





[RADAR NA STM32] Demonstrator zjawiska Dopplera na zestawie STM32F429I-DISCOVERY
W artykule przedstawiono realizację demonstratora zjawiska Dopplera na bazie zestawu ewaluacyjnego STM32F429I-DISCO oraz modułu radarowego HB-100. Artykuł jet konstrukcyjnym komentarzem do jednego z naszych newsów, przygotowanym przez naszego czytelnika.
W artykule opisano ideę projektu oraz zaprezentowano schemat układu. Pokazano również przykładowe stanowisko pomiarowe wykorzystane podczas testów urządzenia.
Zjawisko Dopplera
Efekt Dopplera jest powszechnie znanym zjawiskiem. W ogólności, polega na zmianie częstotliwości fali, względem poruszającego się obiektu. Zjawisko często szkodliwe (np. w komunikacji bezprzewodowej w systemach wąskopasmowych) znalazło swoje zastosowanie w technice radarowej. Analizując w dziedzinie częstotliwości sygnał odbity od poruszającego się obiektu możliwe jest określenie prędkości, z jaką ten obiekt się porusza. Dla przykładu radaru monostatycznego (lub quasi-monostatycznego) częstotliwość dopplerowska wyrażana jest zależnością:
![]()
Którą można uprościć do warunku (przy założeniu, że obiekt porusza się bezpośrednio na wprost anten(y) radaru – rysunek 1):
![]()
gdzie:
? – długość fali
? – kąt między wektorem prędkości obiektu a radarem
fd – częstotliwość Dopplera
vr – prędkość względna (lub radialna)
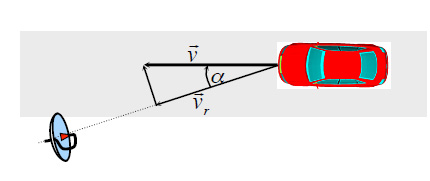
Rys. 1. Zależność prędkości względnej od kierunku poruszania
Użyte moduły
1. Moduł radarowy HB-100
Jest to sensor mikrofalowy działający w paśmie X na częstotliwości f=10,525 GHz. Zawiera lokalny generator sygnału wysokiej częstotliwości, mieszacz oraz dwie pary anten mikropaskowych – para nadawcza i para odbiorcza (rysunek 2).
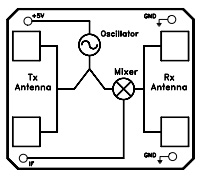
Rys. 2. Budowa modułu HB-100
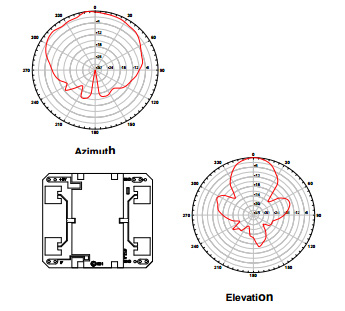
Rys. 3. Charakterystyki promieniowania anten
Moduł zasilany jest napięciem 5V. Sygnał wyjściowy podawany jest na pin IF, przedstawiony w lewym dolnym rogu na rysunku 2. Sygnał ten jest wynikiem mieszania (odejmowania) sygnału generowanego w module i sygnału odebranego przez anteny odbiorcze. W wyniku zjawiska Dopplera opisanego w punkcie 2, poruszający się obiekt powoduje, że odebrana częstotliwość jest mniejsza lub większa od częstotliwości generowanej. Za sprawą mieszacza sygnał sprowadzany jest w pasmo podstawowe, gdzie bez problemów może być poddany analizie. W tym przypadku uzyskuje się informacje na temat względnej prędkości. Zarówno obiekt poruszający się w kierunku radaru z prędkością v, jak i oddalający się od radaru z taką sama prędkością dadzą w efekcie taki sam sygnał na wyjściu układu. Moduł nie daje możliwości weryfikacji, czy poruszający się obiekt przybliża się czy oddala. Możliwości takie dają droższe i bardziej rozbudowane moduły.
2. Wzmacniacz
Schemat wzmacniacza został oparty o przykład zamieszczony w dokumentacji modułu HB-100 (rysunek 4). Różnica polega na zmianie wzmacniacza operacyjnego wykorzystywanego w układzie. Producent zaprojektował układ dostosowany do nieco wyższych częstotliwości niż te wymagane w projekcie. Używany układ to LM358N. Ponadto wykorzystano tylko jeden stopień wzmacniacza (rysunek 5), a dodatkowe wzmocnienie może być zaimplementowane programowo w mikrokontrolerze. Możliwe jest także bezpośrednie podanie sygnału IF na wejście analogowe mikrokontrolera, jednak sygnał ten jest bardzo słaby (rzędu kilku mikrowoltów) więc jego poprawna analiza może być utrudniona. Dodatkowo układ wzmacniacza pełni rolę filtru, co może ułatwić obróbkę sygnału.
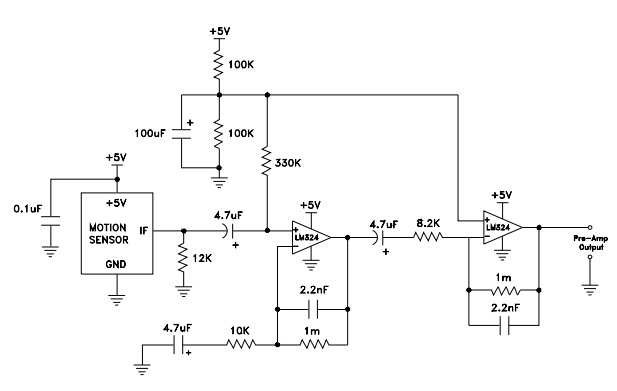
Rys. 4. Schemat zaproponowany przez producenta
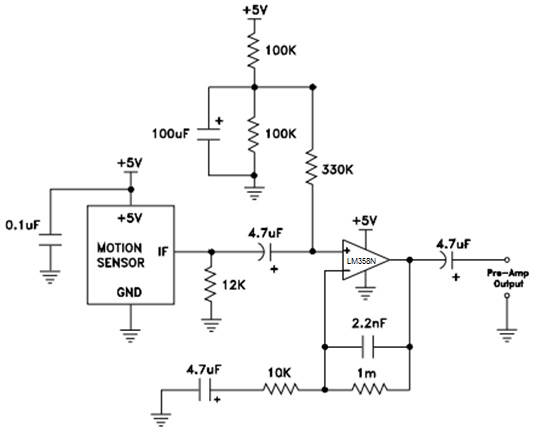
Rys. 5. Wzmacniacz użyty w projekcie
3. Zestaw ewaluacyjny STM32F429I-DISCO
Rosnąca popularność evalboardów z mikrokontrolerami rodziny STM32 i coraz szersza oferta pozwala na realizację różnych ciekawych projektów. Ze względu na niską cenę i w zupełności wystarczające parametry zdecydowano się na użycie zestawu STM32F429I-DISCO (fotografia 6).
Fot. 6. Zestaw STM32F429I-DISCO
Mikrokontroler odpowiedzialny jest za próbkowanie sygnału, obliczenie wartości napięcia oraz demonstrację wyników na wyświetlaczu TFT. Szczegółowy opis zestawu oraz jego funkcji dostępny jest w Internecie.
 Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle
Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle  Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników
Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników  AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii
AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii 






