





Protokół HART – dla kogo, do czego, jakich podzespołów użyć?
Sieci przemysłowe (field networks) nie są jedynym obszarem aplikacyjnym pozwalającym wykorzystywać inteligentne urządzenia przemysłowe. Protokół HART daje w tym zakresie wiele możliwości, nawet przy instalacjach wykorzystujących standardowe pętle prądowe 4…20 mA.
Urządzenia komunikujące się za pomocą protokołu HART przesyłają dane po liniach transmisyjnych wykorzystując w warstwie fizycznej pętlę prądową 4…20 mA. Pozwala to parametryzować urządzenia w sieci i uruchamiać je w wygodny sposób, a także odczytywać wyniki pomiarów i dane zapisane w ich pamięci.
Protokół HART (Highway Addressable Remote Transducer) pojawił się w 1989 roku i zdobył popularność w wielu zastosowaniach przemysłowych, umożliwiając dwukierunkową komunikację nawet w trudnych warunkach środowiskowych. Pozwala on na wykorzystanie do dwóch urządzeń nadrzędnych (master): konsoli inżynierskiej w stacji sterowania oraz drugiego urządzenia pracującego w terenie, np. laptopa czy terminala ręcznego.
|
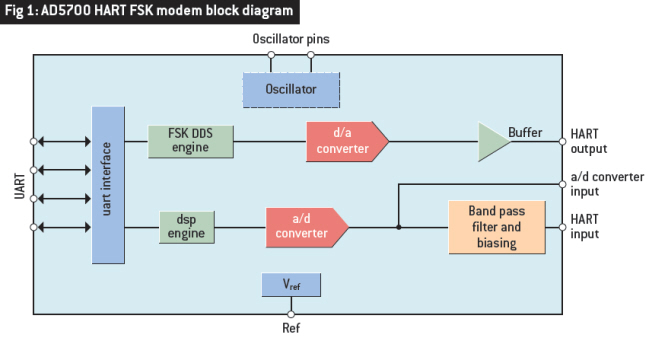
Firma Analog Devices jest producentem scalonych modemów HART, w których zintegrowano wszystkie elementy niezbędne do prawidłowego działania węzła komunikacyjnego tej sieci. Schemat blokowy układu AD5700 przedstawiamy poniżej, szczegółowe informacje o innych układach dla aplikacji tego typu są dostępne pod adresem, a w najbliższych dniach przedstawiy opis konstrukcji modemu HART bazującego na układzie AD5700. |
Najważniejsze cechy użytkowe protokołu HART:
- jest sprawdzony w praktyce, łatwy jeśli chodzi o projektowanie, utrzymanie i używanie,
- jest kompatybilny z typowym, analogowym sprzętem pomiarowym,
- umożliwia jednoczesną komunikację analogową i cyfrową,
- pozwala na pracę w trybie punkt-punkt oraz multidrop,
- daje elastyczność w dostępie do danych, dzięki dwóm urządzeniom master,
- obsługuje urządzenia o wielu zmiennych,
- ma wystarczający czas odpowiedzi, wynoszący ok. 500 ms,
- jest de facto standardem otwartym, dostępnym dla wszystkich producentów i użytkowników.
Organizacja HCFHART jest otwartym protokołem komunikacyjnym pozwalającym połączyć urządzenie nadrzędne z urządzeniem podrzędnym, który może być implementowany przez wszystkich producentów i wykorzystywany przez użytkownika. Konieczną pomoc techniczną świadczy HART Communication Foundation (HFC). Ta niezależna od producentów organizacja non-profit promuje szerokie wykorzystywanie technologii HART oraz bierze na siebie odpowiedzialność za wspieranie standardu otwartego protokołu i koordynację prac nad nim, a także zarządza opisami wszystkich zarejestrowanych urządzeń zgodnych ze standardem. |
Łączenie urządzeń za pomocą protokołu HART
Urządzenia wykorzystujące protokół HART dzielą się na urządzenia nadrzędne (host/master) i podrzędne (field/slave). Urządzeniami hostującymi mogą być zarówno przenośne terminale ręczne, jak i stacje robocze, np. pracujące w centrum sterowania. Jako slave mogą natomiast pracować czujniki, nadajniki i rozmaite urządzenia wykonawcze. Paleta rozwiązań do wyboru rozciąga się od urządzeń dwu- i czteroprzewodowych do w pełni zabezpieczonych wersji używanych w niebezpiecznych warunkach środowiskowych. Dane protokołu HART są nakładane na sygnał pętli 4-20 mA poprzez modem FSK. Pozwala to urządzeniom komunikować się cyfrowo bez zaburzania transmisji analogowej.
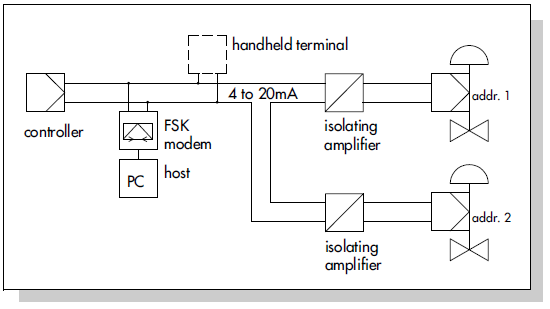
Urządzenia pracujące w terenie i niewielkie terminale ręczne mają zintegrowane modemy FSK, a stacje robocze PC wyposażone są w interfejs szeregowy pozwalający podłączać modemy zewnętrzne. Na rysunku 1 przedstawiony został typowy schemat połączenia hosta i urządzenia podrzędnego HART. Protokół ten jest często wykorzystywany w takich właśnie prostych konfiguracjach typu punkt-punkt, ale można go też stosować w wielu innych wariantach połączeń.
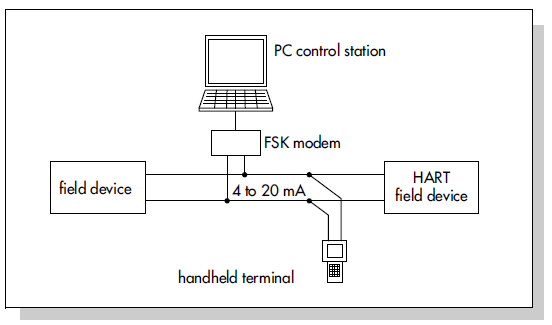
Rys. 1. Schemat połączeń urządzeń za pomocą interfejsu z protokołem HART
W systemach rozszerzonych, liczbę dostępnych urządzeń można zwiększyć za pomocą multipleksera. Co więcej, HART umożliwia współpracę urządzeń w konfiguracjach przeznaczonych do zastosowań specjalnych. Wśród dostępnych wariantów są: multidrop, FSK bus oraz sieci do pracy z podziałem zakresu (split-range).
Liczba urządzeń i adresowanie: połączenie punkt-punkt
Konfiguracja zaprezentowana na rysunku 1, w której jedno urządzenie pracujące jako master łączy się z jednym urządzeniem podrzędnym (field device) jest nazywana „punkt-punkt”. Ten wariant wymaga, aby adres urządzenia podrzędnego był na stałe ustawiony na wartość zero, gdyż program sterujący używa takiego adresu.
Multiplekser
Na rysunku 2 przedstawiono wykorzystanie multipleksera, pozwalającego połączyć dużą liczbę urządzeń w sieć HART.
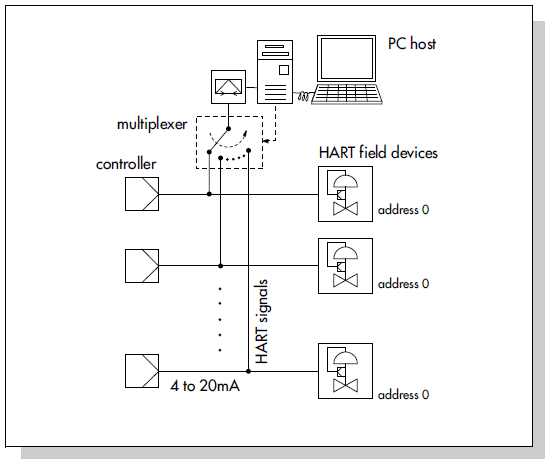
Rys. 2. Konfiguracja systemu wymiany danych z protokołem HART z wykorzystaniem multipleksera
Użytkownik wybiera konkretną pętlę prądową poprzez system operacyjny. Tak długo, jak trwa komunikacja, multiplekser łączy tę pętlę z hostem. Dzięki kaskadowej strukturze multiplekserów, host może łączyć się z wieloma (>1000) urządzeniami o adresie ustawionym na zero.
Tryb multidrop
Protokół HART był pierwotnie projektowany pod kątem nadajników. Dla nich też rozwinięto tryb multidrop, w którym urządzenia wymieniają się danymi i wynikami pomiarów wyłącznie poprzez protokół HART. Analogowy sygnał prądowy służy tylko do zasilania dwuprzewodowych urządzeń, dostarczając stały prąd o natężeniu 4 mA.
W trybie multidrop, do pojedynczej pary przewodów podłączane jest równolegle do 15 urządzeń (rysunek 3). Host rozróżnia urządzenia dzięki adresom, przyjmującym wartości od 1 do 15.
W trybie multidrop nie można używać zaworów regulacyjnych. Jak pokazano w obliczeniach na rysunku 16, cyfrowa komunikacja z użyciem protokołu HART jest zbyt wolna by wybrać wartość wodzącą (set point) i sygnały sterujące zaworem są zawsze transmitowane jako standaryzowane sygnały prądowe pętli 4-20 mA.
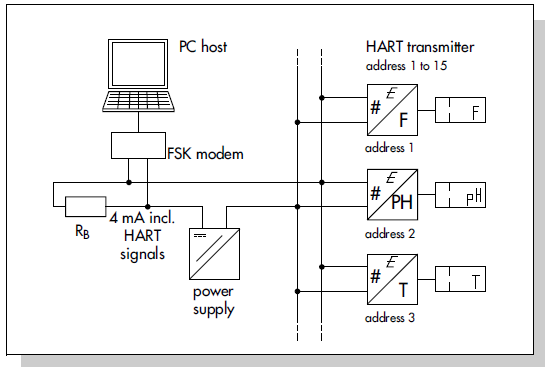
Rys. 3. Nadajniki HART w trybie multidrop
Magistrala do pracy z podziałem zakresu (split-range)
Istnieją zastosowania wymagające tego, by kilka elementów wykonawczych (najczęściej dwa) otrzymało ten sam sygnał sterujący. Typowym przykładem jest tu system zaworów regulacyjnych z podzielonym zakresem pozycjonowania. Jeden zawór pracuje w nominalnym zakresie prądów od 4 do 12 mA, a drugi wykorzystuje natężenia od 12 do 20 mA.
Przy pracy z podziałem zakresu, zawory są podłączone do pętli prądowej szeregowo. Jeśli oba wykorzystują protokół HART, urządzenie nadrzędne musi umieć je rozróżnić. Aby było to możliwe, protokół w wersji 6 i późniejszych został rozszerzony o jeszcze jeden wariant sieciowy.
Tak jak w trybie multidrop, każde z urządzeń ma nadawany adres od 1 do 15, a sygnał analogowy 4…20 mA zachowuje swoją funkcję, którą w przypadku zaworów sterujących jest wybór odpowiedniej odległości (travel). Aby użycie protokołu HART było możliwe także w takich zastosowaniach, jak systemy pracujące z podziałem zakresu, pozycjoner HART firmy SAMSON zawsze używa analogowego sygnału prądowego jako zmiennej odniesienia, niezależnie od adresu urządzenia (rysunek 4).
Rys. 4. System z dwoma pozycjonerami HART pracujący z podziałem zakresu
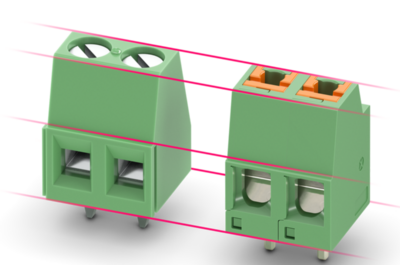 Zmiana technologii przyłączeniowej bez modyfikacji PCB? Konstrukcja TWIN w terminalach SPTH od Phoenix Contact
Zmiana technologii przyłączeniowej bez modyfikacji PCB? Konstrukcja TWIN w terminalach SPTH od Phoenix Contact 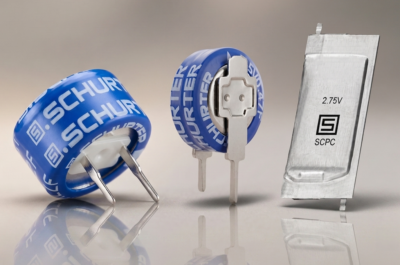 Nowość w ofercie firmy SCHURTER: superkondensatory – ultrakompaktowe i jednocześnie niezwykle wydajne
Nowość w ofercie firmy SCHURTER: superkondensatory – ultrakompaktowe i jednocześnie niezwykle wydajne  Dyrektywy ATEX a materiały wybuchowe – gdzie kończy się zakres przepisów?
Dyrektywy ATEX a materiały wybuchowe – gdzie kończy się zakres przepisów? 

![O konkursie organizowanym przez firmę TRUMPF Huettinger i polskie uczelnie techniczne opowiada Alicja Peresada i prof. Jacek Rąbkowski oraz kilkoro nagrodzonych dyplomantów: mgr inż. Jakub Dobosz, inż. Maja Zielińska, dr inż. Jakub Kołodziej, dr inż Weronika Hryniewska-Guzik i dr inż. Grzegorz Bartyzel. Zapraszamy do obejrzenia filmu! [materiał redakcyjny]](https://mikrokontroler.pl/wp-content/uploads/2026/07/TRUMPF-czolowka.png "https://www.youtube.com/watch?v=XkeyLmtLfxo")



