





Czujnik Halla TLE4966V firmy Infineon w praktycznych aplikacjach
Opis matematyczny
Punktem wyjścia jest rysunek 1, na którym przedstawiono geometryczny model ustawienia czujnika. R to promień tarczy magnetycznej, s to odległość od tarczy do detektora, a d to odległość między czujnikami S1 i S2. Dla układu TLE4966V-1K d=1,25 mm. To dzięki tej odległości między sygnałami z czujników występuje przesunięcie fazowe, oznaczane φ. Można je wyliczyć z następującego równania, w którym N oznacza liczbę par biegunów magnetycznych namagnesowanej tarczy:
 (1)
(1)
Jest oczywiste, że im większa jest różnica faz, tym łatwiej prawidłowo określić kierunek obrotu.
Natężenia pola magnetycznego B1(t) i B2(t) w miejscach, gdzie znajdują się czujniki S1 i S2, przy założeniu sinusoidalnej zmienności natężenia pola, można wyrazić następującymi równaniami:
![]() (2)
(2)
Przełączenie czujników Halla nastąpi w chwilach t1 i t2, gdy tylko B1(t1)=Bop1 i B2(t2) = Bop2.
Wykorzystując równanie (2), chwile te można wyrazić jako:
 (3a)
(3a)
 (3b)
(3b)
Wprowadzając dopasowanie magnetyczne BMatch (BMatch = Bop1 – Bop2) otrzymujemy równanie 4:
 (4)
(4)
Tak długo, jak różnica t2 – t1 nie zmienia znaku, obliczony kierunek jest poprawny. Błąd określenia kierunku pojawia się, gdy przekraczana jest granica t2 = t1, która jest najgorszym możliwym przypadkiem, minimalnym warunkiem, jaki musi być spełniony, aby wskazanie było poprawne. Podstawienie do równania (4) φ z równania (1) daje ostateczną postać zależności:
 (5)
(5)
Dla s << s+R można przyjąć, że atan(x)=x, co prowadzi do równania (6):

W równaniu tym, Bop1 jest punktem pracy czujnika, B0 amplitudą natężenia pola magnetycznego w miejscu położenia detektora, BMatch opisuje dopasowanie magnetyczne, N i R określają liczbę par biegunów magnetycznych i promień namagnesowanej tarczy, a d=1,25 mm jest odległością między czujnikami Halla układu TLE4966. Równanie to można rozwiązać numerycznie i wyliczyć niego minimalną amplitudę natężenia pola magnetycznego B0, która jest niezbędna do niezawodnego określania kierunku obrotu dla danej tarczy i geometrii układu magnetycznego.
W związku z poczynionymi założeniami i uproszczeniami modelu, uzyskana wartość B0 jest tylko przybliżeniem, dającym jednak użyteczną wskazówkę, jeśli chodzi o możliwości detekcyjne danego układu magnetycznego. Przy projektowaniu takiego układu należy wziąć pod uwagę pewien margines bezpieczeństwa. Co więcej, nie można zapominać o zmianach właściwości materiału magnetycznego przy wahaniach temperatury. Generalnie, gęstość strumienia magnetycznego spada ze wzrostem temperatury, a szybkość spadku może wynosić do -2000 ppm/K dla magnesów ferrytowych. Przy projektowaniu należy więc wziąć pod uwagę możliwe wahania dla całego zakresu temperatur pracy urządzenia.
Przykład
W tej części artykułu przedstawiony zostanie przykład, ilustrujący zależność pewności informacji o kierunku obrotu od geometrii układu magnetycznego. Wyestymowana zostanie minimalna amplituda natężenia pola magnetycznego Bmin, konieczna do uzyskania prawidłowego określenia kierunku.
W przykładzie użyte zostały następujące parametry:
- Bop = 4,5 mT (najgorszy przypadek wg noty katalogowej układu TLE4966V-1K)
- Bm = +/– 1 mT – dopasowanie magnetyczne (najgorszy przypadek wg noty katalogowej)
- R = 7,5 mm – promień tarczy magnetycznej
- s = 2,5 mm – odległość między tarczą i elementem defekującym
- d = 1,25 mm – odległość między czujnikami Halla w układzie TLE4966V-1K
Rozważone zostały trzy różne liczby par biegunów magnetycznych (N = 1, 2, 3). Rozwiązane zostało równanie (5) i na jego podstawie określono punkt przecięcia zera (t1 = t2). Punkt ten pozwala znaleźć natężenie pola Bmin niezbędne do prawidłowego określenia kierunku obrotu (rysunek 5, rysunek 6, rysunek 7). Dla każdej z trzech wersji tarczy magnetycznej wykreślone zostały trzy krzywe dla BMatch = 1 mT, 0 mT i -1 mT.
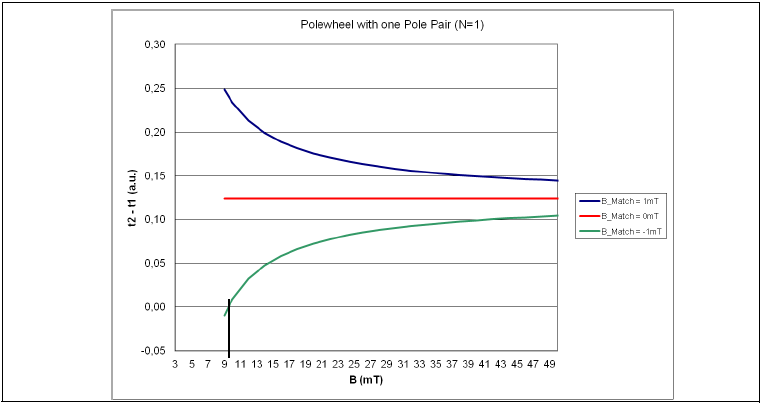
Rys. 5. Tarcza magnetyczna z N = 1, minimalne wymagane natężenie pola Bmin = 9 mT dla t2 – t1 = 0
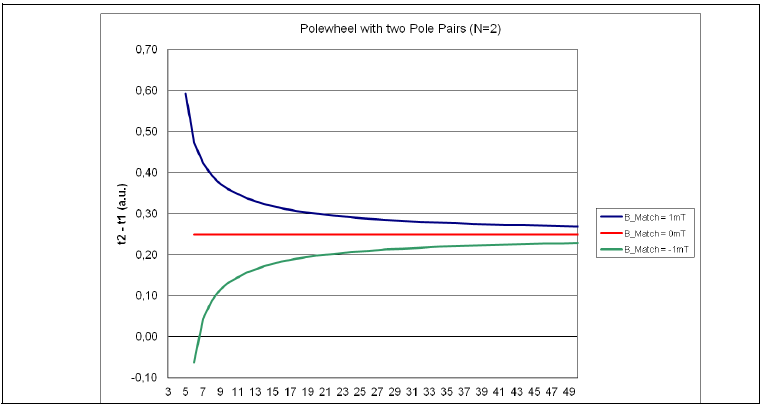
Rys. 6. Tarcza magnetyczna z N = 2, minimalne wymagane natężenie pola Bmin = 7 mT dla t2 – t1 = 0
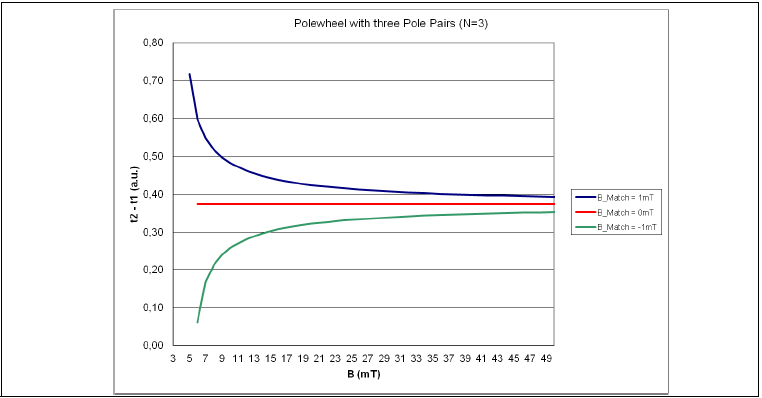
Rys. 7. Tarcza magnetyczna z N = 3, minimalne wymagane natężenie pola Bmin = 6 mT dla t2 – t1 = 0
Przy idealnym dopasowaniu magnetycznym (Bm = 0 mT) przełączenie (t2 -–t1) jest niezależne od natężenia pola B. W każdym przypadku otrzymana informacja o kierunku obrotu jest poprawna. To samo można powiedzieć dla Bm > 0 mT. Tylko jeśli dopasowanie jest ujemne może się pojawić błąd określenia kierunku obrotu. Wartość natężenia pola magnetycznego dla punktu przecięcia zera odpowiada minimalnej wartości koniecznej do uzyskania prawidłowego wskazania kierunku obrotu w ogóle. Dla wartości niższych możliwe jest uzyskanie wskazania błędnego. Jak widać, wymagane natężenie pola spada ze wzrostem liczby par biegunów magnetycznych. Dla tarczy magnetycznej z trzema parami biegunów (rysunek 7) wynosi ono 6 mT, a dla jednej pary biegunów wymagane jest natężenie ok. 9 mT. Uzyskiwane wyniki są znacznie lepsze w porównaniu z układem TLE4966V, co jest efektem dużo węższej specyfikacji parametru BMatch.
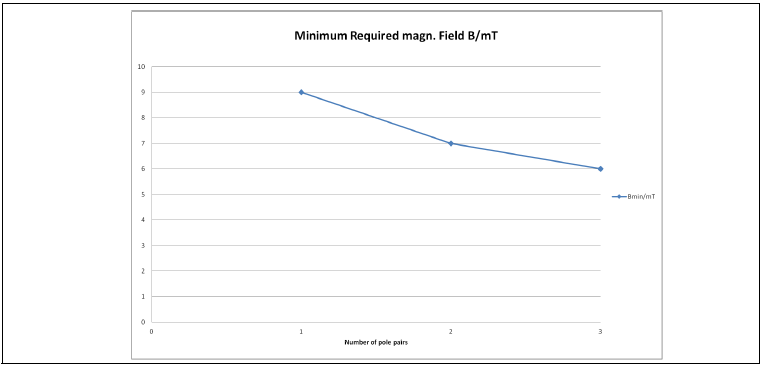
Rys. 8. Minimalne natężenie pola magnetycznego dla różnej liczby par biegunów magnetycznych przy Bm = -1 mT.
Podsumowanie
Podane wcześniej równania (5) i (6) można wykorzystać do określenia czy użyte układy magnetyczne są wystarczająco dobre, aby niezawodnie podawać prawidłową informację o kierunku obrotu. Znając geometrię tarczy magnetycznej i jej parametry (N, R, s) oraz biorąc pod uwagę najgorsze akceptowalne wartości z noty katalogowej (Bop, BMatch), można obliczyć minimalne wymagane natężenie pola magnetycznego Bmin w miejscu położenia czujników. Jeśli wartość ta jest wyższa, niż natężenie pola zapewniane przez używaną tarczę magnetyczną, możliwe jest pojawienie się fałszywych wskazań kierunku obrotu. W takich przypadkach warto zmienić układ magnetyczny, aby zwiększyć odporność na błędy. W zawiązku z tym, że w podanych równaniach użyto przybliżeń i uproszczeń, konieczne jest też uwzględnienie marginesu bezpieczeństwa, celem zapewnienia bezproblemowej pracy w różnych warunkach.
Artykuł powstał w oparciu o tłumaczenie noty aplikacyjnej firmy Infineon Technologies pod tytułem „Magnetic Circuit Design for Correct Direction Detection of TLE4966V”.
 Fotowoltaika perowskitowa: od wydajności laboratoryjnej do masowej komercjalizacji
Fotowoltaika perowskitowa: od wydajności laboratoryjnej do masowej komercjalizacji  Czy kamery termowizyjne pokazują nam całą prawdę?
Czy kamery termowizyjne pokazują nam całą prawdę?  Generowanie ujemnego napięcia odniesienia – eksperymenty z zestawem ADALM2000
Generowanie ujemnego napięcia odniesienia – eksperymenty z zestawem ADALM2000 

![O konkursie organizowanym przez firmę TRUMPF Huettinger i polskie uczelnie techniczne opowiada Alicja Peresada i prof. Jacek Rąbkowski oraz kilkoro nagrodzonych dyplomantów: mgr inż. Jakub Dobosz, inż. Maja Zielińska, dr inż. Jakub Kołodziej, dr inż Weronika Hryniewska-Guzik i dr inż. Grzegorz Bartyzel. Zapraszamy do obejrzenia filmu! [materiał redakcyjny]](https://mikrokontroler.pl/wp-content/uploads/2026/07/TRUMPF-czolowka.png "https://www.youtube.com/watch?v=XkeyLmtLfxo")



