





[DIY] Robot MiniSumo – tajniki konstrukcji
Sterowanie silnikami
Do sterowania silnikami użyłem sterownik silników Arduino moduł L298. Jako że w konstrukcji używam dwóch silników DC, sterowanie tego typu będę opisywał. Sterownik podczas pracy korzysta z 8 pinów płyty głównej (funkcje jak niżej).
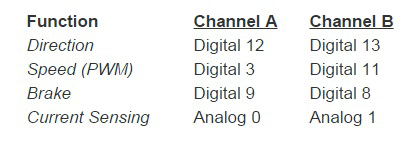
Nie będziemy korzystać z pomiarów prądu – wyjścia Analog 0 i Analog 1, jednak należy pamiętać, że piny te są wykorzystywane przez sterownik w czasie jego pracy i nie możemy z nich skorzystać bez uprzedniej zmiany konfiguracji sterownika(np. podpięcie tam czujnika da nieprawidłowe pomiary). Piny digital 9 i 8 wykorzystane będą tylko w małym stopniu. Ustawię je jako wyścia i wymuszę na nich stan niski, co oznacza wyłączanie hamowania odpowiednio w kanale A i B.
Największą uwagę należy skupić na pinach digital 12 i 13 odpowiedzialnych za wybór kierunku i digital 3 oraz 11 odpowiedzialne za ustawienie prędkości.
Przy wyborze kierunku najpierw trzeba skonfigurować piny 12 i 13 jako wyjścia, później wymusząjąc stan wysoki lub niski sterujemy kierunkiem pracy silnika.
Sterowanie prędkością odbywa się modulacją szerokości impulsów PWM, po prostu wpisujemy wartość z zakresu 0 – 255 co odpowiada zakresowi prędkości od postoju do prędkości maksymalnej.
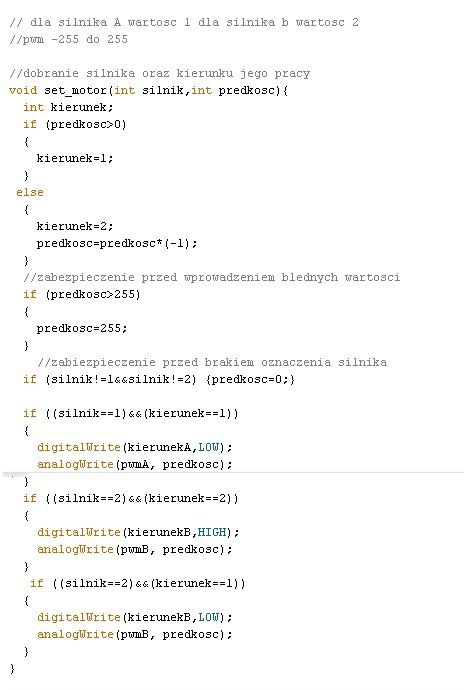
Poniżej funkcja do sterowania silnikami:
Algorytm
Przed napisaniem programu warto stworzyć algorytm. Konieczne jest ustalenie priorytetu – które odczyty czujników są ważniejsze. W naszym przypadku ważniejsze jest, żeby robot utrzymał się na macie, niż żeby atakował przeciwnika, więc to czujniki odbiciowe będą miały wyższy priorytet. Przykład użyty w projekcie pokazano na rysunku 4.
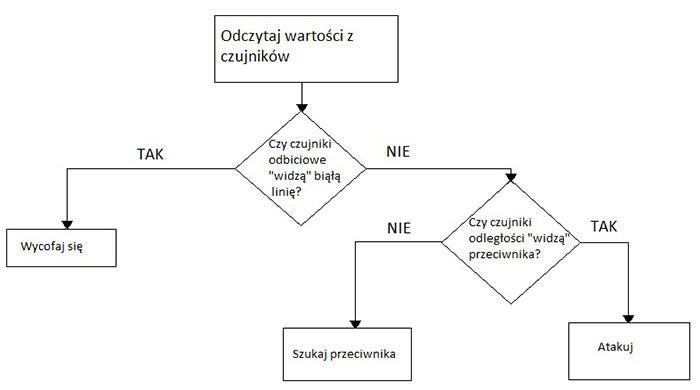
Rys. 4. Algorytm działania robota opisanego w artykule
Końcowy program
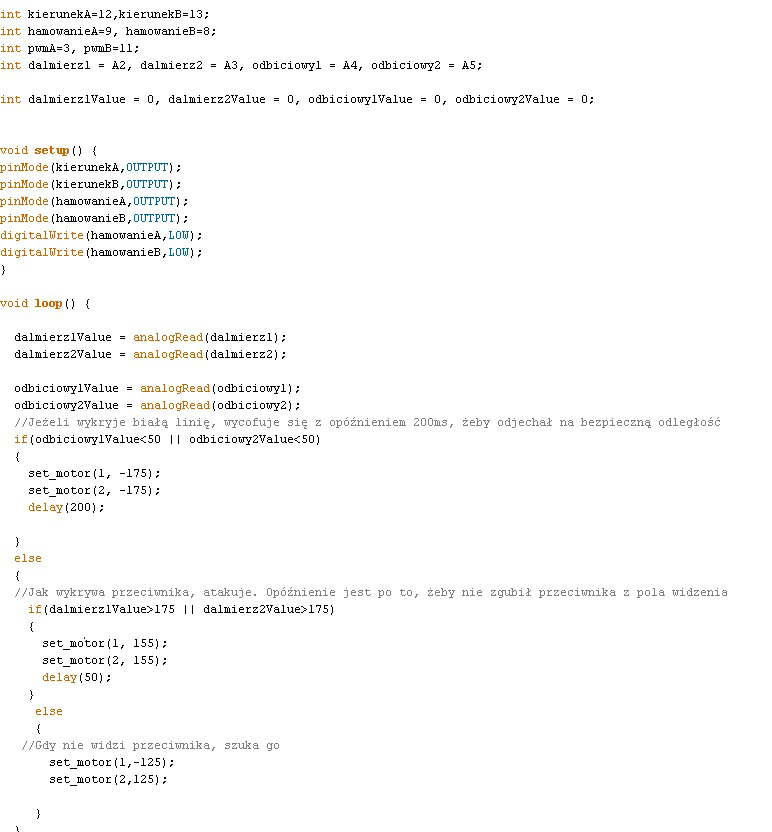
Mając gotowy algorytm, funkcję do sterowania silników i wiedze, jak interpretować wartości z czujników bez większych problemów można przystąpić do napisania kompletnego programu.
Tak wygląda cały program, napisany w środowisku programistycznym Arduino:
 Fotowoltaika perowskitowa: od wydajności laboratoryjnej do masowej komercjalizacji
Fotowoltaika perowskitowa: od wydajności laboratoryjnej do masowej komercjalizacji  Czy kamery termowizyjne pokazują nam całą prawdę?
Czy kamery termowizyjne pokazują nam całą prawdę?  Generowanie ujemnego napięcia odniesienia – eksperymenty z zestawem ADALM2000
Generowanie ujemnego napięcia odniesienia – eksperymenty z zestawem ADALM2000 

![O konkursie organizowanym przez firmę TRUMPF Huettinger i polskie uczelnie techniczne opowiada Alicja Peresada i prof. Jacek Rąbkowski oraz kilkoro nagrodzonych dyplomantów: mgr inż. Jakub Dobosz, inż. Maja Zielińska, dr inż. Jakub Kołodziej, dr inż Weronika Hryniewska-Guzik i dr inż. Grzegorz Bartyzel. Zapraszamy do obejrzenia filmu! [materiał redakcyjny]](https://mikrokontroler.pl/wp-content/uploads/2026/07/TRUMPF-czolowka.png "https://www.youtube.com/watch?v=XkeyLmtLfxo")



