





Zawody robotów Robomaticon 2013
Wyścigi, walki, szukanie wyjścia z labiryntu i spektakularne przeloty nad publicznością – to tylko niektóre z zadań, z jakimi musiały się zmierzyć roboty biorące udział w zawodach „Robomaticon 2013”, które odbyły się 9. marca w Warszawie. Ponad 80 zarejestrowanych konstrukcji, podzielonych na 6 kategorii, przykuwało uwagę swoim kunsztem wykonania, świadczącym o dużych umiejętnościach ich konstruktorów.
„Robomaticon 2013” to już trzecia edycja zawodów, przygotowana przez studentów z koła naukowego Robomatic. Liczba uczestników stawia ją w czołówce największych tego typu imprez zorganizowanych w Polsce. Ponad 80 zarejestrowanych konstrukcji wzięło udział w 6 kategoriach, z których każda cieszyła się dużym zainteresowaniem odwiedzających Gmach Główny Politechniki Warszawskiej w sobotę, 9 marca 2013r.
Kto pierwszy, ten lepszy – kategoria Line Follower
Tajemnicze białe płyty rozłożone w strategicznych punkach Auli Głównej okazały się być torami, po których ścigały się roboty mobilne o wymiarach nieprzekraczających wielkości kartki A4. Trasę przejazdu wyznaczała czarna linia, a zadaniem konstrukcji było samodzielne jej pokonanie w jak najkrótszym czasie. Rozwiązań technicznych było bardzo wiele. Jedne drużyny zdecydowały się na zwiększoną liczbę czujników linii, inne na turbiny „wysysające” powietrze spod podwozia i poprawiające przyczepność robota, a jeszcze inne preferowały prostotę i maksymalne wykorzystanie potencjału mocnych silników i specjalnie przygotowanego ogumienia kół. Były też roboty łączące te wszystkie cechy i to właśnie ich drużyny triumfowały po ogłoszeniu wyników finałów.

Fot. 1. Robot kategorii Line Follower powinien przejechać całą trasę w jak najkrótszym czasie, nie wyjeżdżając swoim obrysem poza krawędzie linii
Roboty radziły sobie zaskakująco dobrze, niejednokrotnie przygotowania do startu trwały dłużej, niż sam przejazd. Zdecydowanie najlepiej wypadły tzw. „turbinowce”, czyli roboty z silnikami tunelowymi zwiększającymi ich docisk. Huk działających turbin dodatkowo wzmagał emocje i zainteresowanie odwiedzających, więc przez cały czas trwania konkurencji, barierki szczelnie otaczał tłum widzów. Ze względu na duże prędkości rozwijane przez roboty (do kilku m/s), do pomiaru czasów wykorzystano czujniki optyczne w postaci dalmierzy, a nad przebiegiem wyścigów czuwała specjalnie powołana drużyna sędziowska.

Fot. 2. Najlepsze „linefollowery” pokonywały całą trasę w ciągu 4 sekund, a różnice w ich wynikach nie przekraczały kilkudziesięciu milisekund
Przepychanki na ringu, czyli kategorie Sumo
Sumo i jej pochodne są jednymi z najstarszych konkurencji rozgrywanych na świecie. Podział wprowadzono ze względu na wymiary i wagę robotów, dostosowując do nich rozmiary ringu i szczegóły regulaminu. Dzięki temu przeprowadzane są zarówno walki 25-gramowych „maleństw” mieszczących się obrysem w sześcianie o boku dł. 2,5 cm (Nanosumo), jak i 3-kilogramowych robotów, o wymiarach podstawy nieprzekraczających 20 x 20 cm (Sumo). W Polsce największą popularnością cieszy się podkategoria pośrednia, czyli Minisumo. Roboty ważą do 500 g i nie mogą mieć przynajmniej dwóch wymiarów zewnętrznych przekraczających 10 cm. Co ciekawe, ograniczenie to dotyczy tylko odliczania przed walką, więc wiele konstrukcji jest wyposażonych w specjalne „klapki” i pługi, które po określonym czasie rozkładają się i zwiększają szansę na wypchnięcie przeciwnika poza obszar ringu.
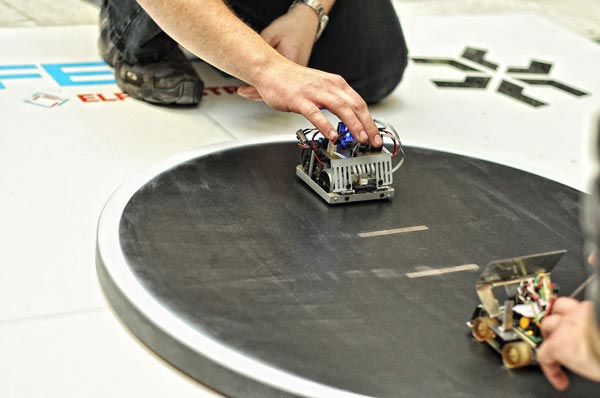
Fot. 3. Po znaku danym przez sędziego, operatorzy robotów muszą go uruchomić i w ciągu 5 sekund opuścić obszar dookoła ringu, żeby nie zakłócać działania ich czujników
Rozgrywki odbyły się w systemie grupowym, dzięki czemu rywalizacja przebiegła sprawnie i była efektowna dla publiczności. Na ogrodzonym obszarze w centrum Auli Głównej zgromadzono kilka ringów, przez co komisja sędziowska przemieszczała się, a zawodnicy mieli trochę więcej czasu na ostatnie przygotowania robotów do walki. Ze względu na małą liczbę uczestników, podkategorie Sumo oraz Nanosumo rozegrano tylko podczas finałów, bez fazy eliminacji.

Fot. 4. Przygotowano także kilka „prezentacyjnych” robotów i ring – jak widać, cieszyły się sporym zainteresowaniem najmłodszych
Robomysz w labiryncie, czyli kategoria Micromouse
Ponoć inteligencja myszy i szczurów pozwala im znaleźć wyjście z każdego labiryntu. Czy da się jednak znaleźć sposób na zaimplementowanie takiej inteligencji w kilkudziesięciu gramach krzemu? Przed tego typu zadaniem stają od dawna konstruktorzy robotów kategorii Micromouse. Ponieważ samo odnalezienie wyjścia nie stanowi już problemu, postanowiono wprowadzić do konkurencji pomiar czasu i podzielono przejazd robota na dwa etapy. Najpierw konstrukcja musi zbadać wszystkie zakamarki labiryntu, żeby algorytm mógł operować na jak największej liczbie danych. Po powrocie do pozycji początkowej, następuje tzw. speedrun, czyli przejazd przez labirynt w jak najkrótszym czasie, po optymalnej trasie wyznaczonej przez program. Warto wiedzieć, że za „wyjście” z labiryntu uznaje się jego środek, a pozycja startowa na ogół mieści się w jednym z narożników planszy.
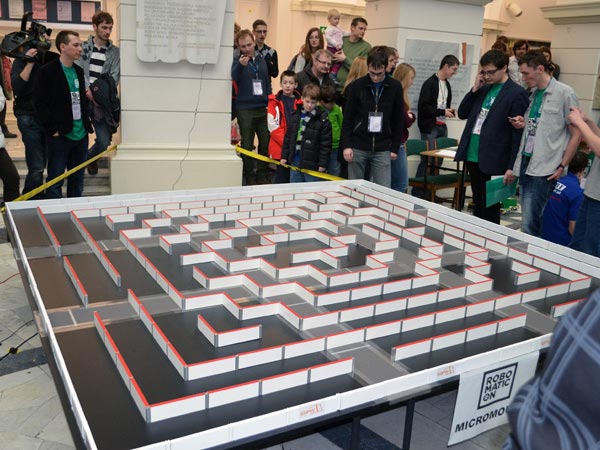
Fot. 5. Przepisowa plansza-labirynt kategorii Micromouse
Ponieważ przejazdy „badawcze” trwają na ogół bardzo długo, a roboty niejednokrotnie natrafiają na nieprzewidziane przeszkody w postaci np. krzywych łączeń płyt i nie dojeżdżają do celu, konkurencja może wydawać się mało ciekawa i emocjonująca dla postronnego obserwatora. Trzeba jednak zauważyć, że Micromouse jest kategorią stosunkowo nową w Polsce, uznawaną za jedną z najtrudniejszych, a mimo to błyskawicznie się rozwija – być może już za kilka lat dorównamy, czy nawet pokonamy tego typu roboty budowane w Japonii.

Fot. 6. Zainteresowanych kategorią Minisumo nie brakowało przez cały czas trwania konkurencji
 Rozpoczęła się europejska księżycowa misja Artemis II – statek kosmiczny Orion wraz z załogą wystartował dzisiaj z Florydy
Rozpoczęła się europejska księżycowa misja Artemis II – statek kosmiczny Orion wraz z załogą wystartował dzisiaj z Florydy  Creotech Instruments zakończył proces podziału – debiut Creotech Quantum na GPW planowany na 17 kwietnia 2026 roku
Creotech Instruments zakończył proces podziału – debiut Creotech Quantum na GPW planowany na 17 kwietnia 2026 roku  element14 Community ogłasza wyzwanie w zakresie inteligentnego projektu przemysłowego
element14 Community ogłasza wyzwanie w zakresie inteligentnego projektu przemysłowego 




