Bootloader dla zestawu FREEboard – wprowadzenie
| W artykule przedstawiamy szczegółowy opis konfiguracji bibliotek tworzących opisany w artykule bootloader dla płytki FREEboard. Konfiguracja umożliwia zoptymalizowanie cech i parametrów bootloadera do wymogów aplikacji. Osoby zainteresowane korzystaniem z podstawowej możliwości bootloadera – programowania pamięci Flash mikrokontrolera – nie muszą poznawać tajników jego konfiguracji i kompilacji programu wynikowego, zachęcamy ich przeczytania artykułu poświęconego korzystaniu z bootloadera KBOOT dla zestawu FREEboard. |
KINETIS Bootloader jest narzędziem programowym, przechowywanym w pamięci Flash mikrokontrolera z rodziny KINETIS firmy Freescale, wykorzystywanym do aktualizacji oprogramowania aplikacji, znajdującego się zazwyczaj w tej samej pamięci, przy pomocy jednego z dostępnych połączeń szeregowych (UART, I2C, SPI, USB…). Narzędzie umożliwia szybkie i łatwe programowanie układu w trakcie pełnego cyklu życiowego urządzenia, poczynając od fazy projektowej, poprzez fazę produkcji i kończąc na etapie pracy urządzenia w środowisku docelowym.
Z oficjalnej strony internetowej producenta Freescale można pobrać pakiet zawierający kody źródłowe omawianego bootloadera, który jest w wysokim stopniu konfigurowalny za sprawą przemyślanej struktury projektu – rysunek 1. Dodatkowo oprócz dokumentacji są tam również zawarte aplikacje dla systemów komputerowych, ułatwiające pracę z bootloaderem (narzędzia wiersza poleceń oraz aplikacje graficzne).
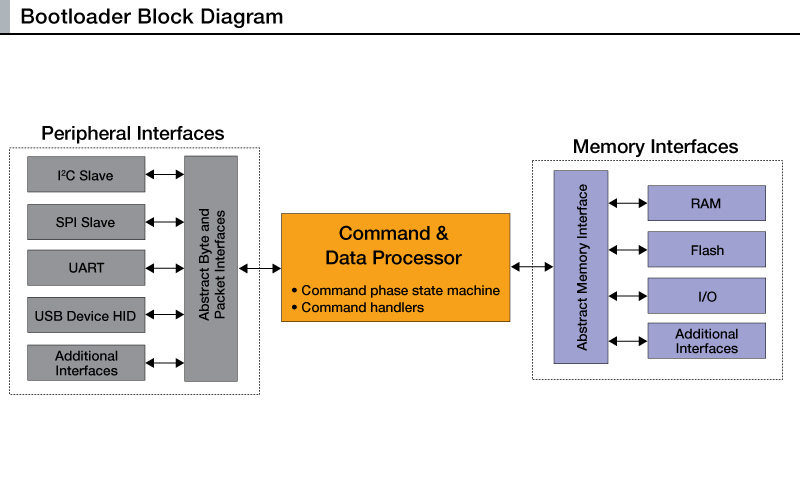
Rys. 1. Struktura bootloadera dla mikrokontrolerów KINETIS, udostępnionego przez firmę Freescale
Co aktualnie oferuje Freescale?
W chwili przygotowania artykułu (grudzień 2014) KINETIS Bootloader w wersji 1.1.0 obsługuje mikrokontrolery z serii K22F, K64F oraz KL25Z (przy odrobinie pracy można samemu przygotować obsługę innego mikrokontrolera rodziny KINETIS). Z zadeklarowanych przez producenta charakterystyk bootloadera warto wymienić najważniejsze:
- łatwa implementacja w dowolnym mikrokontrolerze z rodziny KINETIS,
- możliwość komunikacji z hostem poprzez magistrale UART, USB HID, I2C oraz SPI, a także potencjalnie realizowalna komunikacja z wykorzystaniem magistrali CAN,
- uniwersalny protokół bootloadera, niezależny od aktualnie wykorzystywanej magistrali,
- opcje zabezpieczenia pamięci Flash,
- detekcja aktywnej magistrali (aktywnego peryferium),
- narzędzia ułatwiające pracę hosta z bootloaderem,
- kody źródłowe udostępniane zgodnie z licencją BSD Open Source.
Organizacja przestrzeni w pamięci i działanie bootloadera
W pamięci Flash mikrokontrolera z zaimplementowanym narzędziem KINETIS Bootloader można wyróżnić dwa główne obszary (rysunek 1):
- obszar bootloadera – znajduje się pod adresem 0x0 i zawiera tablicę wektorów bootloadera wraz z jego kodem. Domyślnie dla układów serii KL25Z pod obszar bootloadera zarezerwowanych jest 32 kB pamięci Flash (można to zmienić w projekcie bootloadera).
- obszar aplikacji użytkownika – rozpoczyna się od adresu zdefiniowanego w stałej BL_APP_VECTOR_TABLE_ADDRESS (domyślnie dla układów KL25Z jest to adres 0x8000). Oprócz tablicy wektorów aplikacji użytkownika oraz właściwego oprogramowania w obszarze tym występuje jeszcze sekcja konfiguracji bootloadera (Bootloader Configuration Area, BCA) przesunięta o adres 0x3C0 względem początku danego obszaru (rysunek 2).
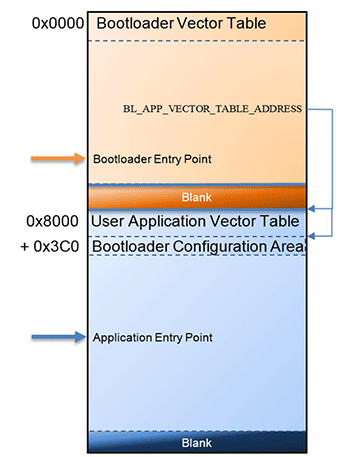
Rys. 2. Organizacja przestrzeni w pamięci Flash mikrokontrolera z funkcją KINETIS Bootloader [1]
Podczas inicjalizacji bootloadera czytane jest pierwsze 4-bajtowe pole sekcji BCA i w sytuacji, gdy jest w nim zawarty ciąg 'kcfg’ to automatycznie odczytywane są pozostałe pola tej sekcji. Po zebraniu wszystkich danych z sekcji BCA bootloader skonfiguruje sygnały zegarowe oraz wszystkie peryferia, które mają być aktywnie wykorzystywane w czasie jego działania. Natomiast w trakcie pracy bootloadera sprawdzana jest zawartość dwóch 32-bitowych pól: stackPointer (pod adresem BL_APP_VECTOR_TABLE_ADDRESS) przechowujące wskaźnik na stos aplikacji oraz entryPoint (pod adresem BL_APP_VECTOR_TABLE_ADDRESS+4) przechowujące adres startu aplikacji. Jeżeli w tych polach jest zapisana wartość 0xFF to bootloader kontynuuje swoje działanie w trybie poleceń. W pozostałych przypadkach zakończy on swoją pracę po czasie określonym w [ms] w 16-bitowym polu peripheralDetectionTimeoutMs sekcji BCA i kontrolę nad układem przejmie aplikacja użytkownika. Takie rozwiązanie pozwala na skomunikowanie się z bootloaderem w czasie od podania zasilania dla układu do uruchomienia docelowej aplikacji.
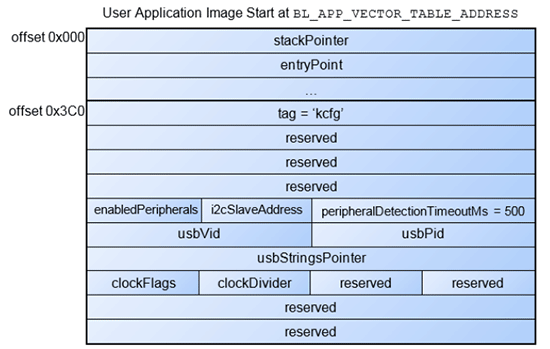
Rys. 3. Tablica wektorów w obszarze aplikacji użytkownika wraz z sekcją BCA [1]
Konfiguracja bootloadera
Pakiet Freescale KINETIS Bootloader Package dostępny na stronie [2] zawiera przykładowy projekt, przygotowany w środowisku IAR Embedded Workbench, w którym występują pliki konfiguracyjne dotyczące zarówno pracy i funkcjonalności bootloadera jak również wykorzystywanych przez niego zasobów sprzętowych dostępnych w konkretnym układzie (pliki te są umieszczone w podkatalogu targets/<seria_mikrokontrolera>/src):
- bootloader_config.h – makra konfiguracyjne wykorzystywane przy kompilacji projektu,
- clock_config_x.c – funkcje konfigurujące sygnały zegarowe,
- hardware_init_x.c – funkcje konfigurujące wyprowadzenia i najważniejsze elementy systemu, operujące bezpośrednio na rejestrach mikrokontrolera,
- memory_map_x.c – mapa pamięci mikrokontrolera, czyli sposób przydziału przestrzeni adresowej poszczególnym składowym mikrokontrolera (pamięć Flash, pamięć SRAM, itd.),
- peripherals_x.c – tablica deskryptorów układów peryferyjnych.
Makra konfiguracyjne umożliwiają w prosty sposób dostrojenie funkcjonalności bootloadera:
- BL_DEFAULT_PERIPHERAL_DETECT_TIMEOUT określa maksymalny domyślny czas w [ms] detekcji aktywnego układu peryferyjnego (czyli wymieniającego dane z otoczeniem),
- BL_ENABLE_CRC_CHECK włącza (1) sprawdzanie sumy kontrolnej (aktualnie nie jest używane z powodu braku zaimplementowanej funkcji sprawdzającej),
- BL_FEATURE_READ_MEMORY aktywuje (1) obsługę komend odczytu pamięci Flash układu,
- BL_FLASH_VERIFY_DISABLE wyłącza (1) weryfikację operacji kasowania i zapisu pamięci Flash układu,
- BL_HAS_MASS_ERASE powinno być ustawione na wartość (1) w sytuacji, gdy polecenie ERSALLU jest obsługiwane przez wewnętrzny kontroler pamięci Flash (tylko w niektórych nowych układach),
- BL_MIN_PROFILE wybiera maksymalną (0) lub minimalną (1) konfigurację bootloadera, przy czym w tym drugim przypadku obsługiwana jest tylko część pełnego zbioru komend,
- BL_UART_AUTOBAUD_IRQ wymusza (1) wykorzystanie przerwań od zmiany stanu linii do celów autodetekcji prędkości transmisji na magistrali UART zamiast mechanizmu odpytywania (0).
 Czy potężny rozbłysk słoneczny zagraża Ziemi? [opinia eksperta IŁ]
Czy potężny rozbłysk słoneczny zagraża Ziemi? [opinia eksperta IŁ]  Świetlana przyszłość przemysłu elektronicznego według Dave Doherty, prezesa zarządu DigiKey
Świetlana przyszłość przemysłu elektronicznego według Dave Doherty, prezesa zarządu DigiKey 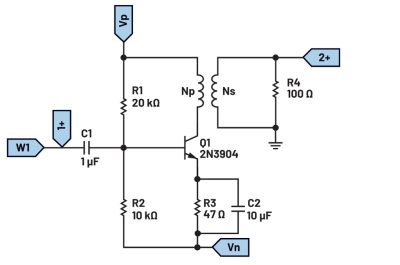 Zastosowanie zestawu ADALM2000 do pomiarów wzmacniacza sprzężonego transformatorowo
Zastosowanie zestawu ADALM2000 do pomiarów wzmacniacza sprzężonego transformatorowo