





Serwer wydruku na Raspberry Pi z funkcją automatycznego włącznika
A więc, jeżeli chcemy, aby wartość wyjściowa wyprowadzenia GPIO o numerze 20, była zmieniana na czas 120 sekund w momencie przyjęcia przez serwer Raspberry Pi informacji o zleceniu drukowania, wówczas w pliku:
vi /etc/init.d/cups_gpio_notifier_sysv
zmieniamy linię:
/usr/local/bin/cups_gpio_notifier & > /dev/null 2>&1
na
/usr/local/bin/cups_gpio_notifier -g 20 -t 120 & > /dev/null 2>&1
po czym restartujemy daemona:
sudo /etc/init.d/cups_gpio_notifier_sysv stop sudo /etc/init.d/cups_gpio_notifier_sysv start
Tym samym cały proces instalacji oprogramowania na platformie Raspberry Pi został zakończony. Do zakończenia projektu pozostało jedynie wykonanie prostych połączeń sprzętowych, które umożliwią nam sterowanie napięciem sieciowym za pomocą wyprowadzeń GPIO.
W przypadku napotkania problemów z funkcjonowaniem aplikacji „CUPS GPIO Notifier” warto przeanalizować dzienników logów systemowych:
cat /var/log/messages
Sprzęt
Istnieje kilka sposobów na realizację sterowania napięciem sieciowym poprzez wyprowadzenia GPIO. Do najpopularniejszych należą układy zbudowane na przekaźnikach oraz triakach. Autor zdecydował się na rozwiązanie składające się z połączenia optotriaka oraz triaka, według schematu przedstawionego na rysunku 5.
Rys. 5. Schemat budowy i podłączenia prostego przełącznika triakowego
Zastosowanie optotriaka pozwala na odizolowanie części wysokonapięciowej (triak) od części niskonapięciowej (Raspberry Pi), co jest niezwykle istotne ze względów bezpieczeństwa (zastosowanej elektroniki jak i nas samych). Sam układ składa się z minimalnej liczby komponentów o niewielkich wymiarach, stąd reazliując projekt PCB, możemy zdecydować się na umieszczenie prostego modułu wykonawczego w obudowach do montażu na szynie DIN, jak przedstawiono to na fotografiach 6 i 7.
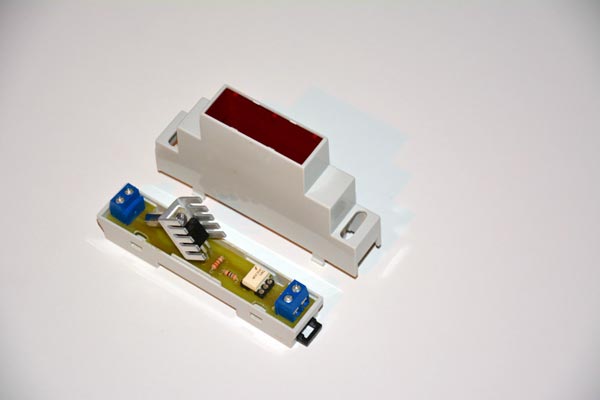
Fot. 6. Wnętrze modułu wykonawczego wraz z obudową do montażu na szynie DIN

Fot. 7. Moduł wykonawczy w obudowie DIN
W postaci większego układu sterowania (wykonanego na potrzeby testów), całość może zostać zrealizowana jak pokazano na fotografii 8.

Fot. 8. Przykładowy układ sterowania
Urządzenia klientów
Całość konfiguracji programowych i sprzętowych mamy już za sobą. Przyszedł czas na testy projektu, czyli wydrukowanie dowolnej strony z urządzeń podłączonych do naszej sieci lokalnej. Dla użytkowników systemu Linux, instalacja drukarki sieciowej nie będzie stanowiła większego problemu, dlatego też w rozdziale tym zostaną przedstawione wyłącznie opisy dla komputerów z systemem Windows oraz urządzeń z systemem Android.
Instalacja drukarki sieciowej w systemie Windows
Instalacja drukarki sieciowej w systemie Windows odbywa się poprzez wybór menu Urządzenia i drukarki w opcjach Panelu Sterowania. Z górnego menu wybieramy opcję Dodaj nową drukarkę , po czym zaznaczamy opcję Dodaj drukarkę sieciową, bezprzewodową lub Bluetooth. System przełączy się w automatyczny tryb wyszukiwania drukarek. Jeżeli nasza drukarka nie została odnaleziona, zaznaczamy opcję Drukarki, której szukam, nie ma na liście , po czym manualnie wskazujemy ścieżkę do naszego urządzenia:
http://adres_ip_raspbberypi:631/printers/nazwa_drukarki
Rys. 9. Konfiguracja drukarki sieciowej w systemie Windows
Po zainstalowaniu sterowników nasze urządzenie jest widoczne jak pozostałe drukarki w systemie Windows.
 Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle
Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle  Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników
Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników  AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii
AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii 






