





Digilent Pmod i STM32 (cz. 5) – PmodCLS, PmodDPG1 i PmodISNS20
PmodISNS20
Ostatnim z prezentowanych w artykule modułów jest PmodISNS20, czyli moduł do pomiaru prądu oparty o czujnik ACS722. Czujnik ten jest w stanie mierzyć prąd stały lub zmienny o maksymalnej wartości 20 A. Układ posiada wyjście analogowe, z którego można odczytać napięcie proporcjonalne do mierzonego natężenia prądu. Czułość pomiaru wynosi 66 mV/A, a maksymalny błąd pomiaru 3%. Układ ACS722 umożliwia wybór pasma sygnału wyjściowego na 80 kHz, lub 20 kHz – jego zmiana jest możliwa za pomocą zworki JP2. Dodatkowo moduł PmodISNS20 pozwala na włączenie filtra analogowego, ograniczającego pasmo do 120 Hz – służy do tego zworka JP1. 12-bitowy przetwornik analogowo-cyfrowy ADCS7476 z interfejsem SPI mierzy napięcie wyjściowe. Przetwornik omówiono już przy okazji opisu modułu PmodDPG1.
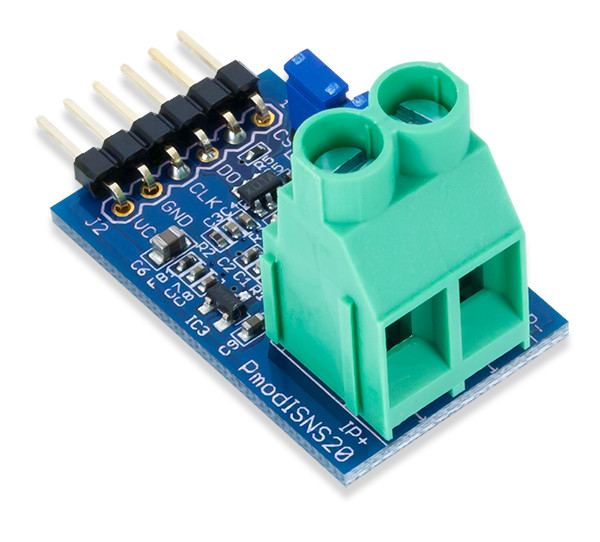 Fotografia 6. Moduł PmodISNS20
Fotografia 6. Moduł PmodISNS20
Podobnie jak w przypadku dwóch poprzednich modułów omówionych w artykule, PmodISNS20 powinien zostać podłączony do złącza Pmod-SPI znajdującego się na płytce KAmeleon, tak jak na fotografii 7. Połączenia pinów mikrokontrolera z pinami modułu są zgodne z wymienionymi w tabeli 1.
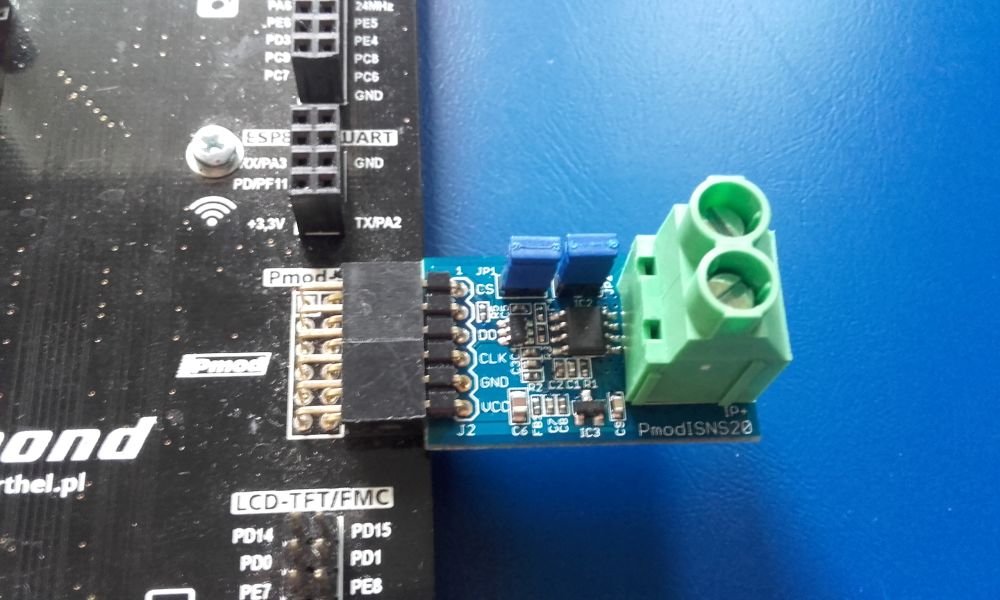 Fotografia 7. Moduł PmodISNS20 podłączony do zestawu KAmeleon
Fotografia 7. Moduł PmodISNS20 podłączony do zestawu KAmeleon
Konfiguracja interfejsu SPI
Konfiguracja SPI dla ADCS7476, przedstawiona na listingu 8 i zaimplementowana w pliku src/PmodISNS20.c, wygląda podobnie jak w przypadku modułu PmodDPG1, jednak w tym przypadku pokażemy programową kontrolę linii CS.
Listing 8. Inicjalizacja interfejsu SPI dla PmodISNS20
SPI_HandleTypeDef pmodIsns20Spi;
void PmodISNS20_Config(void)
{
// Configure the SPI connected to the Pmod module. Only the MISO line is required.
pmodIsns20Spi.Instance = SPI1;
pmodIsns20Spi.Init.Mode = SPI_MODE_MASTER;
pmodIsns20Spi.Init.Direction = SPI_DIRECTION_2LINES_RXONLY;
pmodIsns20Spi.Init.DataSize = SPI_DATASIZE_16BIT;
pmodIsns20Spi.Init.CLKPolarity = SPI_POLARITY_HIGH;
pmodIsns20Spi.Init.CLKPhase = SPI_PHASE_1EDGE;
pmodIsns20Spi.Init.NSS = SPI_NSS_SOFT;
pmodIsns20Spi.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_64;
pmodIsns20Spi.Init.FirstBit = SPI_FIRSTBIT_MSB;
pmodIsns20Spi.Init.TIMode = SPI_TIMODE_DISABLE;
pmodIsns20Spi.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE;
pmodIsns20Spi.Init.NSSPMode = SPI_NSS_PULSE_DISABLE;
HAL_SPI_Init(&pmodIsns20Spi);
}
Ze względu na różnicę w konfiguracji SPI, zmianie musi też ulec konfiguracja GPIO, w której pin PB0, odpowiadający sygnałowi CS, działa jako wyjście z rezystorem podciągającym. Widać to na listingu 9.
Listing 9. Inicjalizacja pinów interfejsu SPI dla PmodISNS20
// Initialize GPIO used by the SPI2 peripheral. The CS is configured by the software (PB0 pin). __HAL_RCC_SPI1_CLK_ENABLE(); __HAL_RCC_GPIOA_CLK_ENABLE(); __HAL_RCC_GPIOB_CLK_ENABLE(); __HAL_RCC_GPIOE_CLK_ENABLE(); GPIO_InitTypeDef GPIO_InitStruct; GPIO_InitStruct.Mode = GPIO_MODE_AF_PP; GPIO_InitStruct.Pull = GPIO_PULLUP; GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH; GPIO_InitStruct.Alternate = GPIO_AF5_SPI1; GPIO_InitStruct.Pin = GPIO_PIN_1; HAL_GPIO_Init(GPIOA, &GPIO_InitStruct); GPIO_InitStruct.Pin = GPIO_PIN_14; HAL_GPIO_Init(GPIOE, &GPIO_InitStruct); GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; GPIO_InitStruct.Pin = GPIO_PIN_0; HAL_GPIO_Init(GPIOB, &GPIO_InitStruct); HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_SET);
Odczyt i konwersja danych
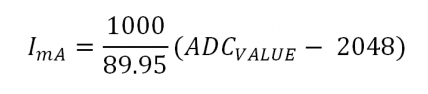
Ostatnia z funkcji, pokazana na listingu 10, odczytuje wartość napięcia z przetwornika analogowo-cyfrowego. Następnie dokonuje jego konwersji na natężenie prądu mierzone przez czujnik ACS722. Transfer SPI należy wykonać dwukrotnie, ponieważ za pierwszym razem przetwornik dokonuje konwersji, a za drugim odczytywana jest zmierzona wartość. Konwersję na natężenie prądu zaimplementowano zgodnie z zależnością:
Listing 10. Odczyt i konwersja wartości różnicy ciśnienia
int32_t PmodISNS20_GetValue(void)
{
uint16_t adcValue = 0;
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_RESET);
HAL_SPI_Receive(&pmodIsns20Spi, (uint8_t*)&adcValue, 1, 100);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_RESET);
HAL_SPI_Receive(&pmodIsns20Spi, (uint8_t*)&adcValue, 1, 100);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_SET);
// The current value in [mA] is calculated according to the formula given in the PmodISNS20
// reference manual.
return (int32_t)(((int16_t)adcValue - 2048) * 1000.0 / 89.95);
}
Przykładowy program dokonuje pomiaru natężenia prądu co pół sekundy. Zmierzoną wartość kod wypisuje na port szeregowy LPUART1 obsługiwany przez funkcje zaimplementowane w pliku src/serial.c.
 Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników
Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników  AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii
AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii  Mieszacze aktywne – ćwiczenie z serii ADALM
Mieszacze aktywne – ćwiczenie z serii ADALM 






