





Nowa wersja firmware dla GPS firmy u-blox
To „uczące się” rozwiązanie może być praktyczne w zastosowaniach M2M, w których urządzenia są wielokrotnie używane na konkretnych obszarach. Dobrymi przykładami są: flota taksówek w mieście oraz zestaw kontenerów i palet przemieszczanych między magazynami. W takich przypadkach unikatową bazę użytecznych danych można wygenerować szybko i usługa może wiarygodnie podawać położenie użytkownikowi.
Poniższa lista wyczerpuje możliwości połączenia danych pozycyjnych z sieci komórkowej i satelitów GPS (lokalizacji hybrydowej) dające efekty lepsze niż sama technologia GPS:
- jakość określania położenia może być poprawiona i rozszerzona na obszary, w których sygnały satelitów GPS są w 100% zablokowane, szczególnie wnętrza budynków.
- możliwe jest wyeliminowanie sytuacji, w których nie da się zupełnie ustalić położenia, poprzez podanie przynajmniej przybliżonej lokalizacji wszędzie tam, gdzie jest pokrycie sieci komórkowej.
- celowe zakłócanie sygnałów GPS można obejść, poprawiając skuteczność systemów antykradzieżowych.

Niższe zużycie energii
Zaimplementowany został nowy tryb oszczędzania energii, w którym pobór prądu jest mniejszy o ponad 35%. Tryb ten zapewnia automatyczne zarządzanie poborem energii, które daje najlepszy dla danego zastosowania kompromis między zużyciem energii a wydajnością. Funkcja ta pozwala na samodzielne, inteligentne odłączenie obwodów RF i/lub niskiej częstotliwości z możliwością automatycznego wybudzenia.
 Rys. 5. Przenośne urządzenia śledzące, takie jak te produkowane przez firmę LOSTnFOUND®, partnera u-blox, bazują na najniższym możliwym zużyciu energii, co przedłuża życie baterii.
Rys. 5. Przenośne urządzenia śledzące, takie jak te produkowane przez firmę LOSTnFOUND®, partnera u-blox, bazują na najniższym możliwym zużyciu energii, co przedłuża życie baterii.Pozwala to na zoptymalizowaną pracę w systemach, które są krytyczne jeśli chodzi o zapotrzebowanie na energię, np. niewielkie urządzenia elektroniki konsumenckiej trzymane w dłoni zasilane z małych baterii, które wymagają tylko okresowej łączności z systemem GPS. Na drugim biegunie są tu urządzenia zasilane z alternatora samochodu, które nie muszą być aż tak energooszczędne.
Zaawansowane samodzielne zliczanie nawigacyjne dla pojazdów
Należący do rodziny u-blox 6 moduł GPS LEA-6R jest wyposażona w funkcję Automotive Dead Reckoning (ADR). Ten mechanizm lokalizacji, opracowany przez u-blox, jest oparty o ostatnią znaną pozycję. Czujniki pojazdu przekazują informację o tym jak daleko i w jakim kierunku się on przemieścił wprost do odbiornika GPS. Dane te, razem z pozycją z GPS są przetwarzane, dając w efekcie 100% pokrycia i bardzo dokładne, ciągłe określenie pozycji, nawet w niesprzyjających warunkach (np. „kanionach miejskich”) lub przy braku sygnału GPS (np. w tunelach i garażach).
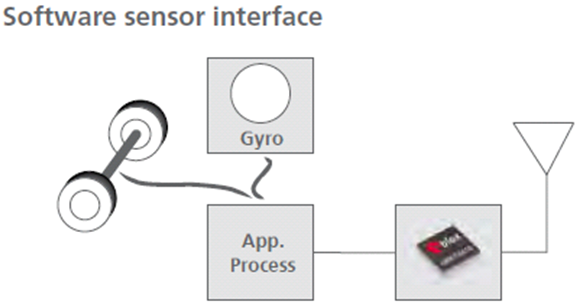 Rys. 6. Automotive Dead Reckoning w systemie nawigacyjnym montowanym fabrycznie, opartym na układzie GPS UBX-G6010-SA-DR
Rys. 6. Automotive Dead Reckoning w systemie nawigacyjnym montowanym fabrycznie, opartym na układzie GPS UBX-G6010-SA-DRADR przyjmuje dane z czujników różnych rodzajów. Klasyczny zestaw, nazwany Gyroscope plus Wheel Tick (GWT), zawiera żyroskop zapewniający informację o kierunku oraz czujnik obrotów koła, dający informację o prędkości. Alternatywnym rozwiązaniem jest określenie kursu różnicowo w oparciu o informacje z pary lub nawet wszystkich czterech kół, co jest nazywane Differential Wheel Tick (DWT). Jest to rozwiązanie nieco gorsze niż GWT, ale jego istotną zaletą jest oszczędność kosztów żyroskopu.
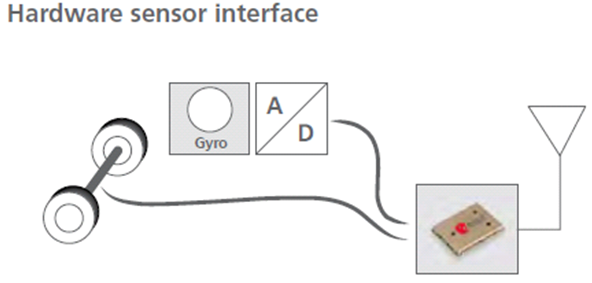 Rys. 7. Automotive Dead Reckoning w osobistym systemie nawigacyjnym (kupowanym osobno), opartym na module GPS LEA-6R
Rys. 7. Automotive Dead Reckoning w osobistym systemie nawigacyjnym (kupowanym osobno), opartym na module GPS LEA-6R Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle
Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle  Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników
Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników  AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii
AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii 






