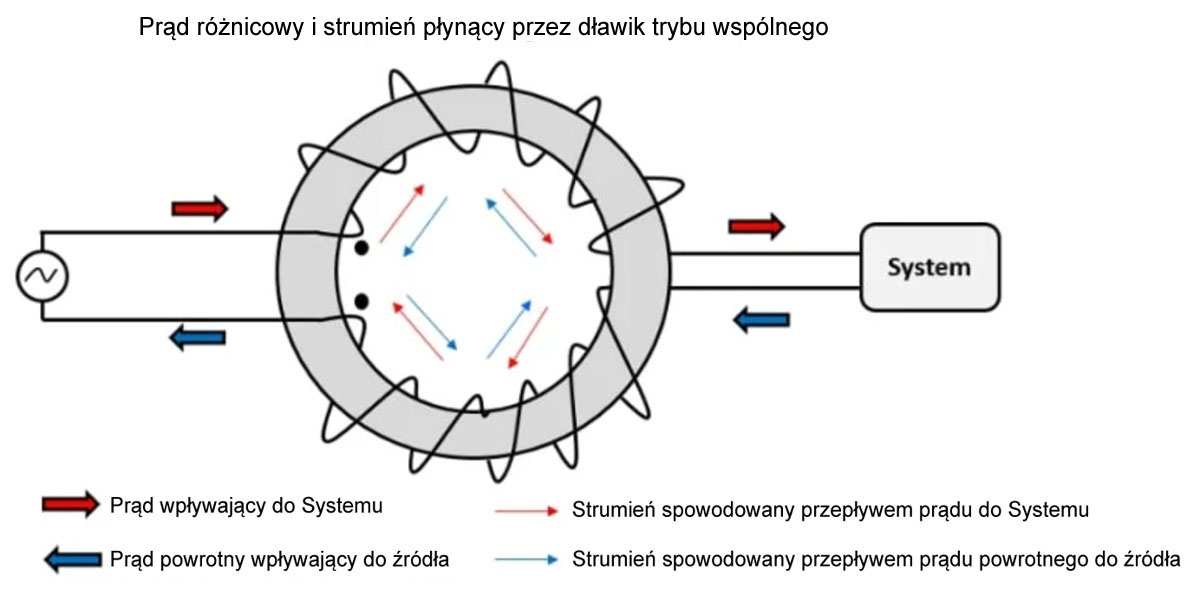
Rys. 3. CMC wzbudzany sygnałem różnicowym (źródło: Pulse Electronics)
W przypadku sygnału różnicowego dwa uzwojenia wytwarzają strumienie magnetyczne o równej wielkości, ale przeciwnych kierunkach. Ponieważ strumienie magnetyczne wzajemnie się znoszą, filtr powinien mieć znikomy wpływ na sygnał, umożliwiając jego przejście przy minimalnym tłumieniu. Ze względu na znoszenie się strumienia, sygnał różnicowy nie może doprowadzić rdzenia CMC do nasycenia.
Przypadek pokazany na rys. 4 objaśnia, jak CMC reaguje na sygnał wspólny.
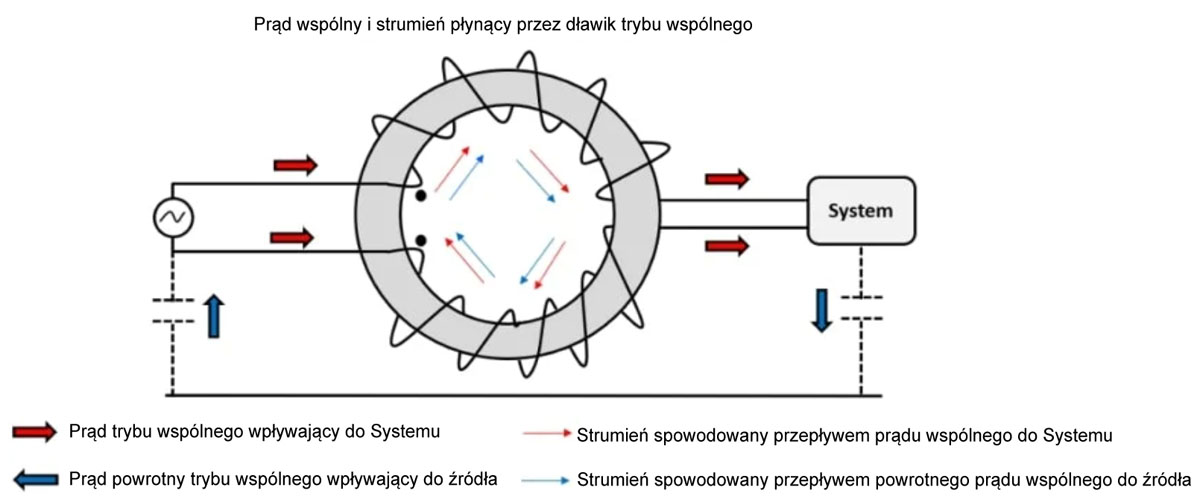
Rys. 4. CMC wzbudzony sygnałem wspólnym (źródło: Pulse Electronics)
W przypadku sygnału w trybie wspólnym strumienie magnetyczne z dwóch uzwojeń są skierowane w tym samym kierunku, tworząc dużą impedancję indukcyjną. Prezentując wysoką impedancję, urządzenie skutecznie tłumi w liniach szum wspólny o wysokiej częstotliwości.
Obliczanie impedancji różnicowej i impedancji w trybie wspólnym
Aby określić ilościowo powyższy opis jakościowy, obliczmy impedancję różnicową CMC i impedancję w trybie wspólnym. Na rys. 5 widzimy układ składający się z dwóch sprzężonych cewek indukcyjnych. Jest to najprostszy model układu, jakiego możemy użyć. W celu obliczenia impedancji różnicowej stosujemy sygnał różnicowy i podłączamy wyjścia do masy.
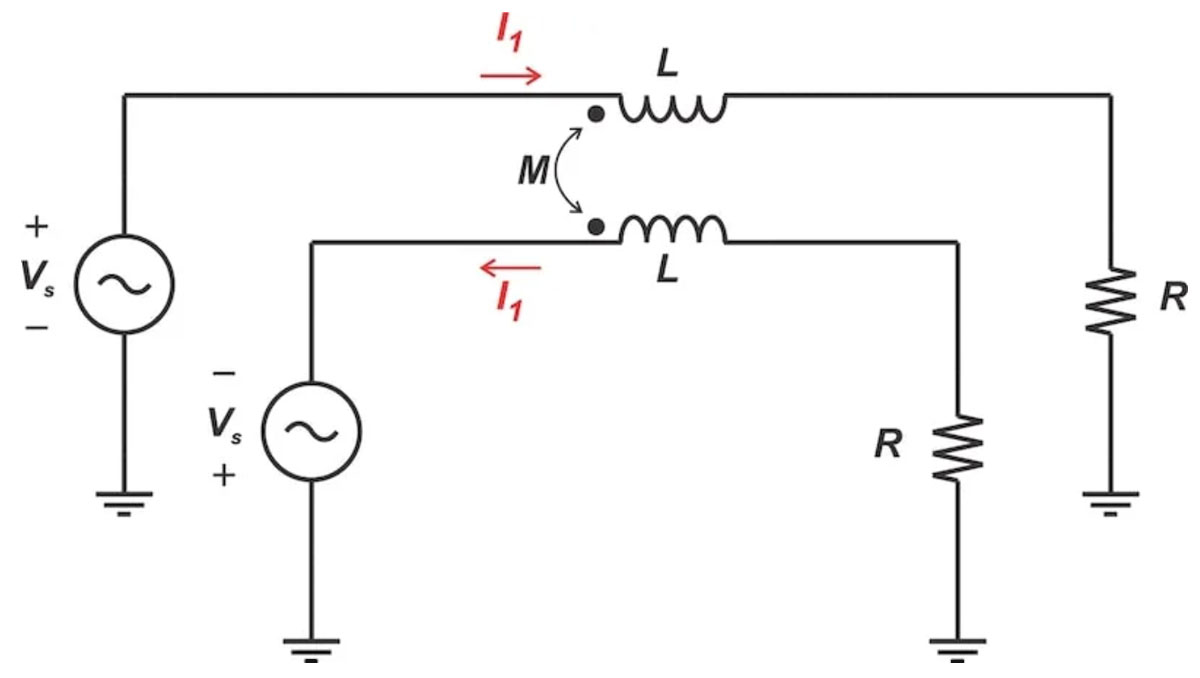
Rys. 5. Prosty model obwodu CMC do obliczania impedancji różnicowej (Steve Arara)
W powyższym modelu, R reprezentuje straty miedzi w uzwojeniach. Impedancja każdego uzwojenia wynosi:
gdzie zakłada się, że między uzwojeniami występuje maksymalne sprzężenie (L1 = L2 = M). Oznacza to, że filtr idealnie prezentuje małą impedancje dla sygnału różnicowego. Jak omówimy w dalszej części artykułu, impedancja ta powinna być jak najmniejsza.
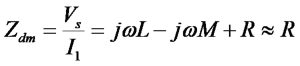
Rys. 6. Uproszczony model CMC do obliczania impedancji w trybie wspólnym (Steve Arara)
W tym przypadku impedancja każdego uzwojenia wynosi:

gdzie L⍵≫R. Impedancja wejściowa w trybie wspólnym jest zatem bardzo wysoka, szczególnie przy częstotliwościach, w których występuje silne sprzężenie między dwoma uzwojeniami. Jeśli CMC wykorzystuje rdzeń magnetyczny, sprzężenie – a co za tym idzie, impedancja w trybie wspólnym – będzie wyższa przy niższych częstotliwościach, gdzie rdzeń jest bardziej skuteczny w zwiększaniu indukcyjności.
Co by było, gdybyśmy użyli dwóch niesprzężonych cewek indukcyjnych?
Chociaż moglibyśmy użyć niesprzężonych cewek indukcyjnych do tłumienia szumów zarówno różnicowych, jak i wspólnych, CMC mają pewne istotne zalety w porównaniu z oddzielnymi cewkami indukcyjnymi. Na przykład, ze względu na znoszenia się strumieni podczas wzbudzania w trybie różnicowym, rdzeń CMC nie nasyca się podczas normalnej pracy. Dzieje się tak nawet wtedy, gdy przez obwód przepływa stosunkowo duży prąd. Dlatego też łatwiej jest używać CMC do tłumienia szumów na liniach o dużym przepływie prądu, takich jak linie zasilania AC/DC.
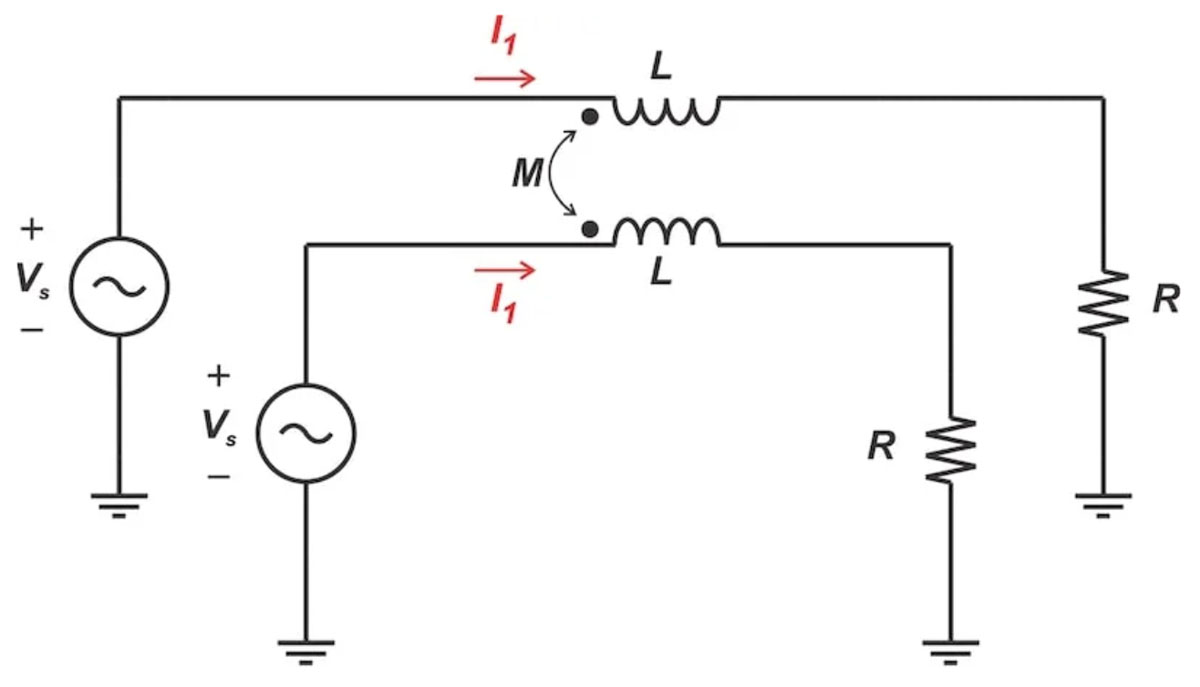
W przypadku szybkich interfejsów cyfrowych zaletą jest również fakt, że CMC są niewidoczne dla sygnałów różnicowych. Na rys. 7 zilustrowano różnicę między stosowaniem niesprzężonych i sprzężonych cewek indukcyjnych do filtrowania szumów z sygnału różnicowego.
Rys. 7. Sygnał różnicowy przed i po filtrowaniu za pomocą niesprzężonych cewek indukcyjnych (a) i CMC (b) (źródło: Murata)
Na rys. 7a zastosowano dwie oddzielne cewki indukcyjne. Efekt filtrowania wygładza krawędzie i zniekształca sygnał. Wydłużenie czasu narastania może być szkodliwe dla integralności sygnału i prowadzić do zakłóceń międzysymbolowych. Natomiast idealny CMC pokazany na rys. 7b w ogóle nie spowalnia zboczy.
Zmiana impedancji w zależności od częstotliwości
Na rys. 5 i 6 użyliśmy dwóch sprzężonych cewek indukcyjnych do modelowania CMC. Tak uproszczony model obwodu ignoruje pasożytnicze pojemności uzwojeń. Bardziej rozbudowany model uwzględniający pojemności wewnątrz uzwojenia jest przedstawiony na rys. 8.
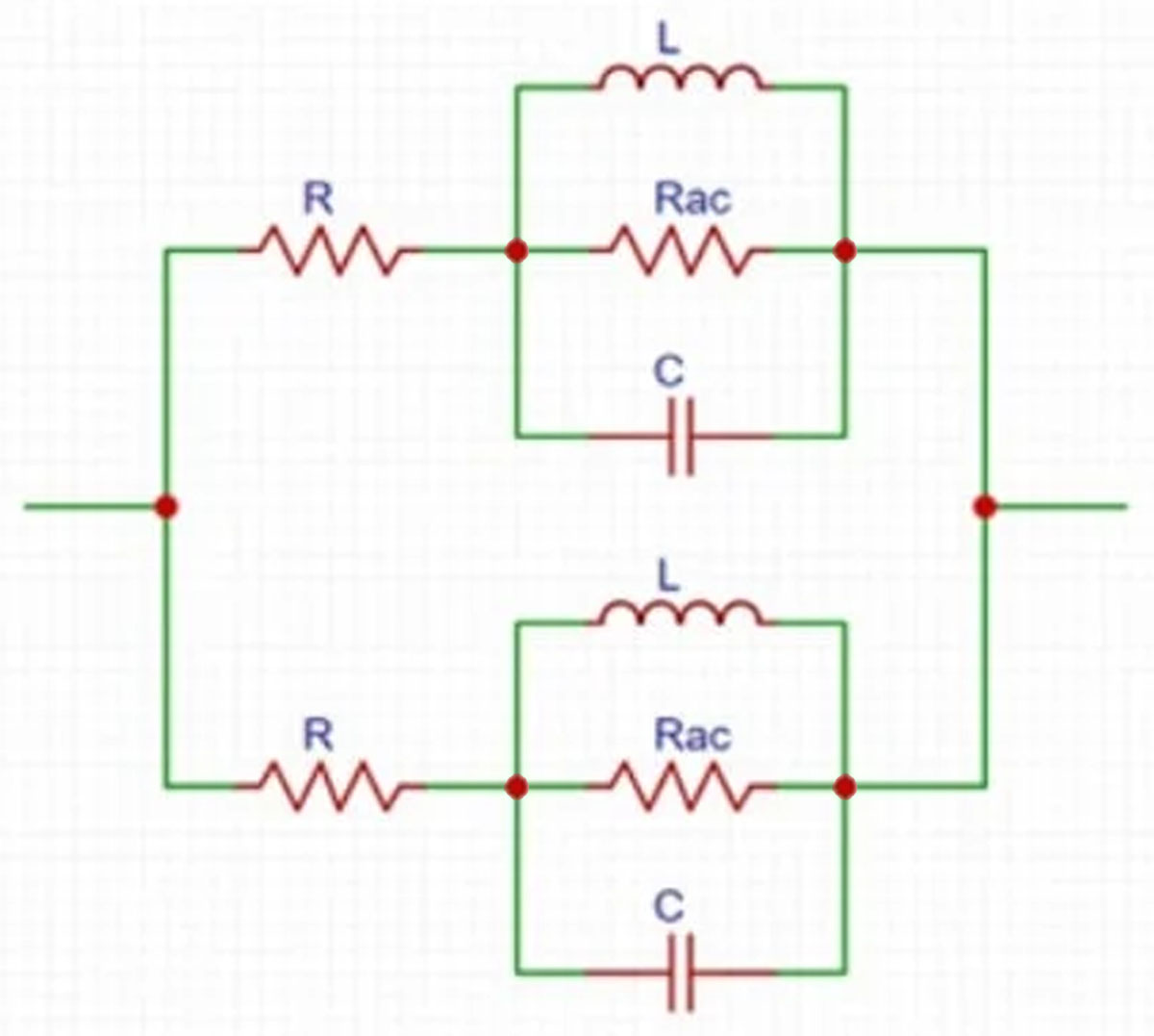
Rys. 8. Model obwodu zastępczego CMC dla wzbudzenia w trybie wspólnym (źródło: Abracon)
Pojemność uzwojenia odgrywa kluczową rolę w odpowiedzi częstotliwościowej CMC. Równoległy obwód RLC w środku modelu równoważnego oznacza, że istnieje częstotliwość rezonansowa, przy której równoległy obwód LC zachowuje się jak obwód otwarty. Przy tej częstotliwości impedancja równoległego obwodu RLC osiąga maksimum i jest równa Rac.
Poniżej częstotliwości rezonansowej obwód ma charakter indukcyjny. Jednak gdy przechodzimy do częstotliwości powyżej częstotliwości rezonansowej, zachowanie obwodu staje się pojemnościowe. Na rys. 9 pokazano zmiany impedancji kilku różnych CMC firmy Pulse Electronics w funkcji częstotliwości.
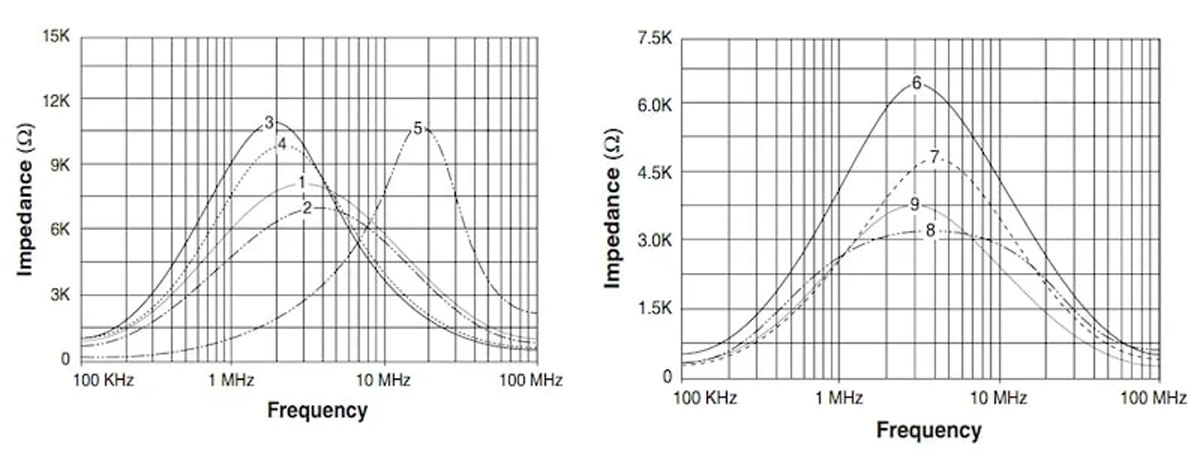
Rys. 9. Impedancja w trybie wspólnym kilku dławików CMC (źródło: Pulse Electronics)
Jeśli producent nie dostarcza modelu CMC, do oszacowania parametrów modelu z rys. 8 możemy użyć pomiarów laboratoryjnych. Model ten można następnie zastosować do symulacji wpływu CMC na szum w trybie wspólnym.
Wybór dławika trybu wspólnego
Wybierając dławik w trybie wspólnym, należy wziąć pod uwagę zarówno jego impedancję w trybie wspólnym, jak i impedancję w trybie różnicowym. Impedancja różnicowa powinna być jak najniższa, aby pożądany sygnał mógł przejść bez zakłóceń. Zdolność filtra do tłumienia szumów zależy bezpośrednio od jego impedancji w trybie wspólnym, im wyższa impedancja w trybie wspólnym, tym lepsze tłumienie szumów.
Musimy również wziąć pod uwagę, jak impedancja w trybie wspólnym zmienia się wraz z częstotliwością. Pozwoli to upewnić się, że jest ona akceptowalnie wysoka w interesującym nas zakresie częstotliwości. Należy pamiętać, że wyższa impedancja w trybie wspólnym zazwyczaj odpowiada większemu rozmiarowi dławika, co może stanowić pewien problem podczas projektowania PCB.
Na rys. 10 przedstawiono impedancję różnicową i impedancję w trybie wspólnym dwóch dławików CMC firmy Murata.
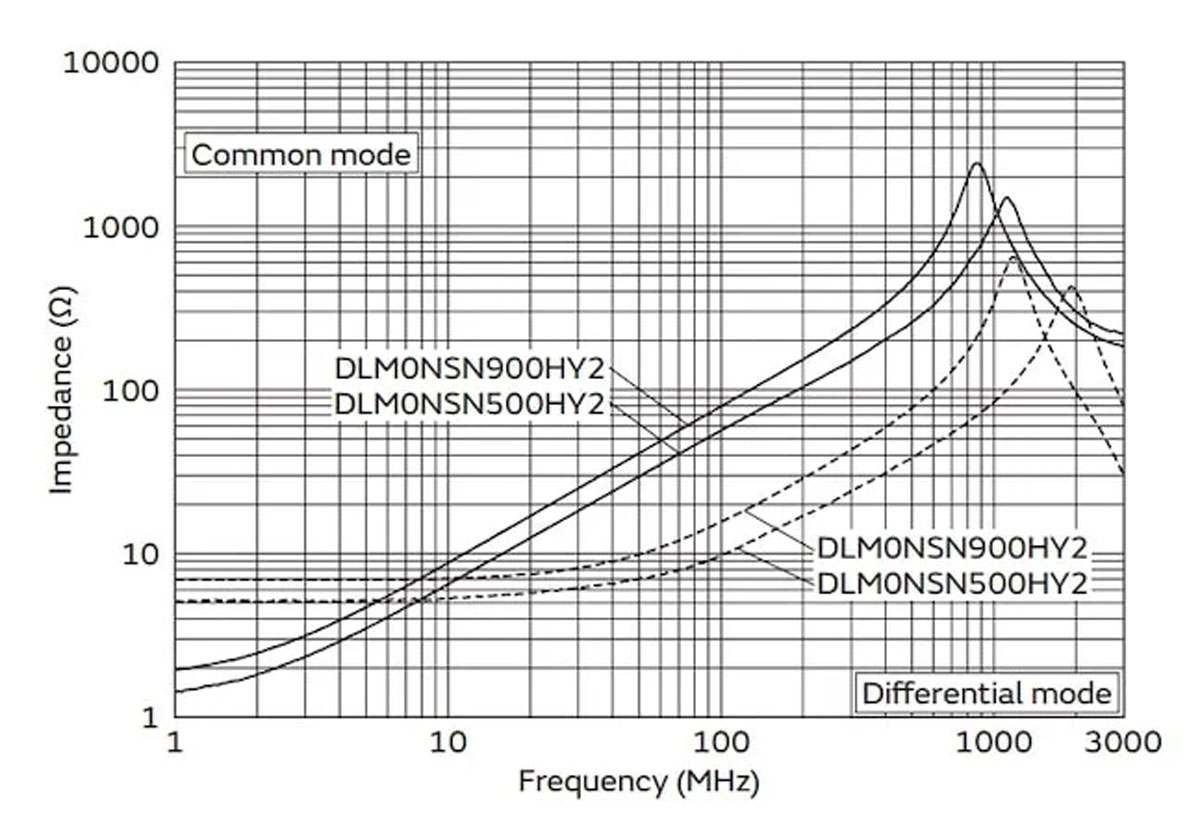
Rys. 10. Arkusze danych CMC przedstawiają impedancję różnicową i impedancję w trybie wspólnym w zależności od częstotliwości (źródło: Murata)
Na powyższym rysunku impedancja w trybie wspólnym dławika DLMNSN900HY2 jest większa niż 2 kΩ przy około 900 MHz. Jego impedancja różnicowa przy tej samej częstotliwości wynosi około 200 Ω. Impedancja w trybie wspólnym dławika DLM0NSN500HY2 osiąga wartość szczytową powyżej 1 kΩ przy około 1000 MHz, a jego impedancja różnicowa wynosi tylko około 100 Ω.
Niektóre arkusze danych przedstawiają również tłumienność wtrąceniową w trybie różnicowym w zależności od częstotliwości. Krzywe tłumienia wtrąceniowego dla powyższych urządzeń Murata pokazano na rys. 11.
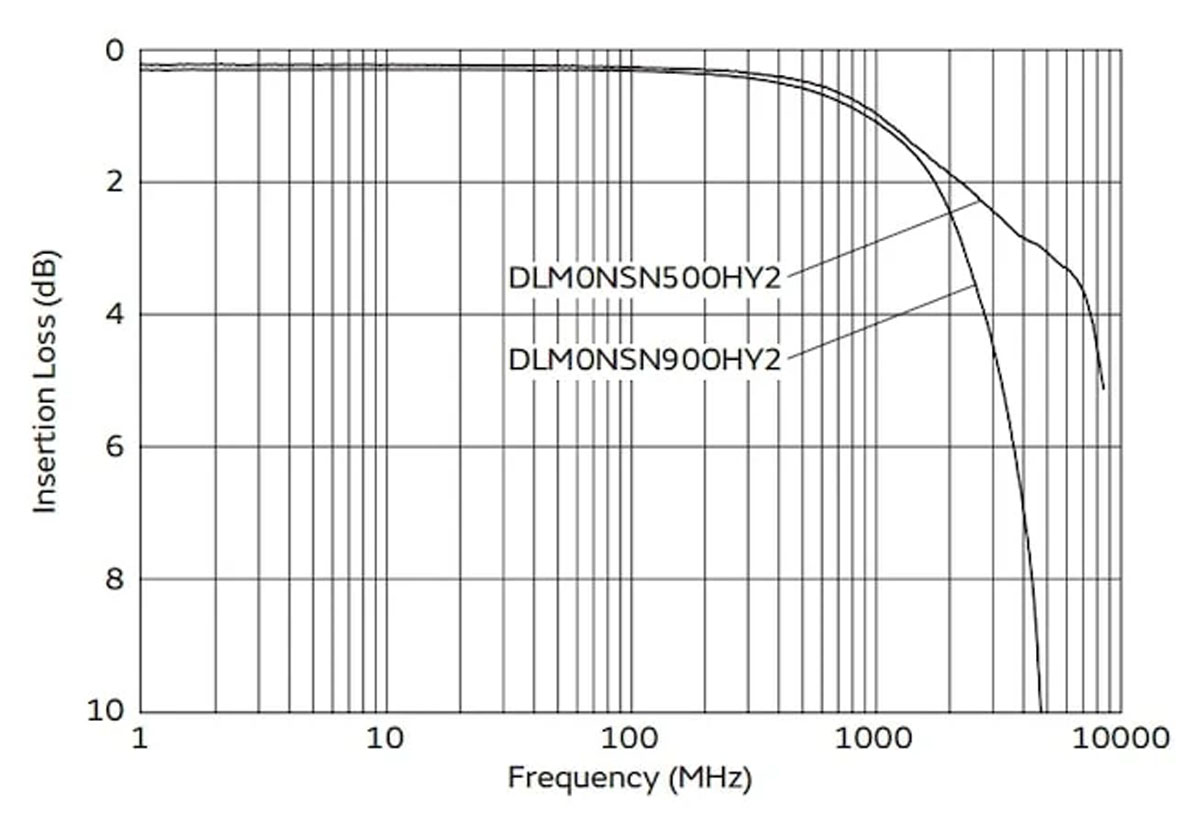
Rys. 11. Tłumienność wtrąceniowa dwóch układów CMC firmy Murata (źródło: Murata)
Dwie różne metody nawijania: Bifilarna i sekcyjna
Dławiki CMC mogą być nawijane uzwojeniami bifilarnymi lub sekcyjnymi. Obie metody zostały zilustrowane na rys. 12.

Rys. 12. Uzwojenia bifilarne (po lewej) i sekcyjne (po prawej) stosowane w przetwornicach CMC (źródło Würth Elektronik)
Ponieważ mają one niższą indukcyjność upływu i wykazują mniejsze tłumienie dla sygnałów różnicowych, elementy z uzwojeniem bifilarnym są powszechnie stosowane w aplikacjach z szybkimi sygnałami różnicowymi. CMC z uzwojeniem sekcyjnym mają większą separację między uzwojeniami, dzięki czemu są bardziej odpowiednie do wysokich napięć. Separacja ta prowadzi jednak do wyższej indukcyjności upływu i wyższej impedancji różnicowej.
Źródło: Dr. Steve Arar „Common-Mode Chokes: From Working Principles to Important Performance Parameters” – All abort circuits
 Zmiana technologii przyłączeniowej bez modyfikacji PCB? Konstrukcja TWIN w terminalach SPTH od Phoenix Contact
Zmiana technologii przyłączeniowej bez modyfikacji PCB? Konstrukcja TWIN w terminalach SPTH od Phoenix Contact  Nowość w ofercie firmy SCHURTER: superkondensatory – ultrakompaktowe i jednocześnie niezwykle wydajne
Nowość w ofercie firmy SCHURTER: superkondensatory – ultrakompaktowe i jednocześnie niezwykle wydajne  Dyrektywy ATEX a materiały wybuchowe – gdzie kończy się zakres przepisów?
Dyrektywy ATEX a materiały wybuchowe – gdzie kończy się zakres przepisów? 

![O konkursie organizowanym przez firmę TRUMPF Huettinger i polskie uczelnie techniczne opowiada Alicja Peresada i prof. Jacek Rąbkowski oraz kilkoro nagrodzonych dyplomantów: mgr inż. Jakub Dobosz, inż. Maja Zielińska, dr inż. Jakub Kołodziej, dr inż Weronika Hryniewska-Guzik i dr inż. Grzegorz Bartyzel. Zapraszamy do obejrzenia filmu! [materiał redakcyjny]](https://mikrokontroler.pl/wp-content/uploads/2026/07/TRUMPF-czolowka.png "https://www.youtube.com/watch?v=XkeyLmtLfxo")



