





Renesas Synergy – pierwszy projekt w e2studio
Ustawienia taktowania są zapisane w pliku bsp_clock_cfg.h – listing 6.
List. 6. Plik nagłówkowy bsp_clock_cfg.h
/* generated configuration header file - do not edit */ #ifndef BSP_CLOCK_CFG_H_ #define BSP_CLOCK_CFG_H_ #define BSP_CFG_XTAL_HZ (24000000) /* XTAL 24000000Hz */ #define BSP_CFG_PLL_SOURCE (CGC_CLOCK_MAIN_OSC) /* PLL Src: XTAL */ #define BSP_CFG_HOCO_FREQUENCY (0) /* HOCO 16MHz */ #define BSP_CFG_PLL_DIV (CGC_PLL_DIV_2) /* PLL Div /2 */ #define BSP_CFG_PLL_MUL (20.0) /* PLL Mul x20.0 */ #define BSP_CFG_CLOCK_SOURCE (CGC_CLOCK_PLL) /* Clock Src: PLL */ #define BSP_CFG_ICK_DIV (CGC_SYS_CLOCK_DIV_1) /* ICLK Div /1 */ #define BSP_CFG_PCKA_DIV (CGC_SYS_CLOCK_DIV_2) /* PCLKA Div /2 */ #define BSP_CFG_PCKB_DIV (CGC_SYS_CLOCK_DIV_4) /* PCLKB Div /4 */ #define BSP_CFG_PCKC_DIV (CGC_SYS_CLOCK_DIV_4) /* PCLKC Div /4 */ #define BSP_CFG_PCKD_DIV (CGC_SYS_CLOCK_DIV_2) /* PCLKD Div /2 */ #define BSP_CFG_SDCLK_OUTPUT (1) /* SDCLKout On */ #define BSP_CFG_BCK_DIV (CGC_SYS_CLOCK_DIV_2) /* BCLK Div /2 */ #define BSP_CFG_BCLK_OUTPUT (2) /* BCK/2 */ #define BSP_CFG_UCK_DIV (CGC_USB_CLOCK_DIV_5) /* UCLK Div /5 */ #define BSP_CFG_FCK_DIV (CGC_SYS_CLOCK_DIV_4) /* FCLK Div /4 */ #endif /* BSP_CLOCK_CFG_H_ */
Istnieje też możliwość debugowania konfiguracji projektu. Zamiast Debug As klikamy na Debug Configurations i w nim na zakładkę Debug – rysunek 18.
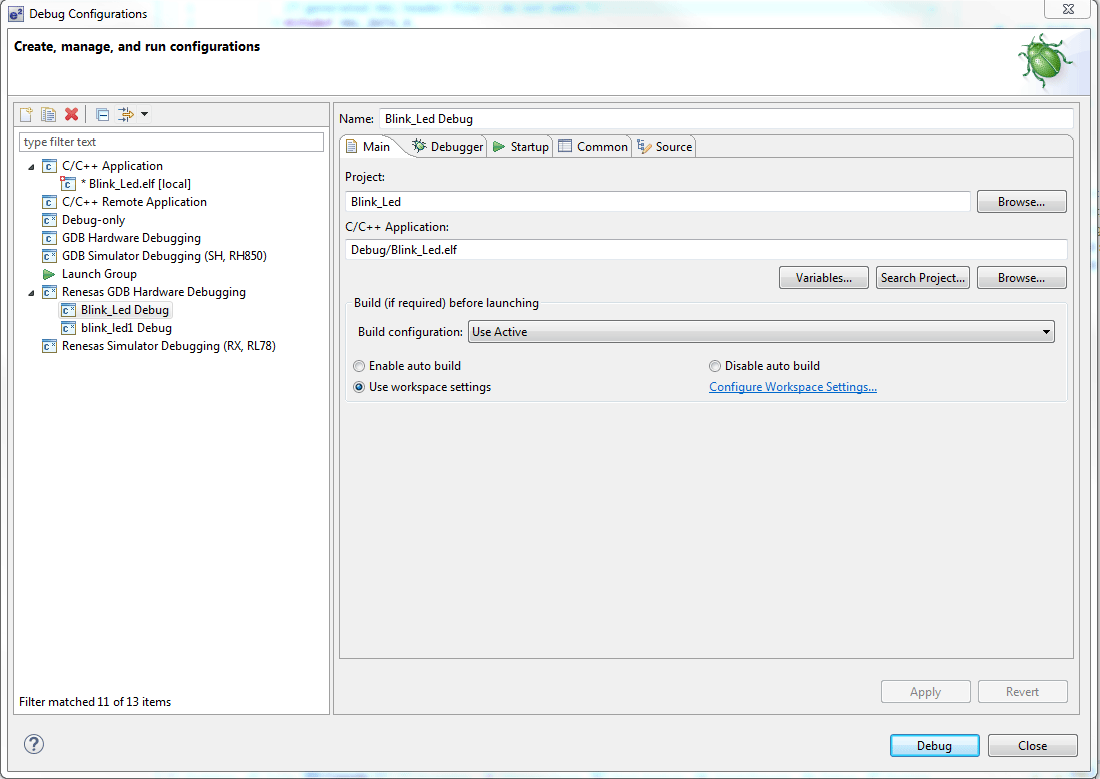
Rys. 18. Okno konfiguracji debugowania
Po kliknięciu na przycisk Debug otwiera się okno z plikiem startup_S7G2.c.
Na koniec pokażę jak dodać nowy komponent do konfiguracji projektu. Będzie to sprzętowy timer GPT odliczający opóźnienia. Ma on zastąpić możliwość programowego odliczania opóźnień w naszym projekcie. Jak wiemy dodawanie komponentów może by wykonywane w zakładce Threads (rysunek 19).
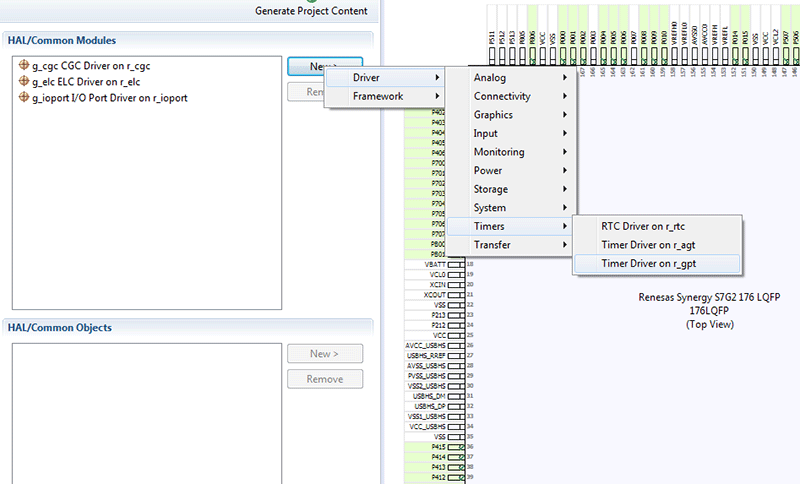
Rys. 19. Dodanie drivera GPT
Po dodaniu drivera w modułach projektu pojawia się g_timer Timer Driver on r_gpt (rysunek 20), który trzeba skonfigurować w zakładce Properties – rysunek 21.

Rys. 20. Po dodaniu drivera w modułach żywanych w projekcie pojawia się g_timer Timer Driver on r_gpt
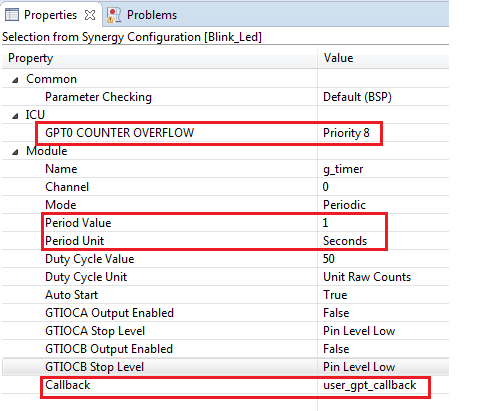
Rys. 21. Konfiguracja drivera GPT
Najpierw konfigurujemy przerwania od GPT0 zgłaszane przy przepełnieniu licznika – rysunek 22. Potem we właściwościach licznika (zakładka Threads) wpisujemy:
- Period value=1,
- period unit = seconds i
- Callback = user_gpt_callback.
Tak skonfigurowany timer przepełnia się i zgłasza przerwanie co 1 s.
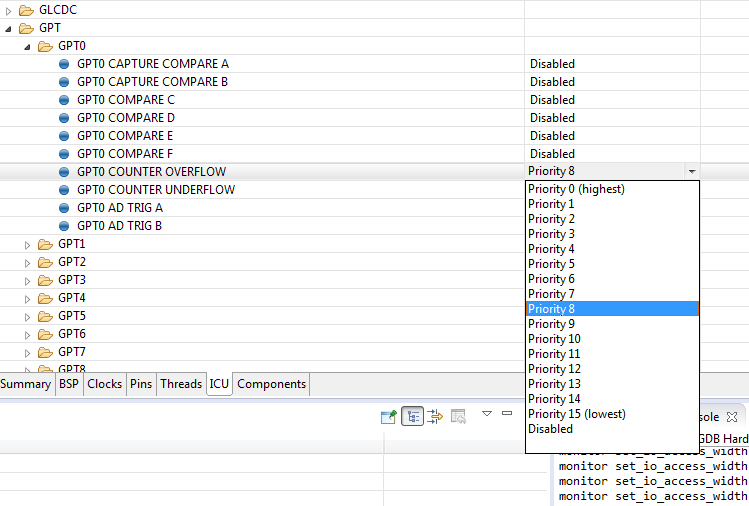
Rys. 22. Konfigurowanie przerwań od drivera GPT0
Teraz na podstawie nowej konfiguracji Synergy Configurator wygeneruje nowe pliki konfiguracyjne po kliknięciu na Generate Project Content. W pliku hal_data.h konfigurator dopisał definicje pokazane na listingu 7.
List. 7. Zmodyfikowany fragment pliku hal_data.h
extern const timer_instance_t g_timer; #if TIMER_ON_GPT_CALLBACK_USED_g_timer void user_gpt_callback(timer_callback_args_t * p_args); #endif
W pliku hal_data.c konfigurator dopisał definicje konfiguracji licznika – listing 8.
List. 8. zmodyfikowany fragment pliku hal_data.c
#pragma weak user_gpt_callback user_gpt_callback_internal
static timer_ctrl_t g_timer_ctrl;
static const timer_cfg_t g_timer_cfg =
{.mode = TIMER_MODE_PERIODIC,.period = 1,.unit = TIMER_UNIT_PERIOD_SEC,.duty_cycle = 50,.duty_cycle_unit =
TIMER_PWM_UNIT_RAW_COUNTS,
.channel = 0,.autostart = true,.p_callback = user_gpt_callback,.p_context = &g_timer,.p_extend = &g_timer_extend };
/* Instance structure to use this module. */
const timer_instance_t g_timer =
{.p_ctrl = &g_timer_ctrl,.p_cfg = &g_timer_cfg,.p_api = &g_timer_on_gpt };
#if TIMER_ON_GPT_CALLBACK_USED_g_timer
/*******************************************************************************************************************//**
* @brief This is a weak example callback function. It should be overridden by defining a user callback function
* with the prototype below.
* - void user_gpt_callback(timer_callback_args_t * p_args)
*
* @param[in] p_args Callback arguments used to identify what caused the callback.
**********************************************************************************************************************/
void user_gpt_callback_internal(timer_callback_args_t * p_args);
void user_gpt_callback_internal(timer_callback_args_t * p_args)
{
/** Do nothing. */
SSP_PARAMETER_NOT_USED(p_args);
}
 Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle
Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle  Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników
Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników  AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii
AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii 



