





[ARDUINO] Oko Cyklopa – ultradźwiękowy „radar” do lokalizacji obiektów
List. 4. Fragment programu sortujący wyniki pomiaru
if(A<=B)
{
if(A<=C)
{
A;
}
else
{
C;
}
}
else
{
if(B<=C)
{
B;
}
}
Podczas analizy schematu napotkałem kluczowy problem. Pierwotnie urządzenie miało być zasilane z wykorzystaniem stabilizatora napięcia zamontowanego na płytce startowej Arduino Leonardo. Jednak wykorzystany w projekcie silnik serwo potrzebował większej mocy niż mógł dostarczyć stabilizatora. Powodowało to znaczne spadki napięcia w układzie, co skutkowało zerowaniem się mikrokontrolera. Aby zabezpieczyć układ przed spadkami napięcia, wykorzystałem układ zasilający step-down, który stał się równoległym źródłem napięcia dla silnika serwo oraz Arduino. Na rysunku 4 znajduje się ostateczny schemat urządzenia.
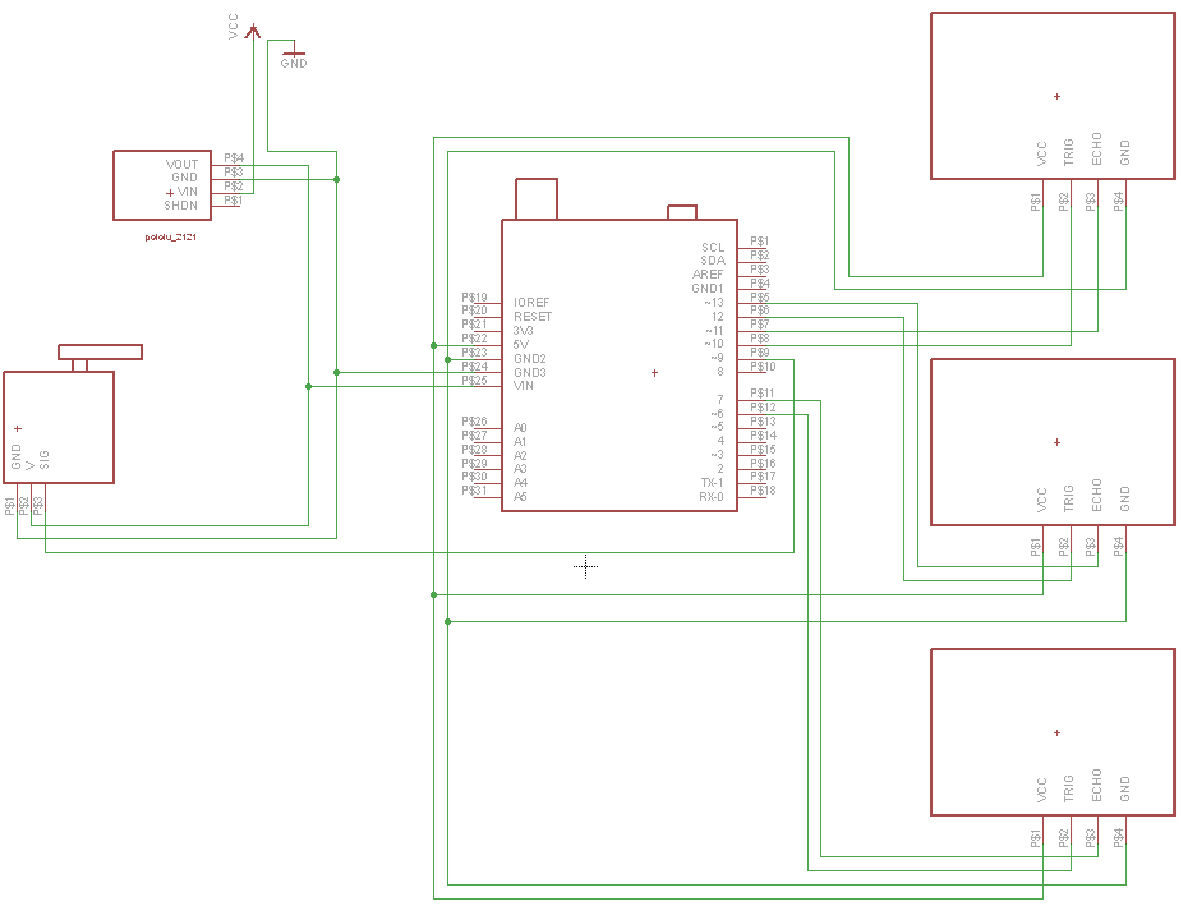
Rys. 4. Schemat elektryczny finalnego urządzenia
Pamiętając o estetycznym programowaniu zostały przygotowane bloki funkcyjne realizujące główne zadania. Pierwszy realizuje pobranie oraz analizę danych z czujników ultradźwiękowych (listing 5 i listing 6), natomiast drugi blok główny kieruje pracą serwomechanizmu (listing 7).
List. 5. Fragment programu odpowiedzialny za pomiar odległości
void pomiar_odleglosci ()
{
// impuls 10 uS inicjalizujacy - patrz dokumentacja
digitalWrite(TX1, HIGH);
delayMicroseconds(10);
digitalWrite(TX1, LOW);
TIME1 = pulseIn(RX1, HIGH);
digitalWrite(TX2, HIGH);
delayMicroseconds(10);
digitalWrite(TX2, LOW);
TIME2 = pulseIn(RX2, HIGH);
digitalWrite(TX3, HIGH);
delayMicroseconds(10);
digitalWrite(TX3, LOW);
TIME3 = pulseIn(RX3, HIGH);
}
List. 6. Fragment programu sortujący wartości odczytane przez czujniki
if(TIME1<=TIME2)
{
if (TIME1<=TIME3)
{
dx=5;
}
else
{
dx=15;
}
}
else
{
if(TIME2<=TIME3)
{
dx=-15;
}
}
List. 7. Pętla główna programu
void loop()
{
pomiar_odleglosci();
// szerokość odbitego impulsu w uS podzielone przez
// 58 to odleglosc w cm - patrz dokumentacja
Serial.print(" Czujnik 1: ");
TIME1=TIME1/58;
Serial.print(TIME1);
Serial.print(" Czujnik 2: ");
TIME2=TIME2/58;
Serial.print(TIME2);
Serial.print(" Czujnik 3: ");
TIME3=TIME3/58;
Serial.println(TIME3);
if(TIME1<=TIME2)
{
if (TIME1<=TIME3)
{
dx=0;
}
//w przypadku śledzenia obiektu przez oko frontowe brak reakcji
else
{
dx=15;
}
//w przypadku wykrycia obiektu przez oko prawe obrót w prawo
}
else
{
if(TIME2<=TIME3) { dx=-15; } //w przypadku wykrycia obiektu przez oko lewe obrót w lewo } pos=pos+dx; //zabezpieczenie przed osiągnięciem przez silnik wartości skrajnych if(pos>170)
{
pos=170;
}
else
{
if(pos<10)
{
pos=10;
}
}
Serial.println(pos);
myservo.write(pos); // ustawienie silnika serwo w pozycji "pos"
delay(70);
}
Opisywany projekt jest przeznaczony przede wszystkim dla początkujących oraz średnio-zaawansowanych adeptów robotyki. Pozwala zdobyć doświadczenie w dziedzinie wykorzystania czujników ultradźwiękowych w różnych konfiguracjach portów. Realizując ten projekt (fotografia 5) zyskujemy umiejętności wykorzystania silników serwo, które dzięki swej precyzji często są obowiązkowym punktem kolejnych projektów.
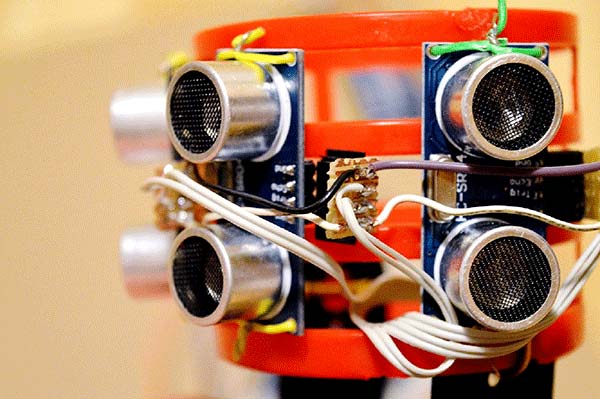
Fot. 5. Widok zmontowanego urządzenia
 Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle
Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle  Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników
Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników  AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii
AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii 



