






Jitter, pętle PLL, generacja sygnałów zegarowych – elementarz
Na rysunku 17 przedstawiono funkcję przenoszenia jitteru dla pętli PLL drugiego rzędu o paśmie 100 Hz. Warto zauważyć, że tłumienie na częstotliwości 100 Hz wynosi 3 dB, tak jak oczekuje się od filtrów dolnoprzepustowych o takiej właśnie częstotliwości odcięcia.
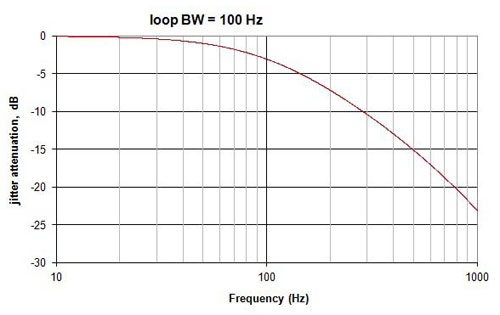
Rys. 17. Tłumienie jitteru w funkcji częstotliwości odchylenia od nośnej
Przyjrzyjmy się teraz wykresom szumów fazowych otrzymanym dla sygnału zegarowego zmodulowanego FM, aby zaobserwować, jak pasmo pętli wpływa na tłumienie jitteru. Wykresy te przestawiają jitter sygnału z generatora Rohde & Schwarz SML 03 RF, zmodulowanego w częstotliwości pojedynczą sinusoidą, podłączonego na wejścia pętli PLL Si5324 o paśmie 7 Hz oraz pętli Si5326 o paśmie 120 Hz. Jitter sygnału z generatora oraz obu pętli są nałożone na siebie. Przypadek bez modulacji przedstawiony jest na rysunku 16. Wykres szumów fazowych na rysunku 18 odpowiada częstotliwości modulacji równej 500 Hz, a wykres z rysunku 19 – częstotliwości modulacji 10 kHz.
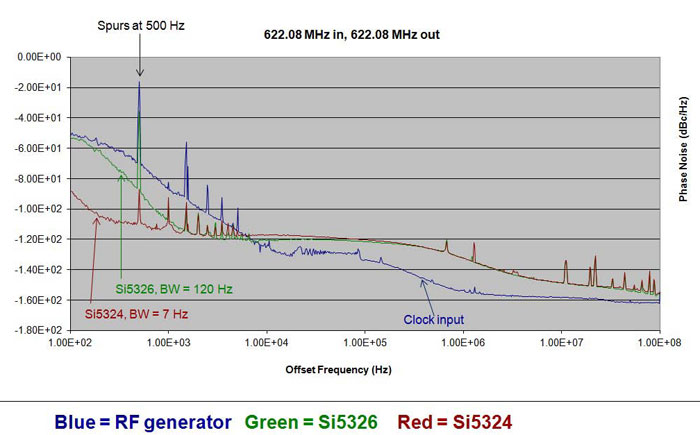
Rys. 18. Tłumienie jitteru przy odchyleniu 500 Hz
Warto zauważyć, że wysoki prążek boczny występujący dla częstotliwości 500 Hz jest tylko nieznacznie tłumiony przez pętlę Si5326 o paśmie 120 Hz, ale za to znacznie wytłumiony przez pętlę Si5324 o paśmie 7 Hz. Znaczna różnica w tłumieniu dla niewielkich odchyleń jest związana z węższym pasmem pętli. Na wykresie z rysunku 19, przedstawiającym tłumienia dla jitteru 10 kHz, tłumienie obu pętli jest podobne, gdyż częstotliwość ta leży znacznie powyżej ich częstotliwości odcięcia.
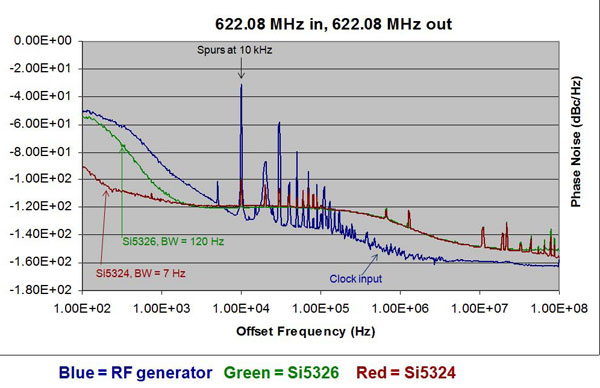
Rys. 19. Tłumienie jitteru przy odchyleniu 10 kHz
W tabeli 3 zestawione są wartości RMS jitteru dla każdego z przypadków. Dolna granica pasma całkowania dla jitteru 500 Hz została poszerzona z 500 do 100 Hz, aby obejmować interesującą tu częstotliwość modulacji. Warto zwrócić uwagę, że chociaż RMS jitteru dla częstotliwości 500 Hz jest znacznie wyższe dla pętli Si5326, niż dla Si5324, obie pętle mają podobne wartości RMS dla odchylenia 10 kHz.
Tab. 3. Wartości RMS jitteru dla wykresów szumów fazowych (w pikosekundach)
| Częstotliwość jitteru | Jitter źródła | Si5326, 120 Hz | Si5324, 7 Hz | Pasmo całkowania |
| 0 | 1.18 | 0.293 | 0.281 | 500 Hz – 50 MHz |
| 500 Hz | 165 | 18.6 | 0.295 | 100 Hz – 50 MHz |
| 10 kHz | 139 | 0.302 | 0.304 | 500 Hz – 50 MHz |
Krzywe przenoszenia jitteru dla pętli Si5324 i Si5326 są przedstawione na rysunku 20, wraz z krzywą dla pętli Si5338, która jest pętlą szerokopasmową o paśmie 1 MHz, w związku z czym tłumi niewielką część jitteru. W konsekwencji, aby dla pętli tego typu uzyskać niewielki poziom jitteru wyjściowego, trzeba ją wysterowywać sygnałem zegarowym o bardzo niskim jitterze.
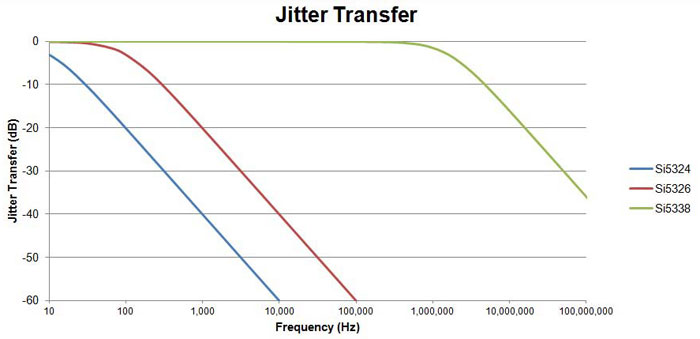
Rys. 20. Funkcje przenoszenia jitteru dla pętli wąsko- i szerokopasmowych.
Trzeba pamiętać, że wybór pętli o odpowiednim paśmie zależy od zastosowania. Jeśli źródło sygnału zegarowego ma niewielki jitter, pętla o szerszym paśmie może się sprawdzić, ale jeśli sygnał zegara ma znaczny jitter, należy rozważyć pętlę o węższym paśmie. W takich rozważaniach zawsze trzeba wziąć pod uwagę wymagania całego systemu. Niektóre standardy sieciowe ustalają niższe wymagania na odchylenia od częstotliwości nośnej i pozwalają w ogóle nie brać pod uwagę jitteru poniżej określonej częstotliwości odchylenia. Przykładami takich standardów są: SONET, OTN i Ethernet. Inne standardy wymagają jednak pętli o bardzo wąskim paśmie, nawet do 0,1 Hz (np. SyncE ITU-T G.8262, opcja 2). W sieciach służących do transportu video, w związku z liczbą transmitowanych klatek na sekundę, zwykle istotny jest tylko jitter do 30 Hz, co wymusza zastosowanie pętli o paśmie poniżej 10 Hz.
Ostatnią z charakterystyk pętli PLL, które trzeba wziąć pod uwagę jest tolerancja na jitter, która oznacza wartość międzyszczytową jitteru sygnału zegarowego, która może się pojawić na wejściu pętli bez ryzyka utraty synchronizacji. Tolerancja ta zależy zarówno od pasma pętli, jak i od częstotliwości odchylenia. Tolerancja na jitter dla odchyleń poniżej szerokości pasma pętli jest oczywiście duża, gdyż pętla po prostu przepuszcza jitter na wyjście bez tłumienia. Pętla o wąskim paśmie ma więc niższą tolerancję na jitter, niż pętla o paśmie szerokim. Typowa krzywa tolerancji na jitter przedstawiona jest na rysunku 21, na którym BW oznacza szerokość pasma pętli. Jak pokazuje wykres, dla częstotliwości leżących na brzegu pasma tolerancja się załamuje.
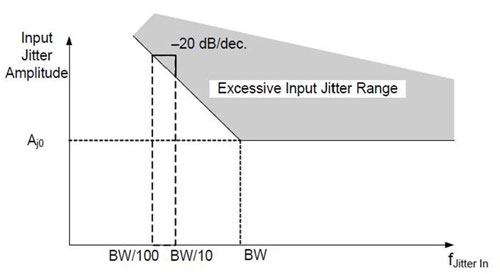
Rys. 21. Typowa krzywa tolerancji na jitter
Bufory zegara
Gdy mamy już do dyspozycji źródło sygnału zegarowego o niskim jitterze, często konieczne staje się rozdystrybuowanie tego sygnału do wielu różnych miejsc w systemie. Zwykle wykorzystywane są w tym celu bufory typu fan-out, które same mogą dodawać jitter do sygnału.
Na rysunku 22 przedstawiono sytuację, w której źródło sygnału zegarowego o jitterze J1 wysterowuje bufor, dodający jitter J2.
Jaki będzie jitter wyjściowy? Matematycznie rzecz biorąc, może on mieć dowolne wartości z przedziału od |J1-J2| do |J1+J2|. Innymi słowy, dwa źródła jitteru mogą się sumować lub odejmować – wszystko zależy tu od tego czy są one skorelowane.
Rys. 22. Jitter bufora sygnału zegara
Rozważania można uprościć, zakładając że jittery J1 i J2 nie są skorelowane. Jak pisaliśmy wcześniej, założenie to jest dobrze spełnione, jeśli oba jittery mają charakter czysto losowy, jednak sprawdza się ono tym słabiej, im większy staje się udział jitteru skorelowanego. Jeśli J1 i J2 faktycznie nie są skorelowane, jitter wyjściowy będzie miał wartość:
![]()
Jeśli zmierzymy jitter na wejściu i wyjściu bufora, to wkład jitteru J2 można opisać, jako pierwiastek z różnicy kwadratów tych wartości:
![]()
Zakładamy tu, że Jout > J1, co jest prawdą, jeśli rozsądna część jitteru jest nieskorelowana.
Rozważmy przykład przedstawiony na rysunku 23, wykorzystujący bufor cztery w jeden typu fan-out model Si5330 z addytywnym jitterem 0,15 pikosekund (scałkowanym od 12 kHz do 20 MHz).
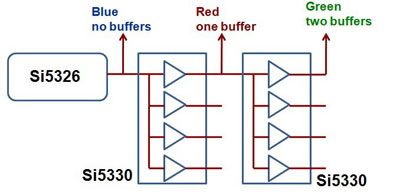
Rys. 23. Konfiguracja pomiarowa bufora typu fan-out
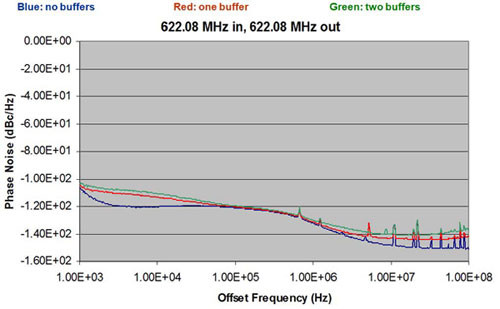
Rys. 24. Wykresy szumów fazowych bufora typu fan-out
Zgodnie z oczekiwaniami, najniższy poziom jitteru osiągany jest w konfiguracji bez bufora, a dodanie bufora zwiększa jitter. Ciekawe jest jednak, że dołożenie drugiego bufora nie powiększa jitteru tak bardzo, jak dodanie pierwszego. Dzieje się tak dlatego, że obliczamy wartość jitteru jako pierwiastek z sumy kwadratów, w związku z tym, że jest on losowy i nieskorelowany. W tabeli 4 zestawione są zmierzone i obliczone jako pierwiastki sum kwadratów wartości RMS jitteru bez bufora oraz z jednym i dwoma buforami.
Tab. 4. Wartości RMS jitteru bez bufora oraz z jednym i dwoma buforami (zmierzone i obliczone jako pierwiastki sum kwadratów)
| Pasmo jitteru | RMS jitteru | ||||
| Bez bufora | Jeden bufor, pomiar | Jeden bufor, obliczenia | Dwa bufory, pomiar | Dwa bufory, obliczenia | |
| 12 kHz…20 MHz | 258 fs | 304 fs | 298 fs | 357 fs | 334 fs |
Zauważmy, że wartości obliczone są zbliżone do zmierzonych, ale każdorazowe odrobinę niższe. Oznacza to, że część szumu jest faktycznie skorelowana. Przykładowe obliczenia dla jednego bufora, z wykorzystaniem specyfikacji zegara Si5330 (150 fs) wyglądają następująco:
![]()
Źródła:
-
Jitter, Noise and Signal Integrity at High-Speed, Mike Peng Li, wyd. Prentice Hall, 2008
-
High Speed Signal Propagation Advanced Black Magic, Howard Johnson, Martin Graham, wyd. Prentice Hall, 2003
 Miernik dozowania kleju 3M™ – kontrola proporcji mieszania w czasie rzeczywistym
Miernik dozowania kleju 3M™ – kontrola proporcji mieszania w czasie rzeczywistym  Kondensatory obwodu pośredniego prądu stałego o ultra niskiej indukcyjności przeznaczone do elektroniki mocy opartej na SiC
Kondensatory obwodu pośredniego prądu stałego o ultra niskiej indukcyjności przeznaczone do elektroniki mocy opartej na SiC  Prof. Ryszard Tadeusiewicz: Elektronika i mózg
Prof. Ryszard Tadeusiewicz: Elektronika i mózg 


![Szymon Robak oprowadza po katowickim Laboratorium Badań Kompatybilności Elektromagnetycznej w Sieć Badawcza Łukasiewicz - Instytucie Sztucznej Inteligencji i Cyberbezpieczeństwa. Zapraszamy na film! [materiał redakcyjny]](https://mikrokontroler.pl/wp-content/uploads/2026/06/Szymon-Robak-tytulowe.png "https://www.youtube.com/watch?v=gHcP8AajoN4")
![Zapraszamy do obejrzenia filmu i wysłuchania krótkich wypowiedzi prelegentów Hardware Forum 2026 i organizatorów majowej konferencji dla inżynierów z branży elektronicznej: Konrad Bruliński z Lemontech, prof. Krzysztof Kulpa z Politechniki Warszawskiej, Zbigniew Huber z FLC, Ewa Załupska z firmy KROK, Jerzy Kozieł z MPTECH, Grzegorz Potyralski z VIGO Photonics, dr Krzysztof Czuba z Politechniki Warszawskiej, Anna Beata Kalisz Hedegaard z Quantum Security Defence, Adrian Cichosz z Elhurt Dystrybucja Anna Kamińska z Creotech Quantum, oraz Łukasz Jaeszke i Adam Jaeszke z TEK.day [materiał redakcyjny]](https://mikrokontroler.pl/wp-content/uploads/2026/05/tytulowe-film-1.png "https://www.youtube.com/watch?v=BgxJVTwYJ-s")
