





[KROK-PO-KROKU] Bootloader dla zestawu FREEboard – jak z niego korzystać
Podczas tej operacji będzie widoczne okienko z postępem zapisywania pamięci (rysunek 3), a na koniec zostanie wyświetlona komunikat końcowy (rysunek 4).
Z programu wychodzimy poleceniem:
J-Link>q
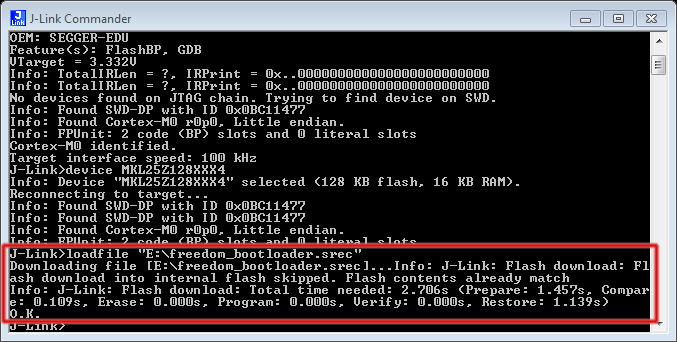
Rys. 4. Informacja o zakończeniu programowania
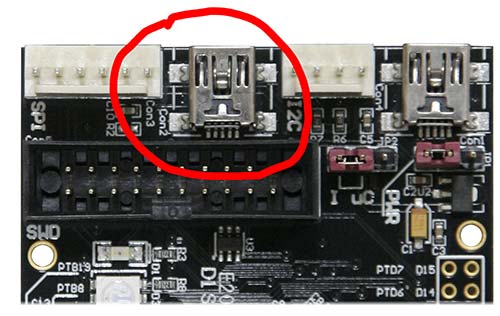
Fot. 5. Umieszczenie złącza USB Con2 na płytce FREEboard (jest obsługiwane przez bootloader i służy do modyfikowania oprogramowania w pamięci Flash mikrokontrolera)
Odłączamy zestaw FREEboard od komputera i programatora, a następnie podłączamy go ponownie do komputera, ale tym razem poprzez złącze CON2 (fotografia 5). W menedżerze urządzeń systemu powinna wyświetlić się informacja o wykryciu urządzenia interfejsu HID – żadne dodatkowe sterowniki nie są wymagane (rysunek 6).
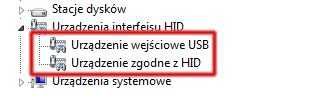
Rys. 6. Zaprogramowany układ jest wykrywany w systemie jako urządzenie USB HID
Bootloader z projektu
Inna metoda zapisania bootloadera w pamięci Flash mikrokontrolera polega na kompilacji projektu-bootloadera zawartego w pakiecie KINETIS Bootloader wraz z otwartymi kodami źródłowymi, a następnie wgraniu otrzymanego pliku binarnego z poziomu tego samego środowiska programistycznego. Zaletą takiego rozwiązania jest możliwość dostrojenia parametrów bootloadera do własnych potrzeb.
Projekt przygotowany w środowisku IAR Embedded Workbench (jest to jedyne środowisko w jakim przygotowane są projekty omawianego pakietu) i najbardziej odpowiadający naszej platformie sprzętowej znajduje się w podkatalogu targets/MKL25Z4/ (plik bootloader.eww). Po jego otwarciu, w sekcji Workspace środowiska wybieramy „freedom_bootloader – Debug” i z menu kontekstowego ustawiamy jako aktywny (Set as Active). Przed kompilacją możemy ustawić najważniejsze opcje bootloadera – makrodefinicje w pliku bootloader_config.h (rysunek 7) – m.in. czas oczekiwania bootloadera na pierwsze połączenie się z nim przez dowolny obsługiwany układ komunikacyjny (DEFAULT_PERIPHERAL_DETECTION_TIMEOUT) lub prędkość transmisji i numer interfejsu UART (TERMINAL_BAUD i TERM_PORT_NUM).
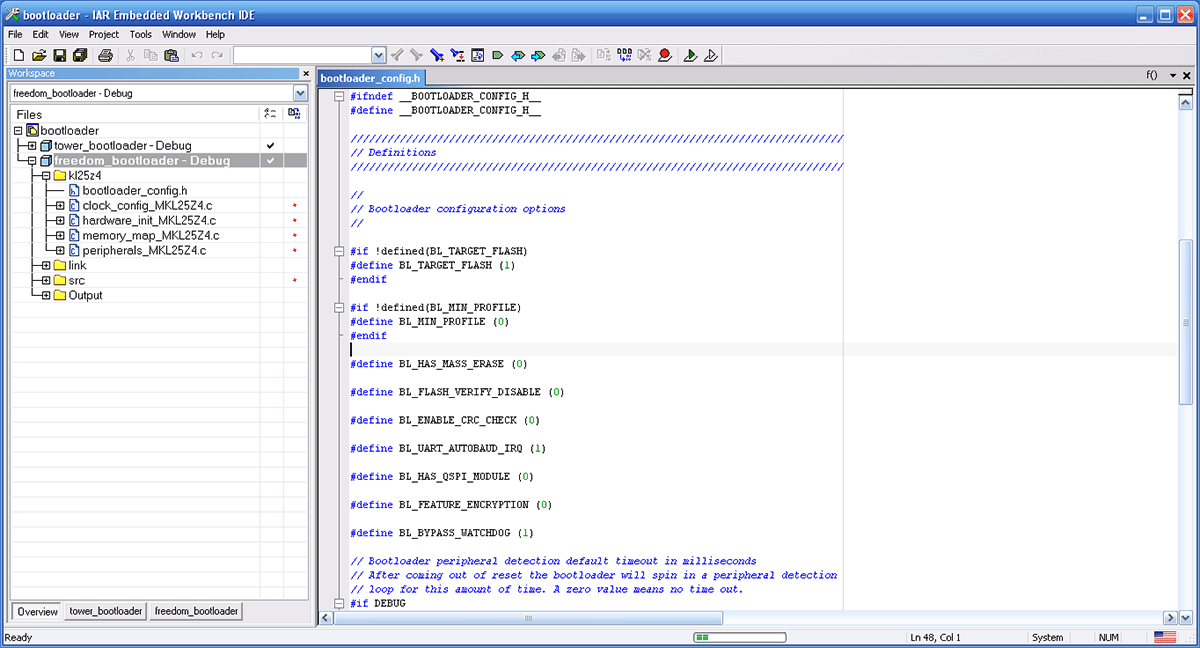
Rys. 7. Projekt bootloadera w środowisku IAR Embedded Workbench
Ze wspomnianego menu kontekstowego kompilujemy projekt (element Make), a następnie konfigurujemy programator/debuger (element Options…) wybierając w zakładce Debugger/Setup interfejs J-Link (rysunek 8). Wygenerowany plik binarny wgrywamy do pamięci mikrokontrolera poprzez wybranie z menu środowiska Project ? Download ? Download active application, po czym układ jest resetowany i rozpoczyna się wykonywanie programu.
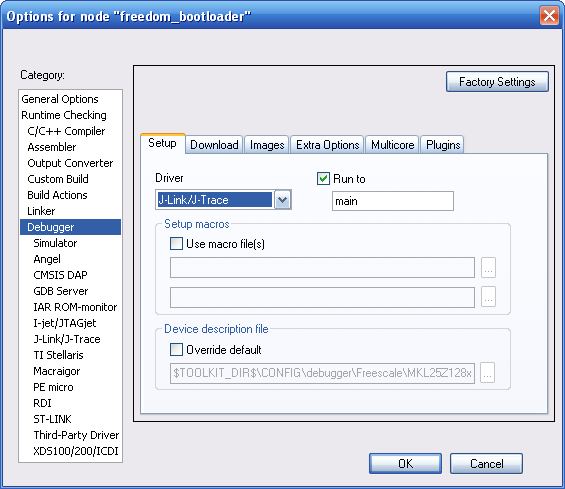
Rys. 8. Konfiguracja programatora/debugera J-Link
 Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle
Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle  Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników
Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników  AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii
AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii 




