





Mikrokontrolery XMC4000 w aplikacjach DSP: cyfrowe sterowniki silników elektrycznych, zasilacze, konwertery energii
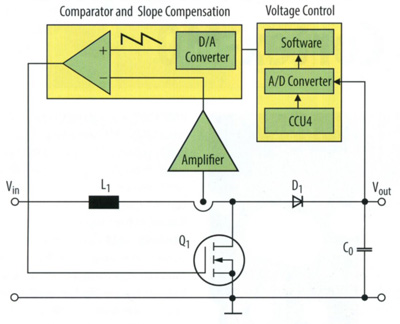
Rys. 5. Schemat regulacji prądu szczytowego przy pomocy XMC4000
Na rysunku 5 przedstawiono strukturę systemu regulującego prąd szczytowy, zbliżonego do regulatora analogowego, ale nie wymagający tak dużej liczby elementów. Kiedy blok CSG używany jest w trybie niezależnym (analogowym), wyjście komparatora zmienia się w prosty sposób na podstawie napięcia wejściowego i wartości zaprogramowanej przez mikrokontroler w przetworniku C/A.
W trybie wysokiej rozdzielczości, wznoszące zbocze sygnału generowane jest przez układ CCU8, a następnie podawane jest do bloku 150 ps, gdzie jest odpowiednio opóźniane. Zbocze opadające generowane jest przez komparator, tak jak to opisano powyżej, i również podawane do bloku 150 ps. Na rysunku 6 pokazano cały blok. W mikrokontrolerach XMC4000 zastosowano po trzy moduły CSG i HRC.
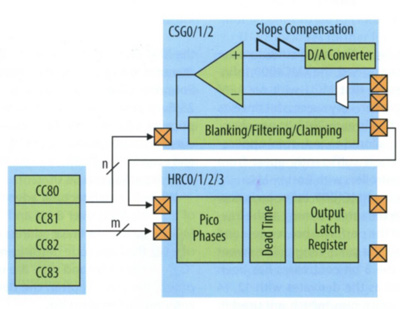
Rys. 6. Oprócz kanału dla sygnału o okresie 150 ps, blok PWM o wysokiej rozdzielczości zawiera także blok komparatora i kompensacji rampowej, które można wykorzystywać niezależnie
W wielu przypadkach mikrokontrolery z serii XMC4000 nie tylko pomagają pozbyć się niektórych elementów (procesora sygnałowego i układu FPGA), ale dają też coś więcej: jeśli jesteśmy w stanie zaoszczędzić 10% energii w szafie przełącznikowej poprzez precyzyjną regulację, to dodatkowym zyskiem będzie lepszy współczynnik kształtu i wolniejsze zużycie wiatraków chłodzących. Użyteczność szafy przełącznikowej, która nie potrzebuje wiatraków jest o wiele większa niż takiej, która ich wymaga. I jest to zdecydowanie większa oszczędność niż cena dwóch chipów.
 Grzegorz Kamiński: Dlaczego powstały tranzystory FinFET i GAAFET?
Grzegorz Kamiński: Dlaczego powstały tranzystory FinFET i GAAFET?  Google stawia na fuzję jądrową. AI potrzebuje coraz więcej energii
Google stawia na fuzję jądrową. AI potrzebuje coraz więcej energii  Fotowoltaika perowskitowa: od wydajności laboratoryjnej do masowej komercjalizacji
Fotowoltaika perowskitowa: od wydajności laboratoryjnej do masowej komercjalizacji 

![O konkursie organizowanym przez firmę TRUMPF Huettinger i polskie uczelnie techniczne opowiada Alicja Peresada i prof. Jacek Rąbkowski oraz kilkoro nagrodzonych dyplomantów: mgr inż. Jakub Dobosz, inż. Maja Zielińska, dr inż. Jakub Kołodziej, dr inż Weronika Hryniewska-Guzik i dr inż. Grzegorz Bartyzel. Zapraszamy do obejrzenia filmu! [materiał redakcyjny]](https://mikrokontroler.pl/wp-content/uploads/2026/07/TRUMPF-czolowka.png "https://www.youtube.com/watch?v=XkeyLmtLfxo")



