





Ethernetowy bootloader dla mikrokontrolerów Freescale Kinetis

Jednym z narzędzi opracowanych przez firmę Freescale dla swoich mikrokontrolerów jest ethernetowy bootloader. Niniejszy artykuł jest swego rodzaju przewodnikiem pomagającym w jego implementacji w nowym, bądź istniejącym już projekcie programistycznym. Bootloader przeznaczony jest dla różnych platform sprzętowych np. rodziny mikrokontrolerów Kinetis, MCF52259, czy MCF51CN128. W przedstawionym opracowaniu skupiono się na rodzinie opartych na rdzeniu ARM Cortex-M4 układów Kinetis (a dokładnie na modelu K60N512, dla którego przygotowano oprogramowanie i przeprowadzono testy jego działania). W artykule wyjaśniono jak zmodyfikować pliki linkera .lcf i .icf odpowiednio dla IDE CodeWarrior oraz IAR (IAR Embedded Workbench for ARM) w celu dodania do projektu programistycznego funkcjonalności ethernetowego bootloadera.

O bootloaderze
Bootloader to prosty program, który umożliwia załadowanie/uaktualnienie oprogramowania znajdującego się w pamięci Flash układu. Do przesłania programu z urządzenia host do programowanego układu bootloader może wykorzystać jeden z wielu popularnych standardów komunikacyjnych np. SPI, I2C, Ethernet, USB i inne. W opisanym tu przypadku wykorzystywany jest standard Ethernet. Bootloader pracuje jako klient TFTP wykorzystując usługę DHCP.
Architektura bootloadera
Miejscem przeznaczonym na bootloader w układzie programowanym jest pierwszych 48 kB pamięci Flash, jednak bootloader może zajmować mniej pamięci. Właściwa aplikacja może zostać umieszczona w dalszej części pamięci Flash (tzn. za bootloaderem). Ostatnie 4 kB pamięci Flash są zarezerwowane do przechowywania parametrów bootloadera.
Na rysunku 1 przedstawiono mapę pamięci mikrokontrolera Kinetis MK60n512oraz umiejscowienie w niej obszaru przeznaczonego na bootloader. Kod bootloadera umieszczony jest na początku pamięci (od adresu 0x0000_0000 do 0x0000_BFFF). Parametry bootloadera przechowywane są w pod pierwszym adresem ostatniego logicznego bloku pamięci Flash (od 0x0007_F000 do 0x0008_0000).
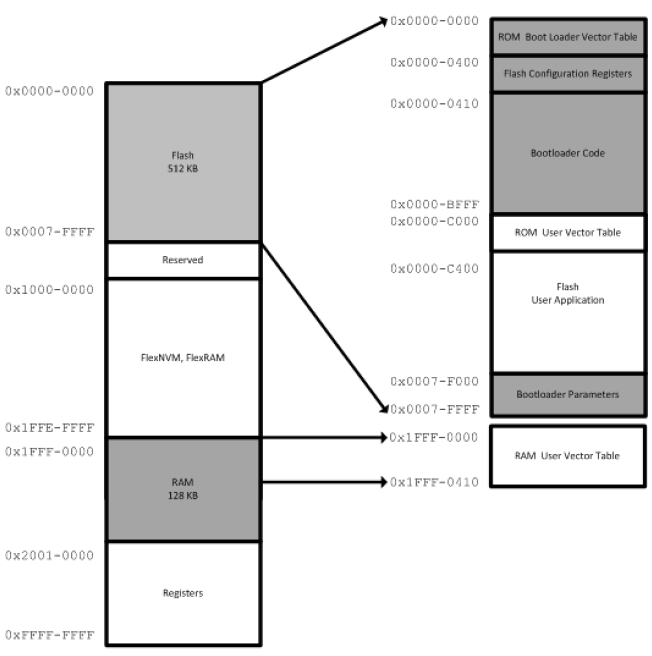
Rys. 1. Mapa pamięci układu Kinetis MK60n512
Zasada działania bootloadera
Na rysunku 2 przedstawiono schemat blokowy przedstawiający kolejne kroki działania bootloadera. Po włączeniu zasilania mikrokontrolera, bootloader rozpoczyna swoje działanie. W pierwszej kolejności następuje odczytanie wartości zmiennej boot value . Wartość ta jest jedynym kryterium, na podstawie którego podejmowana jest decyzja co do dalszego działania bootloadera. Możliwe opcje to ‘go’ (wykonanie aplikacji właściwej mikrokontrolera), ‘script’ (wykonanie skryptu bootloadera), ‘stop’ (zatrzymanie). W trybie ‘script’ możliwe jest wykonanie komend: ‘dhcp’, ‘erase all’, ‘ftp’, ‘set boot go’, ‘go’. Szczegółowy opis skryptu został przedstawiony w rozdziale o nazwie „ Uruchamianie ethernetowego bootloadera ”. Wywołanie komendy ‘go’ spowoduje rozpoczęcie wykonywania aplikacji użytkownika.

Rys. 2. Schemat blokowy bootloadera
Projekt programistyczny wykorzystujący ethernetowy bootloader
W tym rozdziale opisany został sposób modyfikacji pliku rozkazów linkera ( .lcf dla CodeWarrior oraz .lcf dla IAR), aby zarezerwować przestrzeń pamięci, w której znajdzie się bootloader.
 Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle
Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle  Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników
Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników  AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii
AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii 






