





Digilent Pmod i STM32 (cz. 3) – PmodACL i PmodMAXSONAR
Kolejna odsłona cyklu dotyczącego modułów peryferyjnych Pmod poświęcona jest modułom PmodACL z 3-osiowym akcelerometrem oraz PmodMAXSONAR z ultradźwiękowym czujnikiem odległości. Podobnie jak w poprzednik częściach, wszystkie opisywane przykłady zostały napisane w oparciu o bibliotekę STM32Cube_FW_L4 i mogą być uruchomione w środowisku Atollic TrueSTUDIO na zestawie deweloperskim KAmeleon (www.kameleonboard.org).
PmodACL
Moduł PmodACL zawiera 3-osiowy akcelerometr Analog Devices ADXL345 umożliwiający pomiar przyspieszenia w jednym z konfigurowanych zakresów: ±2g, ±4g, ±8g, ±16g. Rozdzielczość pomiaru można ustawić na 10 bitów niezależnie od zakresu, lub w trybie dynamicznym, który automatycznie ustawia rozdzielczość na 4 mg/LSB dla każdego zakresu pomiarowego. Akcelerometr ADXL345 posiada także możliwość wykrywania aktywności, pojedynczego lub podwójnego stuknięcia, a także swobodnego spadania. Wszystkie z powyższych detekcji są konfigurowane w rejestrach akcelerometru przechowujących informacje o progach przyspieszenia poszczególnych aktywności, a także czasach ich trwania. Dodatkowo akcelerometr posiada wewnętrzną kolejkę FIFO przechowującą wyniki pomiarów i umożliwiającą zmniejszenie obciążenia mikrokontrolera.
 Fotografia 1. Moduł PmodACL
Fotografia 1. Moduł PmodACL
Przerwania w układzie ADXL345
Układ ADXL345 ma możliwość informowania mikrokontrolera o wykrytych zdarzeniach za pomocą dwóch linii przerwań: INT1 i INT2. Dla obu linii dostępne są następujące źródła przerwań:
- DATA_READY – dostępne są nowe dane do odczytu,
- SINGLE_TAP – wykryto pojedyncze stuknięcie,
- DOUBLE_TAP – wykryto podwójne stuknięcie,
- Activity – wykryto stan aktywności,
- Inactivity – wykryto stan braku aktywności,
- FREE_FALL – wykryto swobodny spadek,
- Watermark – kolejka FIFO została zapełniona do ustawionego poziomu,
- Overrun – dostępne dane zostały nadpisane lub kolejka została przepełniona.
Każde z nich można niezależnie włączyć, a także przyporządkować do wybranej linii przerwań.
Połączenie modułu PmodACL z KAmeleonem
Dostęp do 8-bitowych rejestrów konfiguracyjnych i danych pomiarowych jest możliwy za pośrednictwem interfejsów SPI i I2C. Interfejs I2C jest aktywny, gdy pin SS (chip select) jest w stanie wysokim, natomiast po ustawieniu stanu niskiego na pinie SS możliwa jest komunikacja za pośrednictwem SPI. Moduł PmodACL zyposażono w złącza dla obu interfejsów – złącze J2 odpowiada 8-pinowemu interfejsowi I2C Pmod, natomiast J1 jest 12-pinowym interfejsem SPI typu 2A z dodatkową linią przerwania w miejsce sygnału RESET. W opisywanym przykładzie komunikacja z PmodACL odbywa się za pośrednictwem interfejsu SPI, ponieważ złącze J1 jest kompatybilne ze złączem Pmod-SPI na płytce KAmeleon. Opis połączeń uwzględniający wykorzystane piny mikrokontrolera STM32L496ZG znajduje się w tabeli 1, natomiast na fotografii 2 przedstawiono podłączony moduł.
Tabela 1. Sygnały PmodACL oraz odpowiadające im piny mikrokontrolera; w tabeli pominięto sygnały (NC) i linie zasilania występujące na złączu Pmod
| Sygnał | Numer pinu PmodACL (J1) | Pin STM32L496ZG (KAmeleon Pmod-SPI) |
| ~SS | 1 | PB0 |
| MOSI | 2 | PA7 |
| MISO | 3 | PE14 |
| SCLK | 4 | PA1 |
| INT2 | 7 | PE12 |
| INT1 | 8 | PE13 |
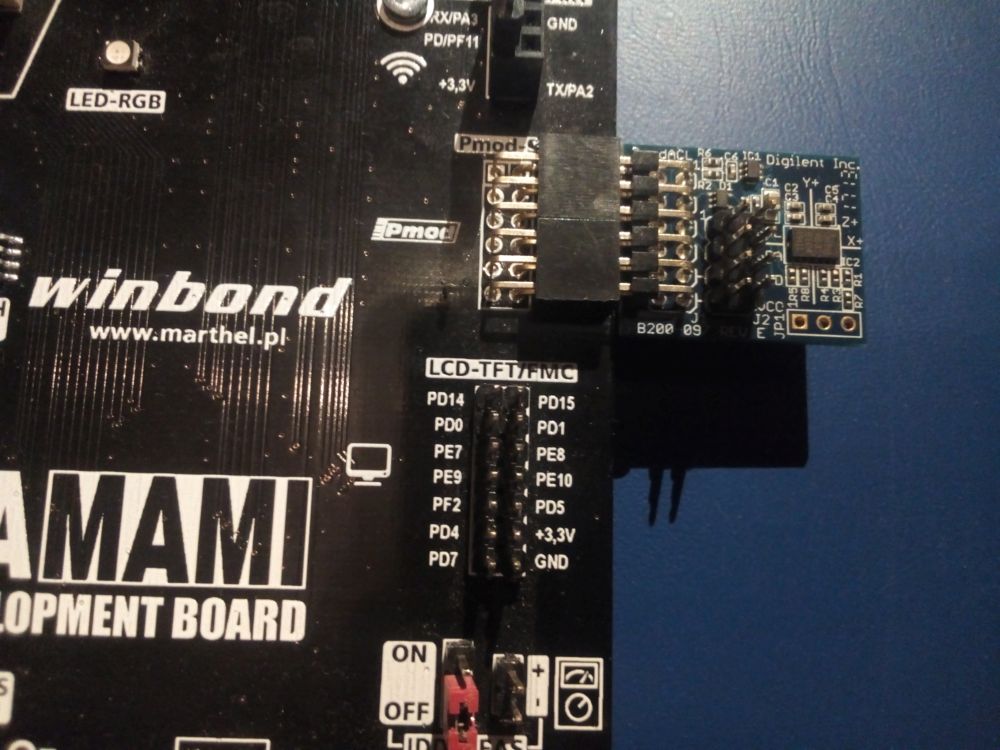 Fotografia 2. PmodACL podłączony do płytki KAmeleon
Fotografia 2. PmodACL podłączony do płytki KAmeleon
Konfiguracja PmodACL
Kod obsługujący moduł PmodACL znajduje się w pliku src/PmodACL.c. Zaimplementowano w nim funkcje do konfiguracji modułu (PmodACL_Config), odczytu danych z trzech osi (PmodACL_ReadXYZ), a także odczytu stanu przerwań (PmodACL_ReadInterruptFlags). Funkcję konfiguracyjną przedstawiono na listingu 1. Jest ona odpowiedzialna za konfigurację modułu SPI1 mikrokontrolera oraz wymaganych pinów. SPI konfigurowany jest w trybie dwukierunkowym (linie MISO i MOSI), 8 bitów danych, z programową kontrolą sygnału SS. Po inicjalizacji interfejsu SPI ustawiane są wartości rejestrów układu ADXL345. Przykładową sekwencję konfiguracji włączającą detekcję podwójnego stuknięcia przedstawiono w tabeli 2.
Listing 1. Konfiguracja modułu PmodACL
void PmodACL_Config(void)
{
// Enable clock for all required GPIO ports and SPI1.
__HAL_RCC_SPI1_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
__HAL_RCC_GPIOE_CLK_ENABLE();
// Configure the SPI connected to the Pmod module.
pmodAclSpi.Instance = SPI1;
pmodAclSpi.Init.Mode = SPI_MODE_MASTER;
pmodAclSpi.Init.Direction = SPI_DIRECTION_2LINES;
pmodAclSpi.Init.DataSize = SPI_DATASIZE_8BIT;
pmodAclSpi.Init.CLKPolarity = SPI_POLARITY_HIGH;
pmodAclSpi.Init.CLKPhase = SPI_PHASE_2EDGE;
pmodAclSpi.Init.NSS = SPI_NSS_SOFT;
pmodAclSpi.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_128;
pmodAclSpi.Init.FirstBit = SPI_FIRSTBIT_MSB;
pmodAclSpi.Init.TIMode = SPI_TIMODE_DISABLE;
pmodAclSpi.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE;
pmodAclSpi.Init.NSSPMode = SPI_NSS_PULSE_DISABLE;
HAL_SPI_Init(&pmodAclSpi);
// Initialization of PmodACL.
writeRegister(0x1d, 0x3C); // Set the tap threshold (THRESH_TAP register) to 60 * 62.5mg.
writeRegister(0x21, 0x0A); // Set the tap duration (DUR register) to 10 * 625us.
writeRegister(0x22, 0x10); // Set the latent (Latent register) to 16 * 1.25ms.
writeRegister(0x23, 0x80); // Set the window duration (Window register) to 128 * 1.25m.
writeRegister(0x2a, 0x07); // Enable all axes for tap detection (TAP_AXES register).
writeRegister(0x2d, 0x08); // Enable measurement in POWER_CTL register.
// Clear all flags before enabling the interrupt.
PmodACL_ReadInterruptFlags();
writeRegister(0x2e, 0x20); // Enable double tab interrupt in INT_ENABLE register.
writeRegister(0x31, 0x28); // Set the interrupts to be active in low state and enable
// full resolution in DATA_FORMAT register.
// Configure the INT1 (PE13) interrupt line with the lowest priority.
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.Mode = GPIO_MODE_IT_FALLING;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Pin = GPIO_PIN_13;
HAL_GPIO_Init(GPIOE, &GPIO_InitStruct);
HAL_NVIC_SetPriority(EXTI15_10_IRQn, 0x0F, 0);
HAL_NVIC_EnableIRQ(EXTI15_10_IRQn);
}
Sposób konfiguracji przerwania od podwójnego stuknięcia
Tabela 2. Konfiguracja rejestrów ADXL345 do detekcji podwójnego stuknięcia
| Rejestr | Wartość | Opis |
| 0x1D (THRESH_TAP) | 0x3C | Próg przyspieszenia dla detekcji stuknięcia (62,5 mg/LSB) |
| 0x21 (DUR ) | 0x0A | Maksymalny czas trwania stuknięcia (625 µs/LSB) |
| 0x22 (Latent) | 0x10 | Opóźnienie przed detekcją drugiego stuknięcia (1,25 ms/LSB) |
| 0x23 (Window) | 0x80 | Czas oczekiwania na drugie stuknięcie (1,25 ms/LSB) |
| 0x2A (TAP_AXES) | 0x07 | Włączenie osi do detekcji; wszystkie trzy są włączone |
| 0x2D (POWER_CTL ) | 0x08 | Włączenie pomiarów z wyłączonym trybem SLEEP |
| 0x30 (INT_SOURCE ) | odczyt | Odczyt i wyczyszczenie aktywnych flag przerwań; funkcja PmodACL_ReadInterruptFlags |
| 0x2E (INT_ENABLE ) | 0x20 | Włączenie przerwania od podwójnego stuknięcia (DOUBLE_TAP) |
| 0x31 (DATA_FORMAT) | 0x28 | Przerwanie aktywne w stanie niskim; automatyczna zmiana rozdzielczości (4 mg/LSB); wyrównanie danych do prawej; zakres pomiaru ±2g |
Przerwania w ADXL345
Wyjaśnienia może wymagać sposób detekcji, konfigurowany za pomocą opisanych rejestrów. Akcelerometr wykrywa wszystkie zdarzenia o amplitudzie przyspieszenia przekraczającej wartość podaną w rejestrze THRESH_TAP, a jednocześnie czasie trwania nieprzekraczającym wartości w rejestrze DUR. Zdarzenia takie są klasyfikowane jako pojedyncze stuknięcia. Po pierwszym zdarzeniu akcelerometr odczekuje czas ustawiony w rejestrze LATENT i jeżeli wykryje kolejne zdarzenie w czasie ustawionym w rejestrze WINDOW, zgłasza przerwanie DOUBLE_TAP. Algorytm ten przedstawiono na rysunku 3.
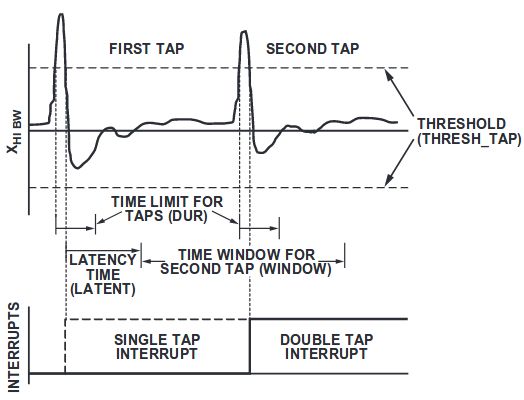 Rysunek 3. Algorytm detekcji podwójnego stuknięcia w akcelerometrze ADXL345 (źródło: dokumentacja ADXL345)
Rysunek 3. Algorytm detekcji podwójnego stuknięcia w akcelerometrze ADXL345 (źródło: dokumentacja ADXL345)
Na końcu funkcji PmodACL_Config konfigurowane jest przerwanie na pinie PE13, które odpowiada sygnałowi INT1. Domyślnie wszystkie przerwania akcelerometru są przypisane do tej linii (rejestr 0x25 – INT_MAP). W tym przykładzie linia przerwań INT2 nie jest używana.
Konfiguracja SPI
Zgodnie z konwencją biblioteki STM32Cube, wywołanie funkcji bibliotecznej HAL_SPI_Init powoduje wywołanie funkcji HAL_SPI_MspInit, która została zaimplementowana w pliku src/PmodACL.c. Funkcję tą przedstawiono na listingu 2. Jest ona odpowiedzialna za konfigurację pinów SS, SCLK, MISO, a także MOSI. Zgodnie z konfiguracją modułu SPI1, pin SS (PB0) jest sterowany programowo i zostaje pod kontrolą portu GPIO.
Listing 2. Konfiguracja pinów używanych przez SPI
oid HAL_SPI_MspInit(SPI_HandleTypeDef *hspi)
{
// Initialize GPIO used by the SPI1 peripheral. The CS is controlled by the software.
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_PULLDOWN;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF5_SPI2;
GPIO_InitStruct.Pin = GPIO_PIN_1 | GPIO_PIN_7;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
GPIO_InitStruct.Pin = GPIO_PIN_14;
HAL_GPIO_Init(GPIOE, &GPIO_InitStruct);
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_PULLDOWN;
GPIO_InitStruct.Pin = GPIO_PIN_0;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_SET);
}
void PmodACL_ReadXYZ(int16_t* x, int16_t* y, int16_t* z)
{
uint8_t data[6];
readRegister(0x32, data, 6);
// The ADXL345 on PmodACL is configured for the highest resolution (4mg/LSB)
// so the axes readings need to be multiplied by 4 to obtain the acceleration in [mg].
*x = ((data[1] << 8) + data[0]) * 4;
*y = ((data[3] << 8) + data[2]) * 4;
*z = ((data[5] << 8) + data[4]) * 4;
}
uint8_t PmodACL_ReadInterruptFlags(void)
{
uint8_t data;
readRegister(0x30, &data, 1);
return data;
}
Odczyt danych
Podczas wysyłania adresu rejestru przez interfejs SPI, dwa najstarsze bity mają szczególne znaczenia. Bit 7. oznacza typ operacji – zapis (0) lub odczyt (1), natomiast bit 6. można ustawić do odczytu lub zapisu wielu bajtów. Adres jest wówczas automatycznie inkrementowany, co umożliwia odczyt danych ze wszystkich osi podczas jednej transakcji SPI. Funkcję realizującą odczyt i konwersję danych przedstawiono na listingu 3. Przy ustawieniu rozdzielczości na 4 mg/LSB, odczyt każdej z osi należy pomnożyć przez 4, aby otrzymać wynik pomiaru w [mg]. Kolejka FIFO w przykładzie nie jest używana, dlatego zawsze odczytywane są wyniki z ostatniego pomiaru. Częstotliwość wykonywania pomiarów jest konfigurowana w rejestrze BW_RATE (0x2C). W przykładzie ma on wartość domyślną 0x0A, co oznacza częstotliwość 100 Hz. Za realizację odczytu i zapisu przez SPI są odpowiedzialne dwie funkcje pomocnicze: readRegister, a także writeRegister zaprezentowane na listingu 4.
Listing 3. Odczyt i konwersja danych z akcelerometru
static void readRegister(uint8_t address, uint8_t* data, uint8_t size)
{
// Reading N bytes requires one more byte at the beginning for address transmission,
// so the whole SPI transaction has to be N + 1 bytes long.
uint8_t txbuf[MAX_SPI_RX_BUFER_LEN + 1] = {0x00};
uint8_t rxbuf[MAX_SPI_RX_BUFER_LEN + 1] = {0x00};
txbuf[0] = address | SPI_READ_FLAG | SPI_MB_FLAG;
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_RESET);
HAL_SPI_TransmitReceive(&pmodAclSpi, txbuf, rxbuf, size + 1, 100);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_SET);
for(int i=0; i<size; i++)
data[i] = rxbuf[i+1];
}
Listing 4. Funkcje pomocnicze do zapisu i odczytu danych przez SPI
static void writeRegister(uint8_t address, uint8_t data)
{
uint8_t txbuf[2] = {address | SPI_WRITE_FLAG | SPI_MB_FLAG, data};
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_RESET);
HAL_SPI_Transmit(&pmodAclSpi, txbuf, 2, 100);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_SET);
}
static void readRegister(uint8_t address, uint8_t* data, uint8_t size)
{
// Reading N bytes requires one more byte at the beginning for address transmission,
// so the whole SPI transaction has to be N + 1 bytes long.
uint8_t txbuf[MAX_SPI_RX_BUFER_LEN + 1] = {0x00};
uint8_t rxbuf[MAX_SPI_RX_BUFER_LEN + 1] = {0x00};
txbuf[0] = address | SPI_READ_FLAG | SPI_MB_FLAG;
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_RESET);
HAL_SPI_TransmitReceive(&pmodAclSpi, txbuf, rxbuf, size + 1, 100);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_SET);
for(int i=0; i<size; i++)
data[i] = rxbuf[i+1];
}
Obsługa przerwań
Główna pętla programu w pliku src/main.c wykonuje odczyt danych co jedną sekundę, a także wysyła wartości przyspieszenia ze wszystkich trzech osi na port szeregowy LPUART1. Konfiguracja portu znajduje się w pliku src/serial.c. W pliku main.c znajduje się także obsługa przerwania konfigurowanego przez funkcję PmodACL_Config. Funkcja obsługi przerwania, przedstawiona na listingu 5, odczytuje rejestr akcelerometru przechowujący stan przerwań. Mimo, że w przykładzie używane jest tylko jedno źródło przerwania, to odczyt jest konieczny ze względu na czyszczenie ich stanu w akcelerometrze.
Listing 5. Funkcja obsługi przerwań generowanych przez PmodACL
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
// Read the flags to clear the interrupt state register.
PmodACL_ReadInterruptFlags();
// Blink LED to indicate that the interrupt was detected.
// When using HAL_Delay within the interrupt handler, the SysTick interrupt priority
// has to be higher than the priority of the currently processed interrupt.
// Otherwise the delay counter inside the HAL library will not increment.
// The SysTick interrupt priority is defined inside the stm32l4xx_hal_conf.h.
// The GPIO priority is set inside the PmodACL_Config() function.
Led_TurnOn(LED0);
HAL_Delay(100);
Led_TurnOff(LED0);
}
Wystąpienie przerwania sygnalizowane jest przez mrugnięcie diody LED0 na płytce KAmeleon. Użyta w przerwaniu funkcja HAL_Delay wprowadza opóźnienie w obsłudze przerwania, co nie jest dobrą praktyką i zostało zaimplementowane tylko ze względu na uproszczenie kodu. Aby opóźnienie mogło zadziałać, priorytet przerwania SysTick musi być wyższy od przerwania, w obsłudze którego jest użyte. Priorytet ten można zmienić w pliku stm32l4xx_hal_conf.h (TICK_INT_PRIORITY). Funkcje pomocnicze do obsługi diody zaimplementowano w pliku src/led.c.
 Grzegorz Kamiński: Dlaczego powstały tranzystory FinFET i GAAFET?
Grzegorz Kamiński: Dlaczego powstały tranzystory FinFET i GAAFET?  Google stawia na fuzję jądrową. AI potrzebuje coraz więcej energii
Google stawia na fuzję jądrową. AI potrzebuje coraz więcej energii  Fotowoltaika perowskitowa: od wydajności laboratoryjnej do masowej komercjalizacji
Fotowoltaika perowskitowa: od wydajności laboratoryjnej do masowej komercjalizacji 

![O konkursie organizowanym przez firmę TRUMPF Huettinger i polskie uczelnie techniczne opowiada Alicja Peresada i prof. Jacek Rąbkowski oraz kilkoro nagrodzonych dyplomantów: mgr inż. Jakub Dobosz, inż. Maja Zielińska, dr inż. Jakub Kołodziej, dr inż Weronika Hryniewska-Guzik i dr inż. Grzegorz Bartyzel. Zapraszamy do obejrzenia filmu! [materiał redakcyjny]](https://mikrokontroler.pl/wp-content/uploads/2026/07/TRUMPF-czolowka.png "https://www.youtube.com/watch?v=XkeyLmtLfxo")



