





Digilent Pmod i STM32 (cz. 9) – PmodNAV, PmodPMON1 i PmodTMP2
W dziewiątym i jednocześnie przedostatnim odcinku cyklu poświęconego modułom Pmod firmy Digilent przedstawione zostaną: PmodNAV z akcelerometrem, magnetometrem, żyroskopem i barometrem, PmodPMON1 służący do monitorowania mocy, a także PmodTMP2 z czujnikiem temperatury. Przykłady przedstawione w niniejszym artykule przygotowano dla środowiska Atollic TrueSTUDIO i zestawu uruchomieniowego KAmeleon (www.kameleonboard.org) z wykorzystaniem biblioteki STM32Cube_FW_L4.
PmodNAV
Moduł PmodNAV umożliwia wykonywanie pomiarów ruchu w dziewięciu osiach (3-osiowy akcelerometr, 3-osiowy żyroskop oraz 3-osiowy magnetometr), a także ciśnienia atmosferycznego. Jego sercem są dwa układy firmy ST: LSM9DS1 i LPS25HB. Zakresy pomiarowe poszczególnych wielkości są konfigurowalne i wynoszą:
- akcelerometr: ±2/±4/±8/±16 g,
- żyroskop: ±245/±500/±2000 dps,
- magnetometr: ±4/±8/±12/±16 gauss,
- barometr: 260-1260 hPa.
Rozdzielczość pomiaru ciśnienia wynosi 4096 LSB/hPa, natomiast dla pozostałych wielkości jest zależna od wybranego zakresu, a jej maksymalna wartość (dla najmniejszego zakresu) wynosi odpowiednio: 0,061 mg/LSB, 8,75 mdps/LSB i 0,14 mgauss/LSB.
Fotografia 1. Moduł PmodNAV
Możliwości czujników wbudowanych w moduł PmodNAV
Układ LSM9DS1 umożliwia generację przerwań po przekroczeniu ustawionych progów mierzonych wielkości na każdej z osi, po wykryciu aktywności, a także wówczas, gdy dostępne są nowe dane pomiarowe. Dodatkowo akcelerometr i żyroskop można skonfigurować w trybie FIFO, w którym dane pomiarowe obu czujników są buforowane w wewnętrznej kolejce. Do jej obsługi można użyć przerwań informujących o przekroczeniu zadanej liczby elementów. Czujnik ciśnienia LPS25HB charakteryzuje się podobną funkcjonalnością, pozwalającą na konfigurację progów do generacji przerwań. Posiada on także wewnętrzną kolejkę FIFO do buforowania danych pomiarowych.
Połączenie z zestawem KAmeleon
Oba układy mogą być obsługiwane za pośrednictwem interfejsów SPI oraz I2C, jednak w module PmodNAV udostępniony jest tylko pierwszy z nich. Znajduje się on na złączu Pmod typu 2A (J1), w którym oprócz linii danych oraz zegara znajdują są także trzy sygnały wybierające urządzenie (akcelerometr/żyroskop, magnetometr, barometr), wspólna linia przerwań i sygnał gotowości danych z magnetometru. Dwa ostatnie sygnały nie są używane w przykładzie, jednak ze względu na rozmieszczenie pozostałych sygnałów na złączu nie jest możliwe podłączenie modułu PmodNAV do złącza Pmod-SPI na płytce KAmeleon. Z tego względu moduł został podłączony do złącza ARDUINO według tabeli 1 i fotografii 2.
Tabela 1. Sygnały PmodNAV oraz odpowiadające im piny złącza ARDUINO i mikrokontrolera; w tabeli pominięto sygnały nieużywane w przykładzie (INT i DRDY) i linie zasilania występujące na złączu Pmod
| Sygnał | Numer pinu PmodNAV | Numer pinu KAmeleon ARDUINO CONNECTOR | Pin mikrokontrolera |
| CS_A/G | 1 | D10 | PB12 |
| MOSI | 2 | D11 | PB15 |
| MISO | 3 | D12 | PB14 |
| SCLK | 4 | D13 | PB10 |
| CS_M | 9 | D9 | PB13 |
| CS_ALT | 10 | D8 | PD11 |
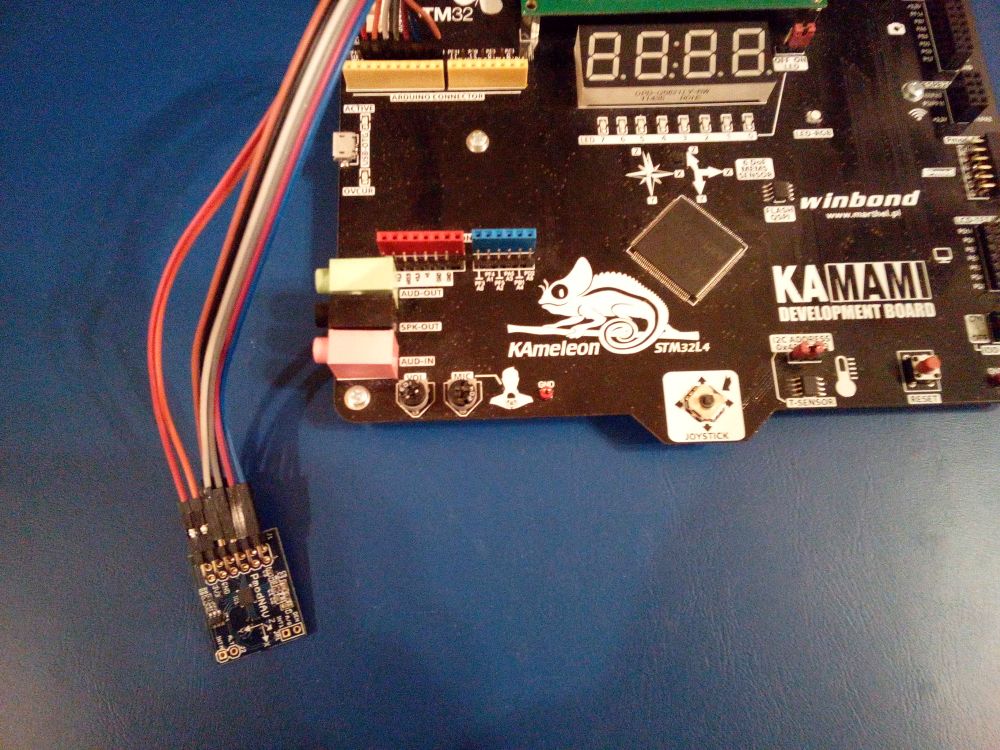 Fotografia 2. Moduł PmodNAV przyłączony do zestawu KAmeleon
Fotografia 2. Moduł PmodNAV przyłączony do zestawu KAmeleon
Kod przykładu
Przykładowy kod do obsługi modułu PmodNAV został umieszczony w plikach PmodNAV.c i PmodNAV.h. Pierwsza z funkcji – PmodNAV_Config, znajdująca się na listingu 1, jest odpowiedzialna za konfigurację interfejsu SPI w trybie 3 (CPOL=1, CPHA=1) z programową kontrolą sygnału CS. Dodatkowo, uruchamia ciągłe pomiary we wszystkich czujnikach:
- akcelerometr: 10 Hz,
- żyroskop: 14,9 Hz,
- magnetometr: 10 Hz (wartość domyślna),
- barometr: 12,5 Hz.
Linie GPIO są ustawiane w funkcji HAL_SPI_MspInit wywoływanej przez bibliotekę STM32Cube wewnątrz funkcji HAL_SPI_Init. Piny podłączone do linii danych (MISO oraz MOSI) i zegara (SCLK) są konfigurowane jako funkcja alternatywna dla SPI2, natomiast wszystkie linie CS są ustawiane jako zwykłe wyjścia i będą kontrolowane programowo. Funkcję tę przedstawiono na listingu 2.
Listing 1. Konfiguracja interfejsu SPI2 i konfiguracja modułu PmodNAV
void PmodNAV_Config(void)
{
// Configure the SPI connected to the Pmod module.
pmodNavSpi.Instance = SPI2;
pmodNavSpi.Init.Mode = SPI_MODE_MASTER;
pmodNavSpi.Init.Direction = SPI_DIRECTION_2LINES;
pmodNavSpi.Init.DataSize = SPI_DATASIZE_8BIT;
pmodNavSpi.Init.CLKPolarity = SPI_POLARITY_HIGH;
pmodNavSpi.Init.CLKPhase = SPI_PHASE_2EDGE;
pmodNavSpi.Init.NSS = SPI_NSS_SOFT;
pmodNavSpi.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_128;
pmodNavSpi.Init.FirstBit = SPI_FIRSTBIT_MSB;
pmodNavSpi.Init.TIMode = SPI_TIMODE_DISABLE;
pmodNavSpi.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE;
pmodNavSpi.Init.NSSPMode = SPI_NSS_PULSE_DISABLE;
HAL_SPI_Init(&pmodNavSpi);
writeRegisterM(0x22, 0x00); // Enable the continuous conversion mode for the magnetometer.
writeRegisterAG(0x10, 0x20); // Enable the gyroscope measurements with the 14.9Hz data rate.
writeRegisterAG(0x20, 0x20); // Enable the accelerometer measurements with the 10Hz data rate.
writeRegisterALT(0x20, 0xB0); // Enable the pressure measurements with 12.5 Hz data rate.
}
Listing 2. Konfiguracja linii GPIO dla modułu PmodNAV
void HAL_SPI_MspInit(SPI_HandleTypeDef *hspi)
{
// Initialize GPIO used by the SPI2 peripheral. All CS signals are controlled by the software.
__HAL_RCC_SPI2_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
__HAL_RCC_GPIOD_CLK_ENABLE();
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_PULLUP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF5_SPI2;
GPIO_InitStruct.Pin = GPIO_PIN_10 | GPIO_PIN_14 | GPIO_PIN_15;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_PULLUP;
// CS_A/G - PB12
GPIO_InitStruct.Pin = GPIO_PIN_12;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_12, GPIO_PIN_SET);
// CS_M - PB13
GPIO_InitStruct.Pin = GPIO_PIN_13;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_13, GPIO_PIN_SET);
// CS_ALT - PD11
GPIO_InitStruct.Pin = GPIO_PIN_11;
HAL_GPIO_Init(GPIOD, &GPIO_InitStruct);
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_11, GPIO_PIN_SET);
}
Komunikacja z czujnikami
Do komunikacji z czujnikami modułu PmodNAV przygotowano dwie funkcje pomocnicze: writeRegister i readRegister, pokazane na listingu 3. Realizują one zapis i odczyt rejestru o podanym adresie. Wszystkie czujniki wymagają podania kierunku transmisji na najstarszym bicie adresu (1– odczyt, 0 – zapis), a każda transakcja musi składać się z co najmniej dwóch bajtów. Opisywane funkcje operują na pojedynczych rejestrach, dlatego zawsze wykorzystują dwa bajty – adres oraz wartość rejestru.
Listing 3. Zapis i odczyt rejestru układów LSM9DS1 i LPS25HB
#define SPI_READ_FLAG 0x80
#define SPI_WRITE_FLAG 0x00
static void writeRegister(uint8_t address, uint8_t data)
{
// The first byte contains the address with the write flag.
uint8_t txbuf[2] = {address | SPI_WRITE_FLAG, data};
HAL_SPI_Transmit(&pmodNavSpi, txbuf, 2, 100);
}
static uint8_t readRegister(uint8_t address)
{
// Reading a byte requires the address at the beginning, so the whole SPI transaction
// has to be 2 bytes long.
uint8_t txbuf[2] = {address | SPI_READ_FLAG, 0x00};
uint8_t rxbuf[2] = {0x00};
HAL_SPI_TransmitReceive(&pmodNavSpi, txbuf, rxbuf, 2, 100);
return rxbuf[1];
}
Z powyższych funkcji korzystają inne funkcje, realizujące zapis i odczyt rejestrów. Obsługują one dodatkowo odpowiednie sygnały CS, co przedstawiono na listingu 4. Pozostałe zestawy funkcji obsługujące magnetometr i barometr wyglądają analogicznie.
Listing 4. Zapis i odczyt rejestru akcelerometru i żyroskopu
static void writeRegisterAG(uint8_t address, uint8_t data)
{
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_12, GPIO_PIN_RESET);
writeRegister(address, data);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_12, GPIO_PIN_SET);
}
// Read the Accelerometer/Gyroscope register.
static uint8_t readRegisterAG(uint8_t address)
{
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_12, GPIO_PIN_RESET);
uint8_t data = readRegister(address);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_12, GPIO_PIN_SET);
return data;
}
Konwersja danych
Pozostałe funkcje zaimplementowane w pliku PmodNAV.c odpowiadają za konwersję odczytanych wartości z czujników na wartości wyrażone w odpowiednich jednostkach:
- akcelerometr [mg],
- żyroskop [mdps],
- magnetometr [mG],
- barometr [hPa].
Jako przykład, na listingu 5 przedstawiono funkcję konwertującą dane pomiarowe z akcelerometru, w której konwersja jest przeprowadzana dla zakresu ±2 g i rozdzielczości 0.061 mg/LSB. Funkcje obsługujące pozostałe czujniki zaimplementowano w analogiczny sposób.
Listing 5. Konwersja wyników pomiaru z akcelerometru
void PmodNAV_ReadAcc(int32_t* x, int32_t* y, int32_t* z)
{
// Read the measured values from all three axes.
*x = (int16_t)((readRegisterAG(0x29) << 8) | readRegisterAG(0x28));
*y = (int16_t)((readRegisterAG(0x2B) << 8) | readRegisterAG(0x2A));
*z = (int16_t)((readRegisterAG(0x2D) << 8) | readRegisterAG(0x2C));
// Configured range is +/- 2g (default value) with 0.061 mg/LSB resolution.
*x = (*x * 1.0) * 0.061;
*y = (*y * 1.0) * 0.061;
*z = (*z * 1.0) * 0.061;
}
Główna funkcja przykładu – main, wykonuje konfigurację modułu PmodNAV, a następnie cyklicznie odczytuje wskazania wszystkich dostępnych czujników. Wyniki są wysyłane na port szeregowy LPUART1, dostępny jako wirtualny port szeregowy po podłączeniu KAmeleona do komputera. Obsługa portu znajduje się w plikach serial.c i serial.h.
 Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle
Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle  Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników
Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników  AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii
AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii 




