





[PROJEKT] Romi Chassis – montaż oraz sterowanie silnikami
W artykule jest zaprezentowane podwozie Romi Chassis firmy Pololu oraz sposób jego montażu. Zwieńczeniem dzieła będzie zamontowanie elektroniki sterującej silnikami oraz wykonanie pierwszych jazd takim pojazdem.
Do realizacji projektu użyto:
- Podwozie Romi Chassis Kit – Czarne lub czerwone
- Moduł zasilania wraz z sterownikiem silników dla podwozia Romi Chassis
- KAmduino Uno
- Kulka podporowa czarna lub czerwona (opcjonalnie)
- 6 baterii AA
- Przewody męsko-żeńskie
W zestawie Romi Chassis Kit otrzymujemy elementy pokazane na rysunku 1.

Rysunek 1. Elementy znajdujące się w zestawie Romi Chassis Kit
Zestaw zawiera podstawę, mocowania silników, silniki prądu stałego z przekładnią 120:1 wraz z pasującymi do nich kołami o wymiarach 70 x 8 mm oraz blaszki do pojemnika na baterie. Znajdziemy tu również jedną kulkę podporową – w podstawie jest miejsce na zamontowanie drugiej kulki podporowej, warto się w nią zaopatrzyć ponieważ znacznie poprawia ona stabilność podstawy.
Przed przystąpieniem do montażu naszego podwozia musimy przylutować odpowiednie złącza do modułu zasilania wraz z sterownikiem silników oraz płytki z enkoderami dla silników. Najpierw zajmiemy się płytkami z enkoderami. Jeżeli planujemy używać ich z modułem zasilania wraz z sterownikiem silników dla podwozia Romi Chassis, musimy je przylutować jak to pokazano na rysunku 2.
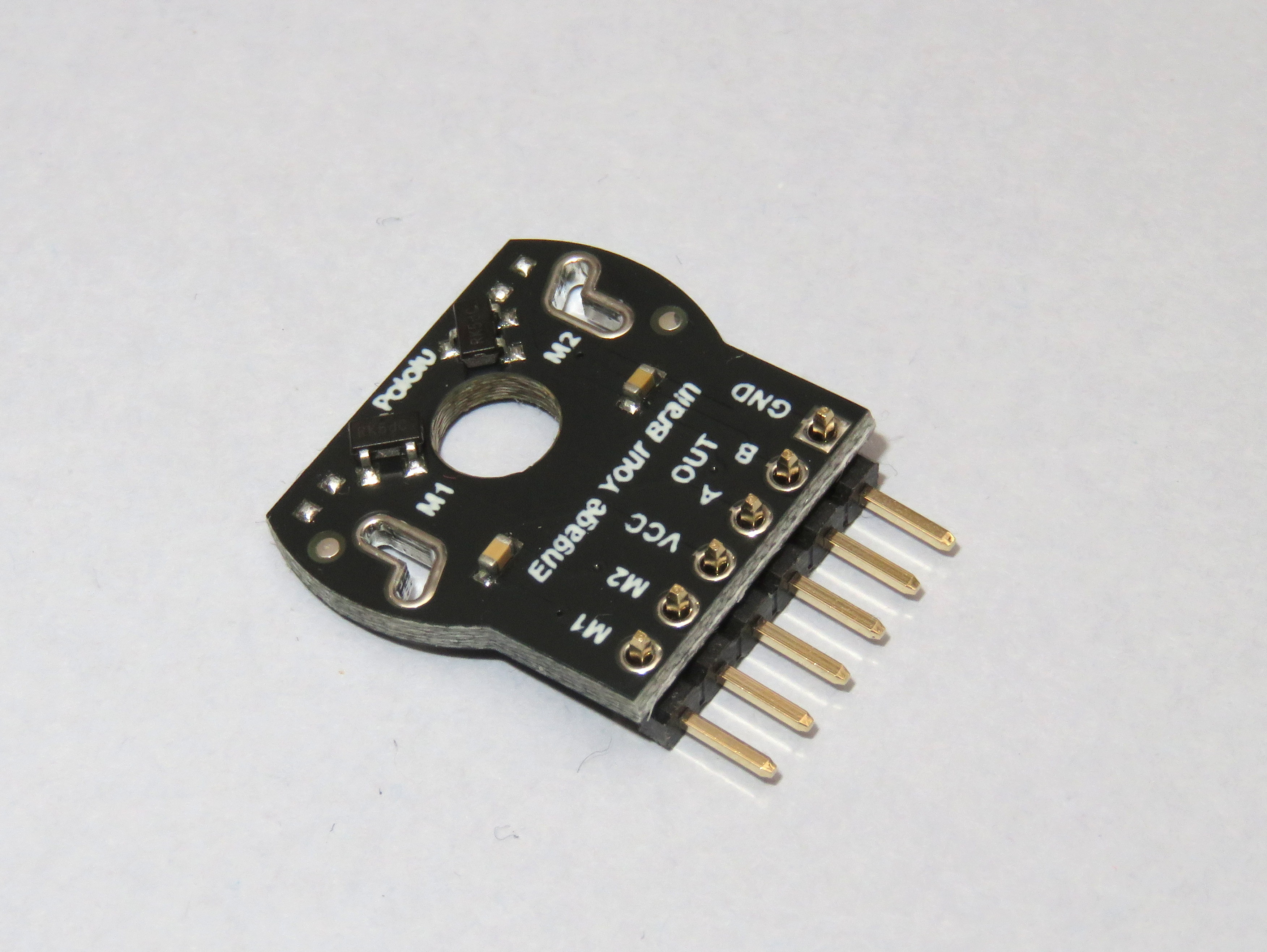
Rysunek 2. Płytka z enkoderami – poprawna orientacja złącza
Przylutowanie złącza innej orientacji niż na zdjęciu jest uzasadniona gdy będziemy używać innego układu do sterowana silnikami (np sterownika silnika na shieldzie do Arduino).
Następnie musimy przylutować blaszki silnika do płyty z enkoderem, należy zwrócić uwagę aby między silnikiem a płytką PCB z enkoderami nie było przerwy. Na rysunku 3 po lewej stronie płytka z enkoderem jest dobrze umiejscowiona – między płytką z enkoderem a silnikiem nie ma szczeliny, natomiast po prawej stronie jest ona złe umiejscowiona na co wskazuje szczelina między płytką z enkoderem a silnikiem. Nieprawidłowy montaż może spowodować problemy z pracą enkodera.
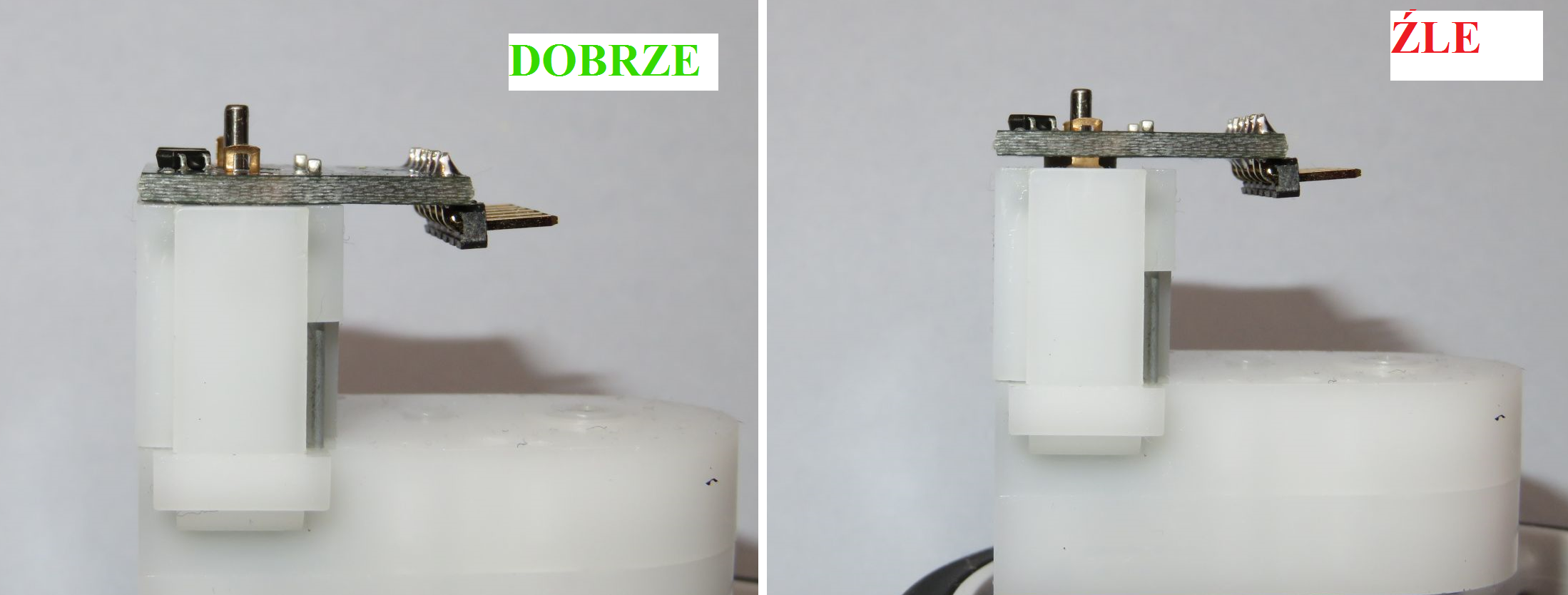 Rysunek 3. Prawidłowa i nie poprawna pozycja płytki z enkoderem
Rysunek 3. Prawidłowa i nie poprawna pozycja płytki z enkoderem
Następnym krokiem będzie przylutowania odpowiednich złącz do modułu zasilania wraz z sterownikiem silników dla podwozia Romi Chassis. Jako pierwsze należy przylutować dwie listwy goldpinów żeńskich (czerwone kwadraty rysunek 4), następnie przylutujemy wyprowadzenia sterowników silnika (zielony prostokąt rysunek 4) oraz listwy wyprowadzające zasilanie (żółty prostokąt rysunek 4), dzięki czemu będziemy mogli zasilać nasze KAmduino Uno, nie będziemy potrzebować dla niego oddzielnego źródła zasilania. Należy też przylutować goldpiny kątowe (niebieskie prostokąty), są to wyprowadzenia sygnałów enkoderów.
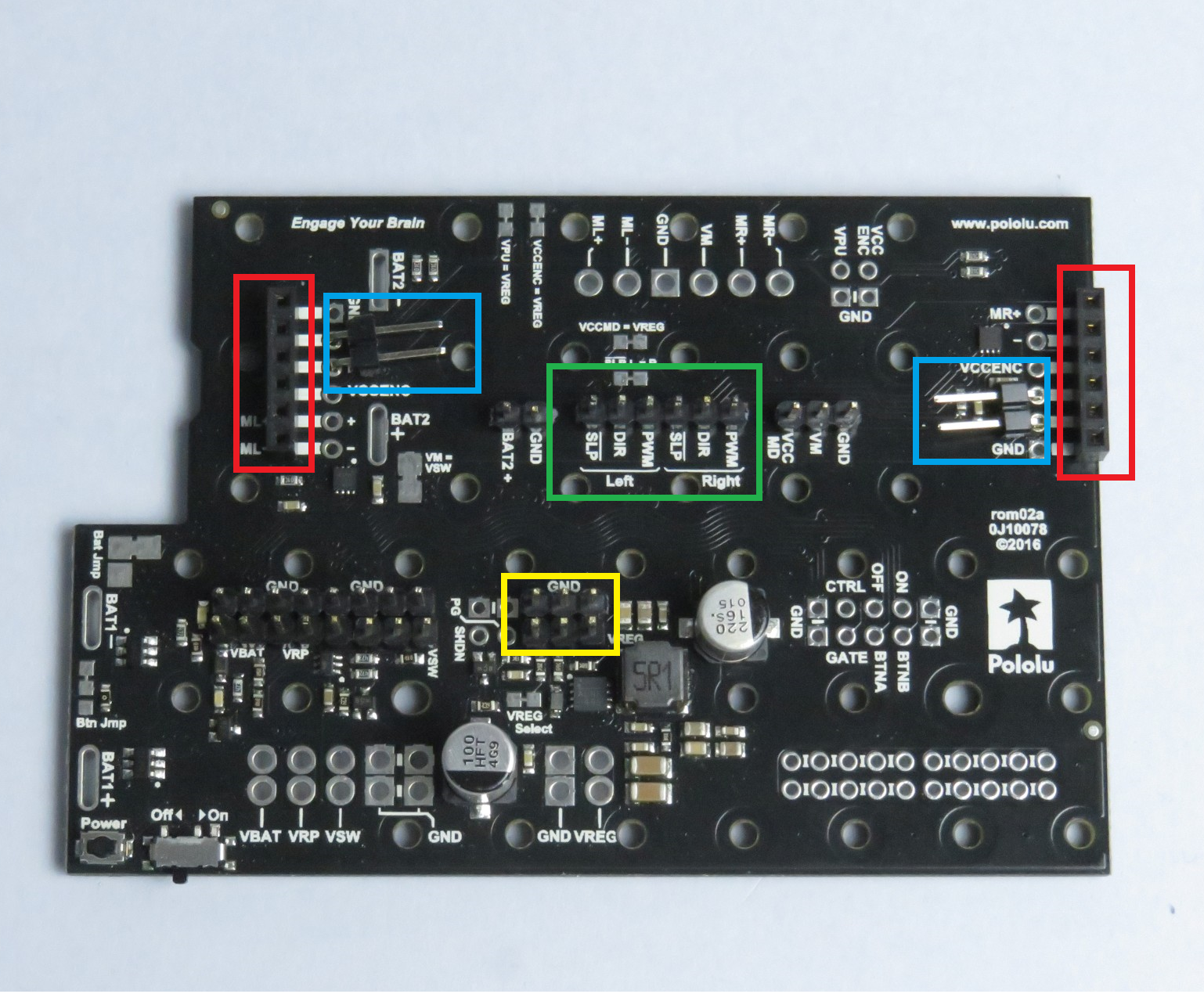
Rysunek 4. Zaznaczone pola w których należy przylutować złącza
Gdy już mamy przylutowane odpowiednie złącza, możemy przymocować moduł zasilania wraz z sterownikiem silników do podwozia za pomocą dołączonych do zestawu śrubek, oraz zamocować blaszki do pojemnika na baterię. Przyszedł czas aby zamontować resztę komponentów tzn. mocowania silników, silniki oraz kulkę podporową. Ten proces jest przedstawiony na poniższym filmiku.
Po zamontowaniu wszystkich elementów należy jeszcze przylutować blaszki od pojemnika na baterię do modułu zasilania wraz z sterownikiem silników. Miejsce lutowania zostało zaznaczone na rysunku 5 (czerwonymi kwadratami).
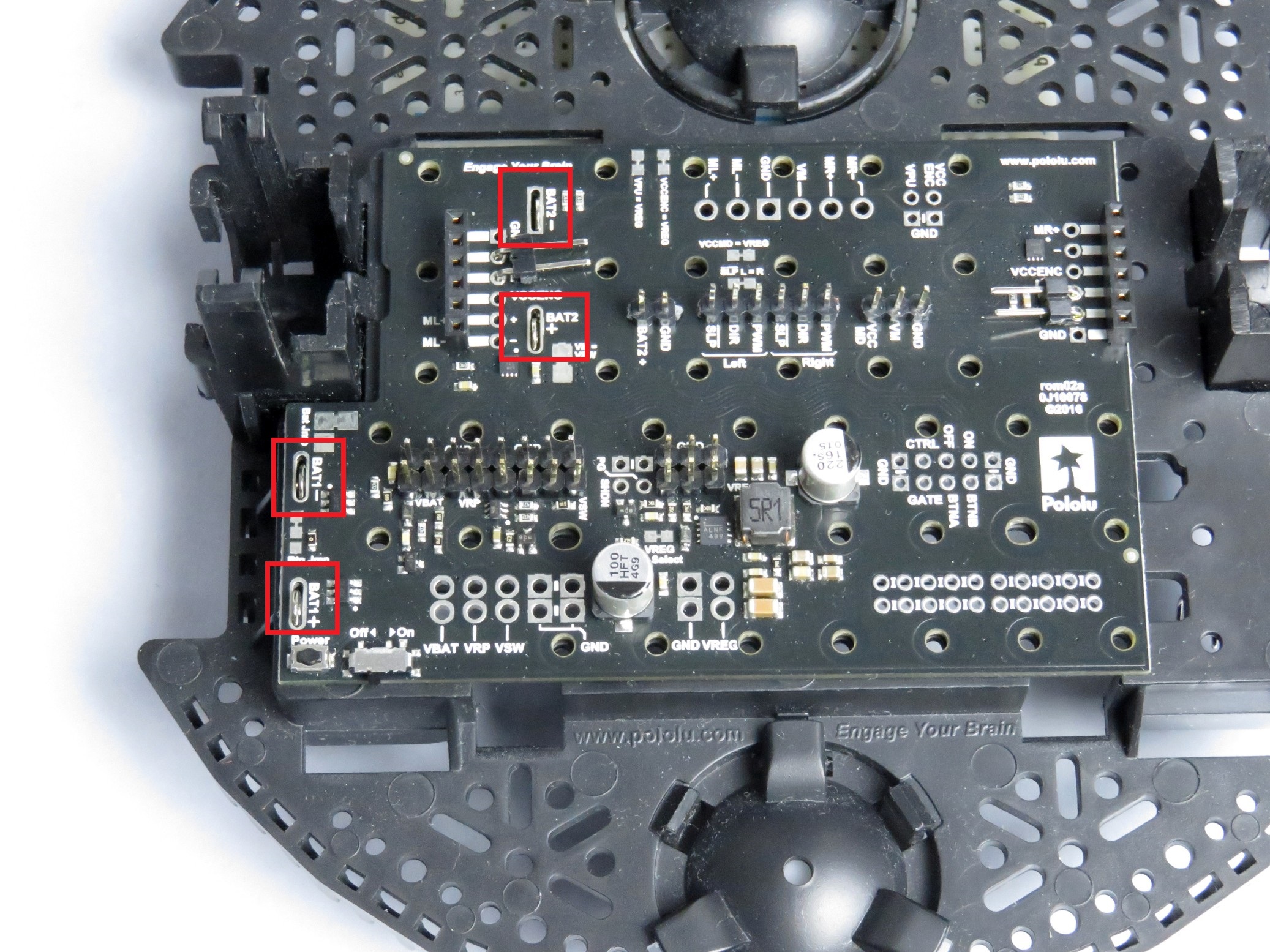
Rysunek 5. Zaznaczone pola w których należy przylutować blaszki pojemnika na baterie
Zmontowane podwozie z płytką zasilającą i sterownikiem silników prezentuje się następująco:
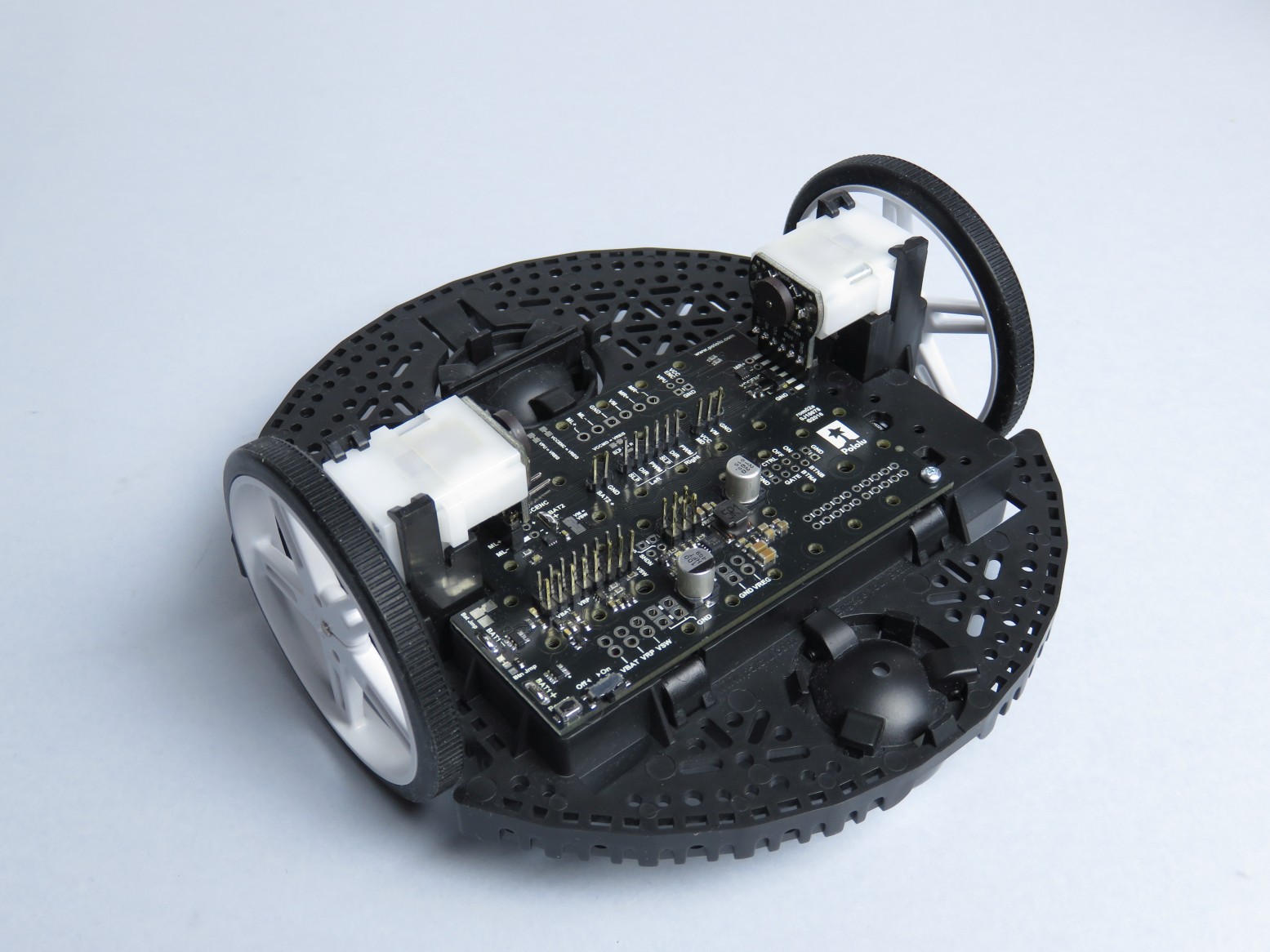
Rysunek 6. Zmontowane podwozie Romi Chassis z modułem zasilania i sterowników silników
Teraz zajmiemy się montażem KAmduino UNO na naszym podwoziu. Do celu można wykorzystać np. nylonowy dystans o długości 5 mm i śrubę M3 o długości 12 mm.
Następnym krokiem jest podłączenie płytki KAmduino UNO z modułem zasilania i sterowników silników.
 Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle
Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle  Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników
Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników  AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii
AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii 



