





Zagadnienia związane z zaopatrzeniem w komponenty do zastosowań robotycznych
Wdrażanie robotów – a także zaopatrzenie w niezbędne komponenty – wymaga wiele planowania, przygotowań i badań. Na rynku dostępnych jest wiele rodzajów robotów o różnych zaletach zależnych od ich przeznaczenia. Podczas ich wyboru należy również rozważyć dobór komponentów i wyposażenia.

Narzędzia montowane na końcu ramienia
Narzędzia montowane na końcu ramienia (EOAT), zwane również efektorami końcowymi, stanowią najważniejszą część robota. To one wykonują pracę. Wybór odpowiednich komponentów decyduje o wydajności robota w danym zastosowaniu.
Narzędziem EOAT może być na przykład chwytak, pistolet spawalniczy, rozpylacz, szlifierka lub dysza do cięcia strumieniem wody. Wiele podstawowych narzędzi montowanych na końcu ramienia (EOAT) jest wytwarzanych seryjnie, inne są projektowane przez producenta według specyfikacji klienta.
Wizyjne systemy kontroli
Nastąpił znaczny rozwój sposobu działania robotów. W przeszłości były one zaprogramowane do poruszania się między współrzędnymi bez możliwości zmiany zaprogramowanej ścieżki i dostosowania jej do położenia produktów znajdujących w nieoczekiwanym miejscu. Obecnie roboty są wyposażone w co najmniej jedną kamerę połączoną z komputerem, co pozwala im na reagowanie na produkty różniące się kształtem i rozmiarem oraz znajdujące się poza zaprogramowaną lokalizacją. Nowoczesne systemy wizyjne mogą wykrywać między innymi kolor, formę, kształt, wymiary lub temperaturę. Są powszechnie wykorzystywane do sortowania i kontroli jakości, z czym radzą sobie znacznie lepiej niż ludzie.
Wszechstronność i elastyczność systemów wizyjnych robotów komplikują wybór odpowiedniego systemu dla danego zastosowania. Aby zawęzić zakres poszukiwań, należy zwrócić uwagę na kilka podstawowych kwestii:
- 2D czy 3D: jeśli zadanie robota polega na podnoszeniu części i przenoszeniu ich w inne miejsce z zachowaniem wysokiej powtarzalności, prawdopodobnie najlepszym wyborem jest system 2D. Jeśli jednak robot musi rozróżniać orientację, a nawet wybierać części z asortymentu, wówczas lepiej sprawdzi się system 3D. Kolejną kwestią jest szybkość przetwarzania. Niektóre kamery mogą przetwarzać obrazy wewnętrznie, jeśli jednak robot ma szybko identyfikować części i przenosić je z jednego miejsca na drugie, może być konieczny zewnętrzny procesor.
- Kamera: typ kamery jest dobierany w zależności od roli widzenia maszynowego maszyny, która może polegać między innymi na kontroli ilości lub liczeniu, wykrywaniu ciał obcych i wad, a także kontroli wymiarów lub pozycji.
Zagadnienia dotyczące bezpieczeństwa
Podczas instalacji robota należy wziąć pod uwagę wiele kwestii związanych z bezpieczeństwem. Oto przykłady produktów chroniących pracowników i sprzęt:
- W przypadku stosowania robotów współpracujących pracownicy będą wchodzić w strefę ruchu robota i jej okolicę. Wtedy konieczne będzie utworzenie stref określających maksymalną prędkość ruchu robota. Strefy te są często wyznaczane za pomocą skanera bezpieczeństwa wyposażonego w laser służący do wykrywania obiektów w zakresie 360 stopni.
- Kurtyny świetlne wykrywają, czy przeszkoda, taka jak na przykład ręka pracownika, znalazła się w polu, gdzie może dojść do obrażeń.
- Urządzenia detekcyjne, np. maty i czujniki, wykrywają obecność operatora w potencjalnie niebezpiecznej strefie. Mogą też wyłączyć robota w celu uniknięcia obrażeń ciała.
Nabywając komponenty robotyczne, należy rozważyć wiele kwestii. Firma Digi-Key oferuje produkty wiodących marek automatyki, zestawy robotów i komponenty robotyczne, umożliwiając realizację pomysłów na całym świecie. W Digi-Key oczekujemy nowych produktów, jakie wprowadzą wkrótce na rynek wiodący dostawcy rozwiązań automatyki. Będziemy również wdrażać wiele z tych innowacji w naszej działalności, aby zapewnić jej skalowalność i sukces.
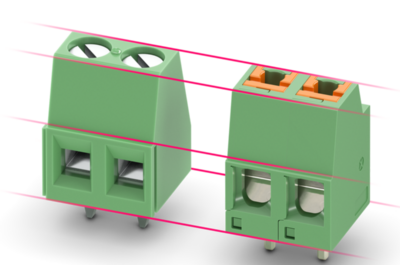 Zmiana technologii przyłączeniowej bez modyfikacji PCB? Konstrukcja TWIN w terminalach SPTH od Phoenix Contact
Zmiana technologii przyłączeniowej bez modyfikacji PCB? Konstrukcja TWIN w terminalach SPTH od Phoenix Contact 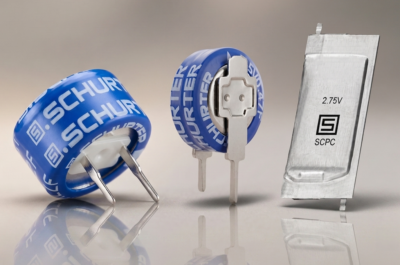 Nowość w ofercie firmy SCHURTER: superkondensatory – ultrakompaktowe i jednocześnie niezwykle wydajne
Nowość w ofercie firmy SCHURTER: superkondensatory – ultrakompaktowe i jednocześnie niezwykle wydajne  Dyrektywy ATEX a materiały wybuchowe – gdzie kończy się zakres przepisów?
Dyrektywy ATEX a materiały wybuchowe – gdzie kończy się zakres przepisów? 

![O konkursie organizowanym przez firmę TRUMPF Huettinger i polskie uczelnie techniczne opowiada Alicja Peresada i prof. Jacek Rąbkowski oraz kilkoro nagrodzonych dyplomantów: mgr inż. Jakub Dobosz, inż. Maja Zielińska, dr inż. Jakub Kołodziej, dr inż Weronika Hryniewska-Guzik i dr inż. Grzegorz Bartyzel. Zapraszamy do obejrzenia filmu! [materiał redakcyjny]](https://mikrokontroler.pl/wp-content/uploads/2026/07/TRUMPF-czolowka.png "https://www.youtube.com/watch?v=XkeyLmtLfxo")



