[PRZYKŁAD] Sterownik silników KAmodMPC17C724 i KAmduino UNO

W ofercie sklepu KAMAMI.pl pojawił się nowy moduł z serii KAmod – KAmodMPC17C724. Jest to sterownik silników DC z podwójnym mostkiem H z układem MPC17C724. Moduł pozwala na sterowanie dwoma silnikami szczotkowymi DC lub jednym bipolarnym silnikiem krokowym. Poniższy przykład ilustruje proste wykorzystanie sterownika. Przygotowany program przyspiesza obroty silnika do maksimum, następnie zwalnia do zera. Po zmianie kierunku ruchu sytuacja powtarza się.
W przykładzie wykorzystano następujące komponenty:
- KAmodMPC17C724 – moduł sterownika silników z podwójnym mostkiem H
- KAmduino UNO – płytka rozwojowa z mikrokontrolerem ATmega328P
- 2 Silniki z kołem – W projekcie wykorzystano części zestawu modCar
- Przewody żeńsko-męskie
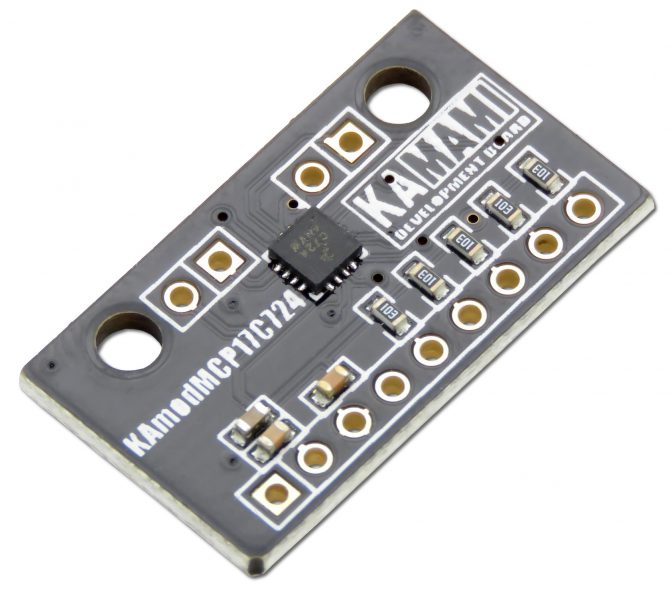
Rys.1. Moduł ze sterownikiem silników KAmodMPC17C724
Moduł KAmodMPC17C724 to podwójny mostek H zaimplementowany w układzie scalonym MPC17C724. Układ pozwala na sterowanie dwoma silnikami szczotkowymi DC lub jednym bipolarnym silnikiem krokowym. Sterownik pracuje przy napięciu z zakresu 2,7…5,5 V i może współpracować z silnikami o poborze prądu do 0,4 A.
Sterowanie sterownika jest proste. Pomiędzy piny +VIN a GND należy dołączyć odpowiednie zasilanie. Do pinów o1A i o1B lub/oraz o2A i o2B należy podłączyć silnik(i) DC. Ustawiając napięcia na pinach IN1A i IN1B lub/oraz IN2A i IN2B sterujemy napięciem na wejściu silników. Poniższa tabela wyjaśnia jaki wpływ na stany linii wyjściowych mają stany linii wejściowych:
| Linie wejściowe | Linie wyjściowe | |||
|---|---|---|---|---|
| PSAVE | IN1A/IN2A | IN1B/IN2B | O1A/O2A | O1B/O2B |
| L | L | L | L | L |
| L | H | L | H | L |
| L | L | H | L | H |
| L | H | H | Z | Z |
| H | X | X | Z | Z |
(oznaczenia: L- stan niski; H- stan wysoki; Z – stan wysokiej impedancji; X – bez znaczenia)
Dodatkowo należy zwrócić uwagę na linię PSAVE. Aby silniki mogły się poruszać pin musi być na potencjale masy. Na płytce są rezystory pull-up podciągające linię do napięcia zasilania, więc pin do masy należy podłączyć samodzielnie. Warto też zwrócić uwagę, że w takiej konfiguracji można sterować szybkością silnika za pomocą sygnału PWM na jednym pinie (np. IN1A/IN2A). Sygnały PWM warto wysyłać z pinów oferujących sprzętową obsługą tej modulacji (W płytce KAMduino UNO: 3, 5, 6, 9, 10, 11). Natomiast kierunek zmieniać poziomem na pinie drugim (np. IN1B/IN2B). Należy jednak zwrócić uwagę, że o ile w jednym kierunku im większe wypełnienie, tym wyższa prędkość o tyle w drugim im mniejsze wypełnienie sygnału PWM, tym większa prędkość.
Po wyjaśnieniu w jaki sposób sterować modułem, można przejść do połączenia układu demonstracyjnego. Na początku należy odpowiednio podłączyć sterownik do płytki KAmduino. Jeden ze sposobów pokazano w poniższej tabeli.
| Pin KAmduino UNO | Pin KAmodMPC17C724 |
| 5 V | +VIN |
| GND | GND |
| D2 | PSAVE |
| D3 | IN1A |
| D4 | IN1B |
| D5 | IN2A |
| D6 | IN2B |
Przewody silników zostały przylutowane do pinów OUT1 i OUT2 (czerwone przewody – piny A, czarne – piny B). Połączony układ prezentuje się następująco:
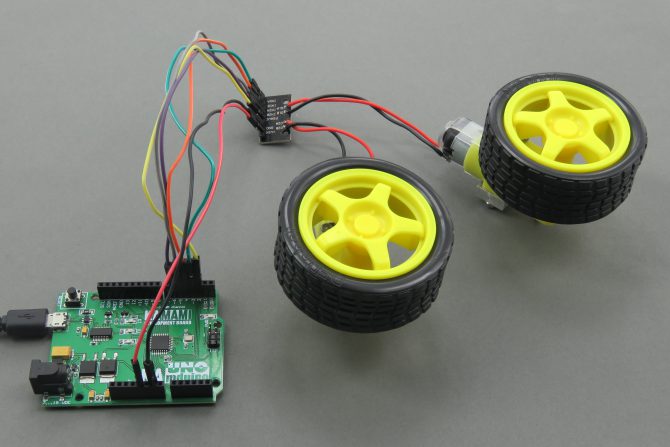
Rys. 2. Zmontowany układ
 Projekty inteligentnych sterowników przetwornic z tranzystorami GaN — część 2: konfiguracja i optymalizacja
Projekty inteligentnych sterowników przetwornic z tranzystorami GaN — część 2: konfiguracja i optymalizacja  PM-3133-CPS – inteligentny trójfazowy licznik energii z CANopen
PM-3133-CPS – inteligentny trójfazowy licznik energii z CANopen  Czujnik drgań STMicroelectronics z wbudowaną AI alternatywą dla czujników piezoelektrycznych do monitorowania urządzeń przemysłowych
Czujnik drgań STMicroelectronics z wbudowaną AI alternatywą dla czujników piezoelektrycznych do monitorowania urządzeń przemysłowych 


![Szymon Robak oprowadza po katowickim Laboratorium Badań Kompatybilności Elektromagnetycznej w Sieć Badawcza Łukasiewicz - Instytucie Sztucznej Inteligencji i Cyberbezpieczeństwa. Zapraszamy na film! [materiał redakcyjny]](https://mikrokontroler.pl/wp-content/uploads/2026/06/Szymon-Robak-tytulowe.png "https://www.youtube.com/watch?v=gHcP8AajoN4")
![Zapraszamy do obejrzenia filmu i wysłuchania krótkich wypowiedzi prelegentów Hardware Forum 2026 i organizatorów majowej konferencji dla inżynierów z branży elektronicznej: Konrad Bruliński z Lemontech, prof. Krzysztof Kulpa z Politechniki Warszawskiej, Zbigniew Huber z FLC, Ewa Załupska z firmy KROK, Jerzy Kozieł z MPTECH, Grzegorz Potyralski z VIGO Photonics, dr Krzysztof Czuba z Politechniki Warszawskiej, Anna Beata Kalisz Hedegaard z Quantum Security Defence, Adrian Cichosz z Elhurt Dystrybucja Anna Kamińska z Creotech Quantum, oraz Łukasz Jaeszke i Adam Jaeszke z TEK.day [materiał redakcyjny]](https://mikrokontroler.pl/wp-content/uploads/2026/05/tytulowe-film-1.png "https://www.youtube.com/watch?v=BgxJVTwYJ-s")