





[PROJEKT] Prosty robot z czujnikiem odległości Sharp GP2Y0D810Z0F
Gdy już wszystko jest połączone, możemy przystąpić do konfiguracji pinów mikrokontrolera STM32. Do tego celu wykorzystamy znany z poprzednich artykułów program CubeMX. Aby nie tworzyć konfiguracji od początku, skorzystamy z tej, która była wykorzystywana w projekcie [PROJEKT] Sterowanie silnikami – KA-Nucleo-F411CE oraz shield z układem L298. Musimy jedynie dodać pin, do którego jest podłączone wyjście czujnika odległości. Czujnik podłączymy do pinu D2 na KA-Nucleo-F411CE, który odpowiada pinowi PA10 w mikrokontrolerze STM32.
Szczegółowy opis narzędzia CubeMX znajduje się w artykule:
STM32Cube graficzny konfigurator STM32
Uruchamiamy program CubeMX, a następnie otwieramy plik projektu z [PROJEKT] Sterowanie silnikami – KA-Nucleo-F411CE oraz shield z układem L298.
Gdy robot zbliży się do przeszkody, powinno pojawić się przerwanie od tego zdarzenia. Dlatego pin (PA10), do którego podłączone jest wyjście czujnika odległości ustawimy w tryb generowania przerwania. Klikamy na niego, a następnie wybieramy opcje GPIO_EXTI10 (rysunek 5).
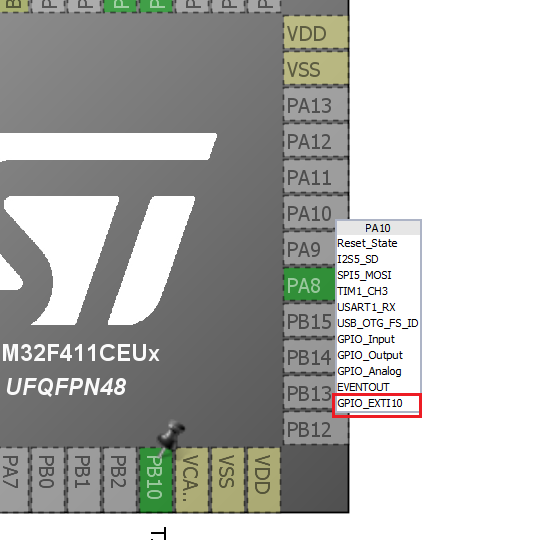
Rysunek 5. Wybieranie roli pinu, do którego został podłączony czujnik odległości
Teraz przechodzimy do zakładki Configuration, następnie w sekcji System wybieramy GPIO (rysunek 6).
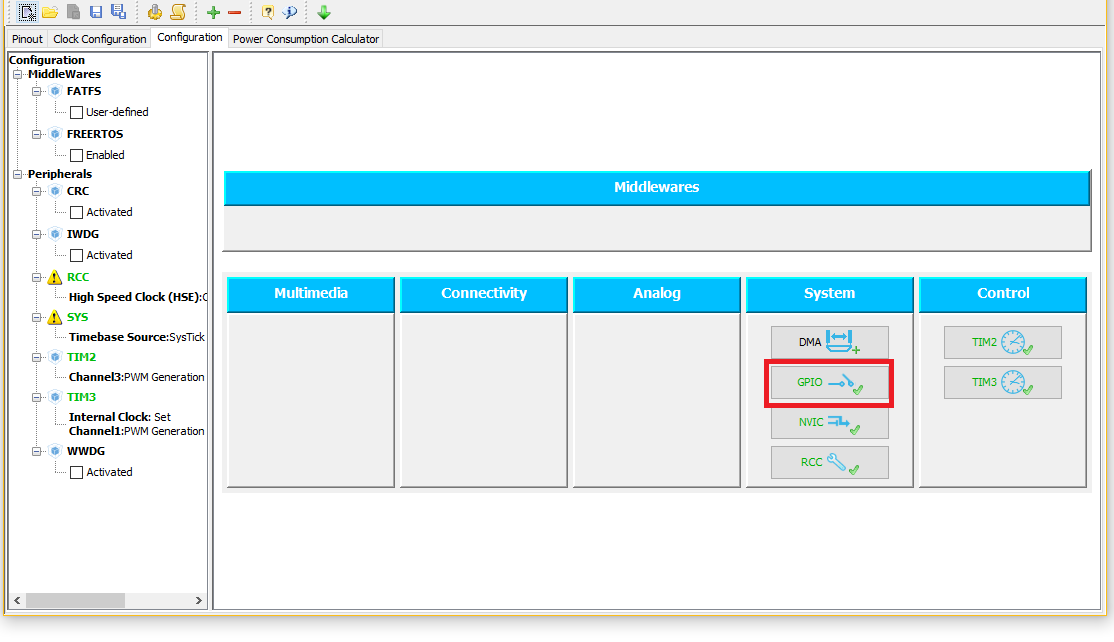
Rysunek 6. Wybór ustawienia portów GPIO
W momencie gdy czujnik odległości wykryje przeszkodę, to na jego wyjściu pojawi się stan niski. Z tego powodu przerwanie powinno być generowane, gdy wystąpi zbocze opadające. Dlatego w GPIO mode z rozwijanej listy wybieramy opcję External Interrupt Mode with Falling edge trigger detection, jak na rysunku 7.
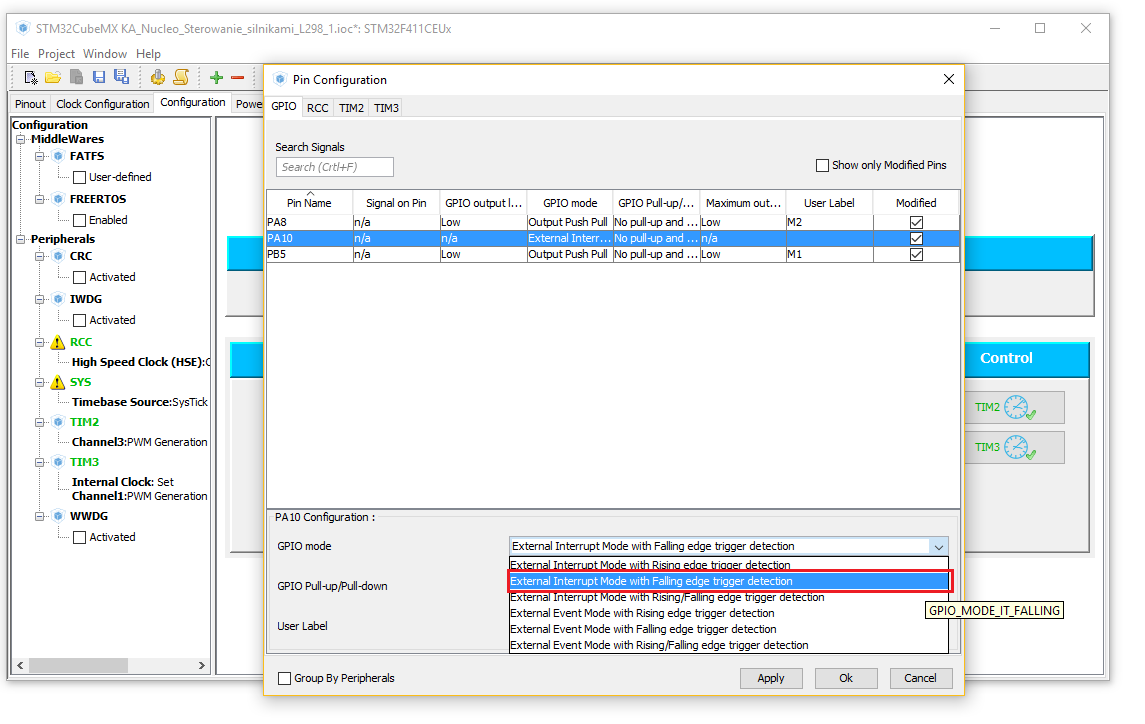
Rysunek 7. Wybór trybu przerwania na pinie PA10
Pozostało jeszcze włączyć obsługę przerwań. W tym celu przechodzimy do ustawień przerwań NVIC:
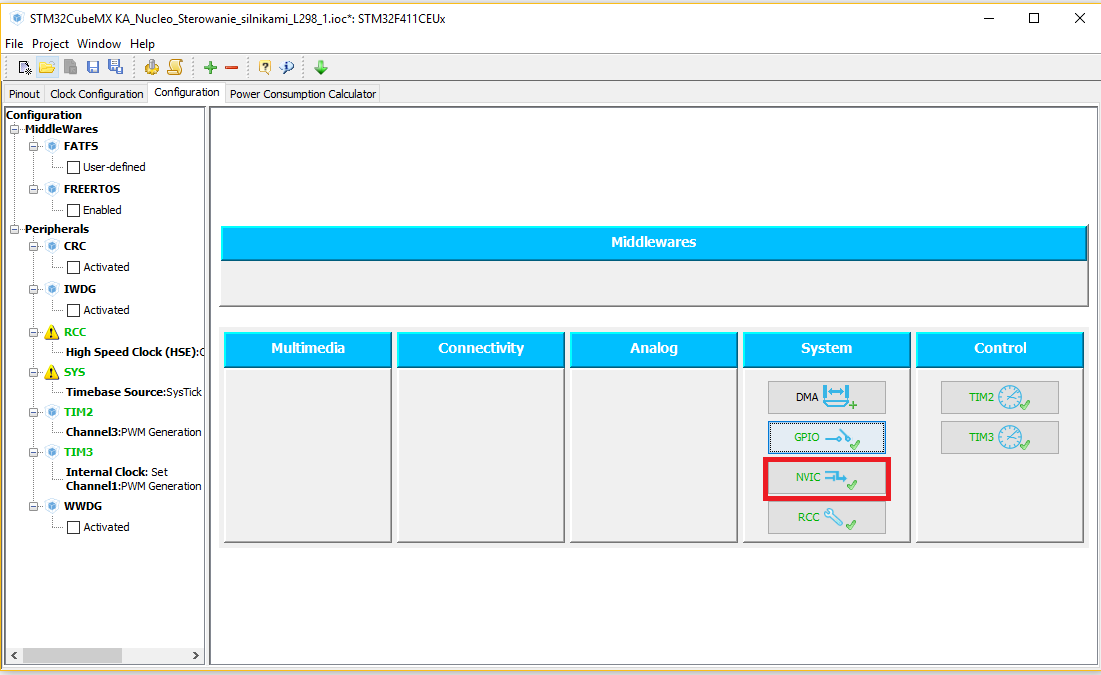
Rysunek 8. Ustawienia przerwań – zakładka NVIC
Pojawi się okno, w którym musimy zaznaczyć opcje, która uruchomi obsługę przerwań – EXTI line [15:10] interrupt (rysunek 9).
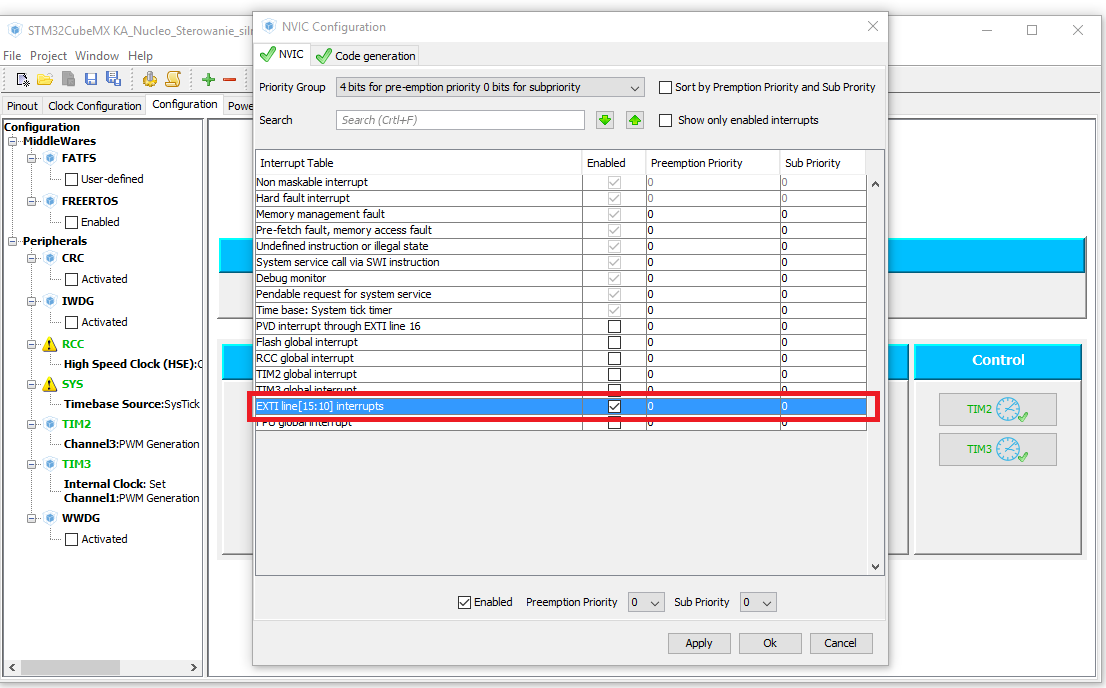
Rysunek 9. Włączenie obsługi przerwań dla pinu PA10
Wybór akceptuje się przyciskiem Apply, następnie klikamy w przycisk Ok.
Teraz musimy zmienić nazwę naszego projektu i wygenerować kod programu środowiska AC6. W tym celu wybieramy z menu w górnej cześć okna, File >> Save Project As. Zmieniamy nazwę naszego projektu, np. na KA_Nucleo_Robot, wybieramy folder workspace programu AC6 (2) oraz wybieramy Toolchain SW4STM32 (3) i klikamy Ok (rysunek 10).
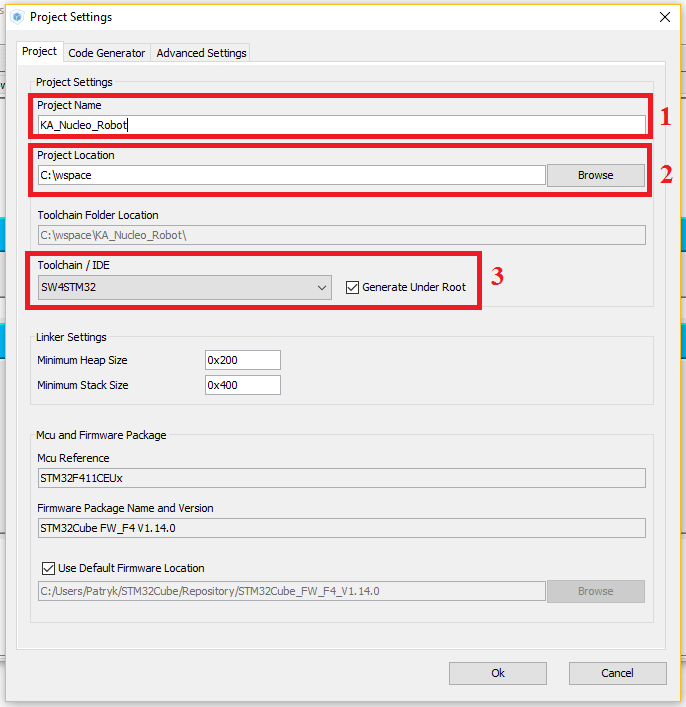
Rysunek 10. Zmiana nazwy projektu oraz zapis w folderze programu AC6
Teraz pozostało nam wygenerować projekt. W tym celu klikamy na Project >> Generate Code.
Otwieramy program AC6 i importujemy zapisany przed chwilą projekt.
 Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników
Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników  AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii
AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii  Mieszacze aktywne – ćwiczenie z serii ADALM
Mieszacze aktywne – ćwiczenie z serii ADALM 






