





Kostka-robot, która chodzi, skacze i utrzymuje równowagę
Cubli jest robotem-kostką, która może podskakiwać, chodzić i zachowywać równowagę. Wykorzystuje koła zamachowe o wysokiej prędkości kątowej, które kręcą się i gwałtownie hamują. Zachowanie pędu w momencie hamowania sprawia, że kostka podskakuje do góry. Gdy kostka stanie na krawędzi lub rogu, silniczki kontrolujące moment obrotowy sprawiają, że utrzymuje ona równowagę w tej pozycji.
Te same silniczki, które pozwalają kostce balansować na krawędzi, umożliwiają też na kontrolowany upadek – w dowolnym kierunku. Połączenie tych trzech ruchów – podskoku, balansu i przewrotu – pozwala Cubli chodzić.
Kostka Cubli została opracowana przez znajdujący się w Zurychu ETH Institute for Dynamic Systems and Control. Stanowi ona fragment badań nad systemami z odwróconym wahadłem. Urządzenie to wyróżnia się kompaktowymi rozmiarami (15 x 15 x 15 cm) i możliwością podskakiwania ze stanu spoczynku bez działania zewnętrznych sił.
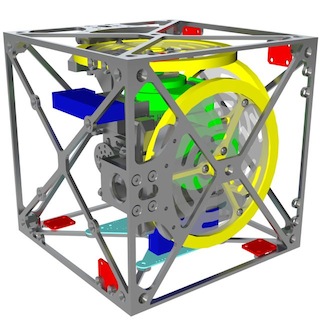
Cubli składa się z aluminiowej ramy – lekkiej, lecz wystarczająco trwałej, aby wytrzymać podskoki i kontrolowane upadki. Wewnątrz ramy znajdują się trzy koła zamachowe oraz płytka z mikrokontrolerem STM32 (rdzeń ARM Cortex-M4, częstotliwość zegara do168 MHz). Za stabilizację odpowiada sześć bloków pozycjonowania (IMU), jeden na każdej ściance, złożonych z żyroskopu i akcelerometru, połączonych z mikrokontrolerem przez magistralę I2C. Kostka zawiera również bezszczotkowy silnik DC o mocy 50 W, który napędza koła oraz kontrolery silnika DC. Silnik oraz mikrokontroler komunikują się za pomocą protokołu CANopen. Zasilanie Cubli jest zapewniane przez zewnętrzne źródło napięcia. Użyte oprogramowanie korzysta z algorytmów estymacji i kontroli i systemu operacyjnego FreeRTOS, a cały kod źródłowy został napisany z użyciem środowiska programistycznego bazującego na platformie Eclipse.
Więcej informacji można znaleźć pod adresem.
 PPTF i ARP S.A. organizują program staży w zakresie mikroelektroniki
PPTF i ARP S.A. organizują program staży w zakresie mikroelektroniki  Ustawa o systemach AI – bezpieczny rozwój sztucznej inteligencji w Polsce
Ustawa o systemach AI – bezpieczny rozwój sztucznej inteligencji w Polsce  Energa Operator z dofinansowaniem 338 mln PLN na stacje ładowania dla ciężarówek
Energa Operator z dofinansowaniem 338 mln PLN na stacje ładowania dla ciężarówek 

![O konkursie organizowanym przez firmę TRUMPF Huettinger i polskie uczelnie techniczne opowiada Alicja Peresada i prof. Jacek Rąbkowski oraz kilkoro nagrodzonych dyplomantów: mgr inż. Jakub Dobosz, inż. Maja Zielińska, dr inż. Jakub Kołodziej, dr inż Weronika Hryniewska-Guzik i dr inż. Grzegorz Bartyzel. Zapraszamy do obejrzenia filmu! [materiał redakcyjny]](https://mikrokontroler.pl/wp-content/uploads/2026/07/TRUMPF-czolowka.png "https://www.youtube.com/watch?v=XkeyLmtLfxo")



