





Digilent Pmod i STM32 (cz. 8) – PmodMTDS, PmodRTCC i PmodCMPS2
PmodRTCC
Drugi z prezentowanych w tej części modułów to PmodRTCC zawierający zegar czasu rzeczywistego z kalendarzem oparty o układ Microchip MCP79410. Układ ten umożliwia dodatkowo ustawienie dwóch alarmów, generację fali prostokątnej, a także korzystanie z pamięci EEPROM (128 B) i SRAM (64 B). Do obsługi modułu PmodRTCC została udostępniona biblioteka RTCCI2C dostępna na stronie producenta: https://reference.digilentinc.com/pmod/pmod/rtcc/example_code. Jest ona przeznaczona dla środowiska MPIDE, dlatego na potrzeby opisywanego przykładu musiała ona zostać modyfikowana tak, aby mogła być użyta w środowisku Atollic z mikrokontrolerem STM32L496ZGT6.
 Fotografia 4. Moduł PmodRTCC
Fotografia 4. Moduł PmodRTCC
Połączenie z modułem KAmeleon
Moduł PmodRTCC posiada 8-pinowe złącze dla interfejsu I2C (J2) i 2-pinowe złącze J1 zawierające piny MFP (Multi-Function Pin), a także GND. Pin MFP może pełnić różne funkcje, zależnie od konfiguracji układu – w prezentowanym przykładzie będzie on źródłem przerwań wywołanych wystąpieniem alarmu. Sygnały modułu PmodRTCC podłączono do złącza oznaczonego jako ARDUINO CONNECTOR na płytce KAmeleon zgodnie z tabelą 4 i fotografią 5.
Tabela 4. Sposób podłączenia modułu PmodRTCC do złącza ARDUINO CONNECTOR zestawu KAmeleon
| Sygnał | Numer pinu PmodRTCC | Numer pinu KAmeleon ARDUINO CONNECTOR | Pin mikrokontrolera |
| SCL | 1 (J2) | D15 | PF14 |
| SDA | 2 (J2) | D14 | PF15 |
| MFP | 1 (J1) | D13 | PB10 |
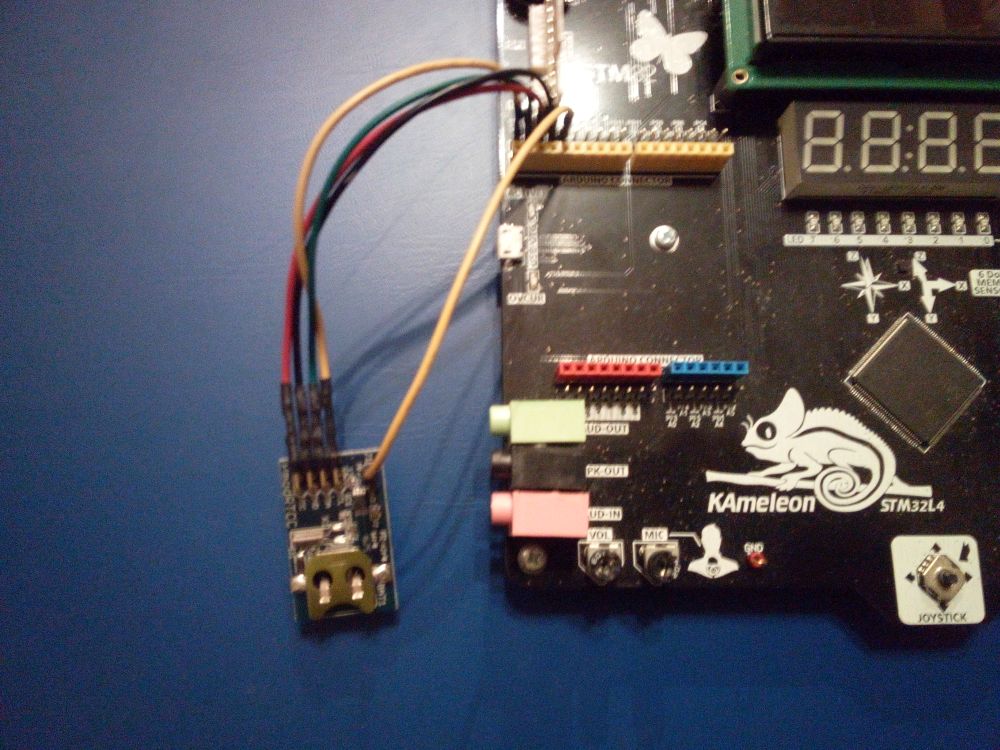 Fotografia 5. Moduł PmodRTCC podłączony do płytki KAmeleon
Fotografia 5. Moduł PmodRTCC podłączony do płytki KAmeleon
Kod przykładu
Za obsługę interfejsu I2C odpowiadają trzy zmodyfikowane metody klasy RTCCI2C: begin, readValue i writeValue. Pierwsza z nich, przedstawiona na listingu 5, odpowiada za konfigurację interfejsu I2C4, a także pinu PB10 do obsługi przerwania. Przerwanie jest wykrywane na zboczu opadającym sygnału MFP w momencie wystąpienia alarmu. Dla komunikacji I2C konfigurowane są dwa piny – PF14 i PF15 oraz interfejs I2C4. Dla tego ostatniego konieczne jest podanie wartości rejestru TIMINGR, przedstawionego na rysunku 6. Jest on odpowiedzialny za generację odpowiednich przebiegów czasowych na liniach SDA i SCL: SCLL i SCLH definiują długość stanu niskiego i wysokiego sygnału SCL, SCLDEL oznacza opóźnienie pomiędzy ustawieniem wartości na linii danych a zboczem narastającym sygnału zegarowego, natomiast SDADEL opóźnienie pomiędzy zboczem opadającym zegara, a zmiana stanu na linii danych. Pole PRESC wyznacza dzielnik sygnału zegarowego taktującego układ I2C mikrokontrolera.
Listing 5. Konfiguracja interfejsu I2C do komunikacji z modułem PmodRTCC
void RTCCI2C::begin()
{
__HAL_RCC_I2C4_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
__HAL_RCC_GPIOF_CLK_ENABLE();
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.Mode = GPIO_MODE_IT_FALLING;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Pull = GPIO_PULLUP;
GPIO_InitStruct.Pin = GPIO_PIN_10;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
HAL_NVIC_SetPriority(EXTI15_10_IRQn, 2, 0);
HAL_NVIC_EnableIRQ(EXTI15_10_IRQn);
GPIO_InitStruct.Mode = GPIO_MODE_AF_OD;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF4_I2C4;
GPIO_InitStruct.Pin = GPIO_PIN_14 | GPIO_PIN_15;
HAL_GPIO_Init(GPIOF, &GPIO_InitStruct);
this->i2c.Instance = I2C4;
this->i2c.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT;
this->i2c.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE;
this->i2c.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE;
this->i2c.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE;
this->i2c.Init.OwnAddress1 = 0x01;
this->i2c.Init.Timing = 0x10563046;
HAL_I2C_Init(&this->i2c);
}
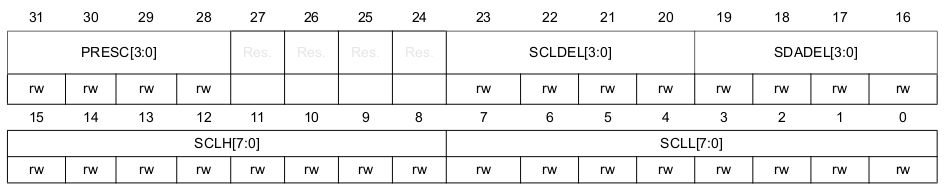 Rysunek 6. Definicja rejestru I2C_TIMINGR (źródło: dokumentacja mikrokontrolera STM32L496ZG)
Rysunek 6. Definicja rejestru I2C_TIMINGR (źródło: dokumentacja mikrokontrolera STM32L496ZG)
Funkcje odpowiedzialne za komunikację z modułem PmodRTCC przedstawiono na listingu 6. Wykorzystują one blokujące wywołania HAL_I2C_Master_Transmit i HAL_I2C_Master_Receive biblioteki STM32Cube.
Listing 6. Funkcje realizujące odczyt i zapis rejestru.
{
uint8_t value = 0;
HAL_I2C_Master_Transmit(&this->i2c, RTCC_I2C_ADDR, &address, 1, 100);
HAL_I2C_Master_Receive(&this->i2c, RTCC_I2C_ADDR, &value, 1, 100);
return value;
}
void RTCCI2C::writeValue(uint8_t address, uint8_t value)
{
uint8_t data[2] = {address, value};
HAL_I2C_Master_Transmit(&this->i2c, RTCC_I2C_ADDR, data, 2, 100);
}
Konfiguracja rejestrów MCP79410
Oprócz wymienionych funkcji, klasa RTCCI2C zawiera także metody konfigurujące poszczególne rejestry układu MCP79410. W tabeli 5 wymieniono funkcje użyte w kodzie przykładu. Wszystkie wartości są zapisywane i odczytywane w kodzie BCD.
Tabela 5. Metody klasy RTCCI2C użyte w przykładzie
| Metoda klasy RTCCI2C | Opis |
| startClock/stopClock | Uruchomienie/zatrzymanie zegara przez włączenie/wyłączenie oscylatora. |
| setSec/getSec | Zapis/odczyt sekund zegara lub alarmu. |
| setMin/getMin | Zapis/odczyt minut zegara lub alarmu. |
| setHour/getHour | Zapis/odczyt godziny zegara lub alarmu. |
| setDay/getDay | Zapis/odczyt dnia tygodnia (0x01 – 0x07) zegara lub alarmu. |
| setDate/getDate | Zapis/odczyt dnia miesiąca (0x01 – 0x32) zegara lub alarmu. |
| setMonth/getMonth | Zapis/odczyt miesiąca (0x01 – 0x12) zegara lub alarmu. |
| setYear/getYear | Zapis/odczyt roku (0x00 – 0x99) zegara lub alarmu. |
| enableAlarm | Włączenie alarmu |
| getAmPm | Czas dla zegara 12-godzinnego (AM/PM). |
Funkcja main
Funkcję main przykładowej aplikacji przedstawiono na listingu 7. Konfiguruje ona moduł PmodRTCC i ustawia datę: Niedziela, 4. marca 2018 23:15:30. Następnie ustawiany jest alarm na 10 sekund od zdefiniowanej daty. Pętla główna, za pomocą funkcji pomocniczej printTime, co sekundę odczytuje datę i godzinę. Odczytane wartości są od razu wysyłane na port szeregowy LPUART1. Alarm jest sygnalizowany przez zapalenie diody LED1 podłączonej do pinu PC7. Port szeregowy LPUART1 jest konfigurowany i obsługiwany za pomocą kodu znajdującego się w pliku serial.c, natomiast sterownik diody został umieszczony w pliku led.c.
Listing 7. Kod główny przykładowej aplikacji
int main(void)
{
HAL_Init();
SystemClock_Config();
Serial_Config();
Led_Config();
RTCCI2C myRTCC;
myRTCC.begin();
//set the real time clock
myRTCC.stopClock();
myRTCC.setSec(RTCC_RTCC, 0x30);
myRTCC.setMin(RTCC_RTCC, 0x15);
myRTCC.setHour(RTCC_RTCC, 0x11, RTCC_PM);
myRTCC.setDay(RTCC_RTCC, 0x07);
myRTCC.setDate(RTCC_RTCC, 0x04);
myRTCC.setMonth(RTCC_RTCC, 0x03);
myRTCC.setYear(0x18);
// Set the alarm for 10 seconds after written time.
myRTCC.setSec(RTCC_ALM0, 0x40);
myRTCC.setMin(RTCC_ALM0, 0x15);
myRTCC.setHour(RTCC_ALM0, 0x11, RTCC_PM);
myRTCC.setDay(RTCC_ALM0, 0x07);
myRTCC.setDate(RTCC_ALM0, 0x04);
myRTCC.setMonth(RTCC_ALM0, 0x03);
myRTCC.enableAlarm(RTCC_ALM0, RTCC_ALMC2 | RTCC_ALMC1 | RTCC_ALMC0);
myRTCC.startClock();
while(1) {
HAL_Delay(1000);
printTime(&myRTCC, RTCC_RTCC);
}
}
 Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników
Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników  AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii
AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii  Mieszacze aktywne – ćwiczenie z serii ADALM
Mieszacze aktywne – ćwiczenie z serii ADALM 






