





ADMT4000 – układ do pomiaru ruchu wieloobrotowego bez zasilania i bez kontaktu
Obecne na rynku obrotowe czujniki położenia i enkodery zapewniają absolutny zakres pomiarowy jednego obrotu lub 360°. Systemy, które wymagają zakresu pomiarowego obejmującego wiele obrotów, zazwyczaj wykorzystują nieporęczne rozwiązania mechaniczne lub zapasowe źródło zasilania do śledzenia ruchu podczas wyłączenia zasilania. Innowacyjny czujnik ADMT4000 firmy ADI to pierwszy na rynku jednoukładowy wieloobrotowy czujnik położenia z absolutnym zakresem pomiarowym 46 obrotów (16560 stopni) i dokładnością do 0,25 stopnia. Pozwoli on zrewolucjonizować projektowanie siłowników, eliminując potrzebę stosowania przetworników liniowych, nieporęcznych mechanizmów przekładni redukcyjnych lub konieczności ciągłego zasilania systemu. ADMT4000 znacznie usprawnia proces projektowania siłowników i napędów, umożliwiając zmniejszenie rozmiaru, wagi i kosztów końcowego sprzętu.
Nowy produkt ma szerokie zastosowanie rynkowe, a docelowi odbiorcy sektora przemysłowego to producenci siłowników i napędów, enkoderów przemysłowych oraz producenci urządzeń automatyki przemysłowej, w tym robotów, Cobotów i humanoidów. Zainteresowani tym układem będą również producenci czujników i siłowników samochodowych, sprzętu lotniczego i obronnego oraz producenci sprzętu medycznego, takiego jak roboty chirurgiczne, skanery i fotele dentystyczne.
Jak używać ADMT4000?
ADMT4000 może być traktowany jako pamięć magnetyczna połączoną z konwencjonalnym magnetycznym czujnikiem kąta. Konstrukcja zapewnienia bardzo dokładne określenie pozycji bezwzględnej. Proces zapisu magnetycznego opisany w „Multiturn Position Sensor Provides True Power-On Capabilities with Zero Power” wymaga utrzymania padającego pola magnetycznego w określonym oknie roboczym. Błędy zapisu magnetycznego mogą wystąpić, jeśli pole magnetyczne jest zbyt wysokie lub zbyt niskie. Niezbędne jest staranne zaprojektowanie magnesu systemowego i uwzględnienie wszelkich rozproszonych pól magnetycznych, które mogą zakłócać działanie czujnika, a także tolerancji mechanicznych w całym okresie eksploatacji produktu. Małe rozproszone pola magnetyczne mogą powodować błąd mierzonego kąta, podczas gdy większe rozproszone pola magnetyczne będą powodować błąd zapisu magnetycznego prowadzący do rażącego błędu zliczania obrotów.
Cele projektu magnetycznego układu odniesienia
Dokładne zrozumienie wymagań systemowych jest niezbędne do zaprojektowania optymalnego magnesu i ekranowania. Ogólnie, im mniejsze wymagania systemowe, tym większe i droższe rozwiązanie magnetyczne wymagane do osiągnięcia docelowych specyfikacji. Analog Devices opracowuje dla klientów czujnika wieloobrotowego ADI MagIC+ serię magnetycznych projektów referencyjnych spełniających różne wymagania mechaniczne, dotyczące pola rozproszonego i temperatury. Pierwszy projekt opracowany przez ADI obejmuje systemy o stosunkowo luźnych tolerancjach: umiejscowienie czujnika względem magnesu 2,45 mm ±1 mm, całkowite przesunięcie czujnika względem osi obrotu ±0,6 mm, zakres temperatur pracy od -40˚C do +150˚C oraz tłumienie pola magnetycznego powyżej 90%.
Materiał magnesu
Czujnik GMR działa w określonym oknie magnetycznym (od 16 mT do 31 mT)1. Ponadto maksymalny i minimalny zakres roboczy ma określony współczynnik termiczny (TC), co jest widoczne na czerwonych krzywych na rys. 1. Wybór materiału magnesu z TC, który jest odpowiedni dla czujnika GMR, zwiększy do maksimum dozwoloną zmienność działającego pola magnetycznego. Pozwoli to na większą zmienność siły magnesu i/lub tolerancję umieszczenia magnesu względem czujnika. Tanie materiały magnetyczne, takie jak ferryty, mają znacznie wyższy TC niż czujnik GMR, co ograniczyłoby zakres temperatur roboczych w porównaniu z materiałami takimi jak samarowo-kobaltowy (SmCo) lub neodymowo-żelazoborowy (NeFeB).
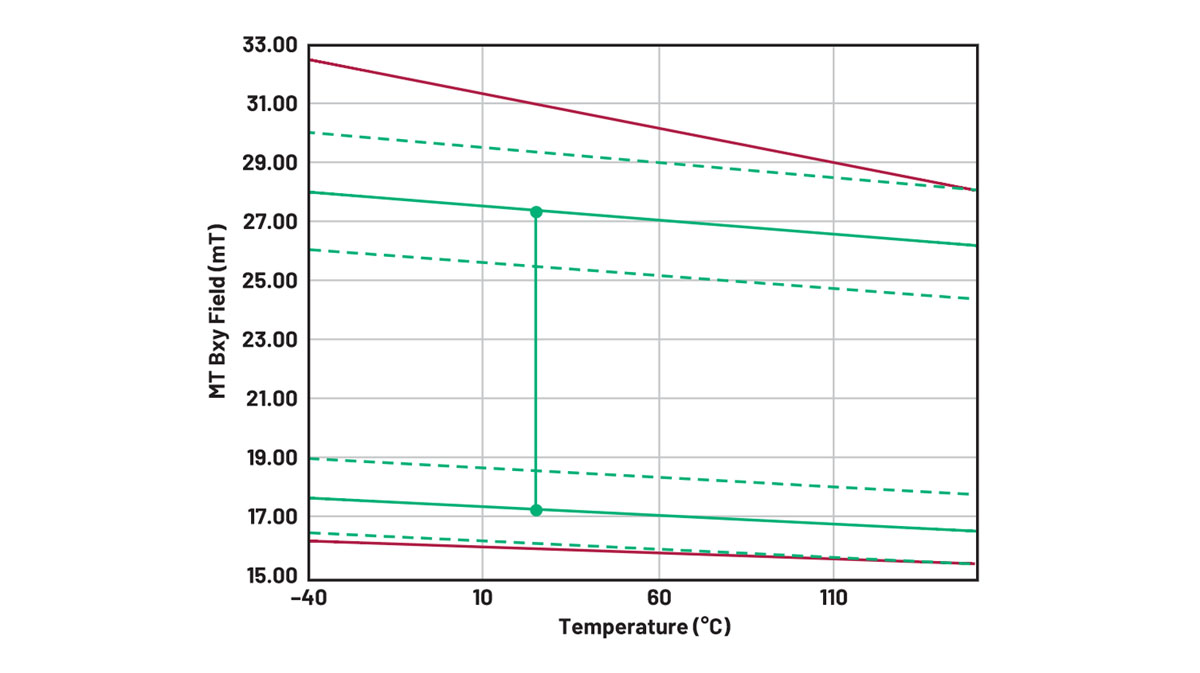
Rys. 1. Porównanie współczynnika termicznego okna roboczego z typowym magnesem SmCo
Zrozumienie TC wybranego materiału magnetycznego, a także zmienności natężenia pola magnetycznego ze względu na różnice produkcyjne pozwala na określenie wymaganego natężenia pola magnetycznego w temperaturze pokojowej (25°C). Symulacje projektowe można następnie przeprowadzić w temperaturze pokojowej z wysokim stopniem pewności, że system będzie działał zgodnie z oczekiwaniami w pełnym zakresie temperatur. Na rys. 1 ciągłe zielone krzywe reprezentują okno natężenia pola magnetycznego, które magnes powinien wytwarzać w aktywnym obszarze czujnika GMR. Okno to jest zmniejszone w stosunku do maksymalnego i minimalnego okna roboczego czujnika GMR ze względu na różnice w procesie produkcji materiału magnetycznego. Zielone przerywane linie pokazują maksymalne i minimalne oczekiwane pole magnetyczne ze względu na typowe odchylenia produkcyjne >5%.
Symulacja magnesu
Symulacja magnesu w mechanicznym środowisku roboczym może przybierać różne formy. Do projektowania magnesu są stosowane powszechnie dwa rodzaje symulacji: symulacja analityczna lub analiza elementów skończonych (MES). Symulacja analityczna rozwiązuje pole magnetyczne przy użyciu masowych parametrów symulowanego magnesu (rozmiar, materiał) bez uwzględniania otoczenia innego niż założenie, że działa on w powietrzu. Jest to szybkie obliczenie i przydatne, gdy nie ma sąsiednich materiałów ferromagnetycznych. MES może modelować wpływ materiału ferromagnetycznego w większym systemie magnetycznym, co jest niezbędne w przypadku łączenia magnesu z ekranem rozproszonego pola magnetycznego lub materiałami ferromagnetycznymi w pobliżu magnesu lub czujnika. MES jest procesem czasochłonnym, więc zwykle punktem wyjścia jest podstawowy projekt magnesu z analizy analitycznej. Metoda elementów skończonych została zastosowana w symulacji projektu referencyjnego magnesu i ekranowania pola rozproszonego.
Cechy konstrukcyjne magnesu
W konstrukcji referencyjnej przyjętej na podstawie symulacji zastosowano magnes SmCo ze zintegrowanym stalowym ekranem pola rozproszonego, jak pokazano na rys. 2. Magnes został zaprojektowany do formowania wtryskowego, dzięki czemu może być produkowany masowo. Formowanie wtryskowe magnesów SmCo jest powszechne ze względu na możliwość wytwarzania złożonych kształtów i jest szeroko stosowane w zastosowaniach motoryzacyjnych i przemysłowych. Zespół został zaprojektowany tak, aby był dopasowany do wału o średnicy 9 mm. Dopuszczalne są jednak modyfikacje tulei umożliwiające mocowanie do wałów o różnych rozmiarach.

Rys. 2. Magnes o konstrukcji referencyjnej
Charakterystyka magnesu
Aby zademonstrować solidne rozwiązanie magnetyczne dla czujnika GMR, przeprowadzono dokładną charakterystykę zespołów magnesów. Kluczem do charakteryzacji jest możliwość wykonania szczegółowych map natężenia pola magnetycznego w rozszerzonym oknie umieszczenia magnesu i czujnika w środowisku kontrolnym. konieczne jest przy tym dobre zrozumienie i kalibracja zastosowanych sond pola magnetycznego. Na rys. 3 został przedstawiony przykład zmierzonego natężenia pola przy dwóch różnych szczelinach powietrznych. Powtarzanie tych pomiarów w pełnym zakresie temperatur roboczych i zakresie szczelin powietrznych jest czasochłonne, ale ma zasadnicze znaczenie dla zrozumienia działania magnesu pozwalające zapewnić jego działanie w wymaganych warunkach.
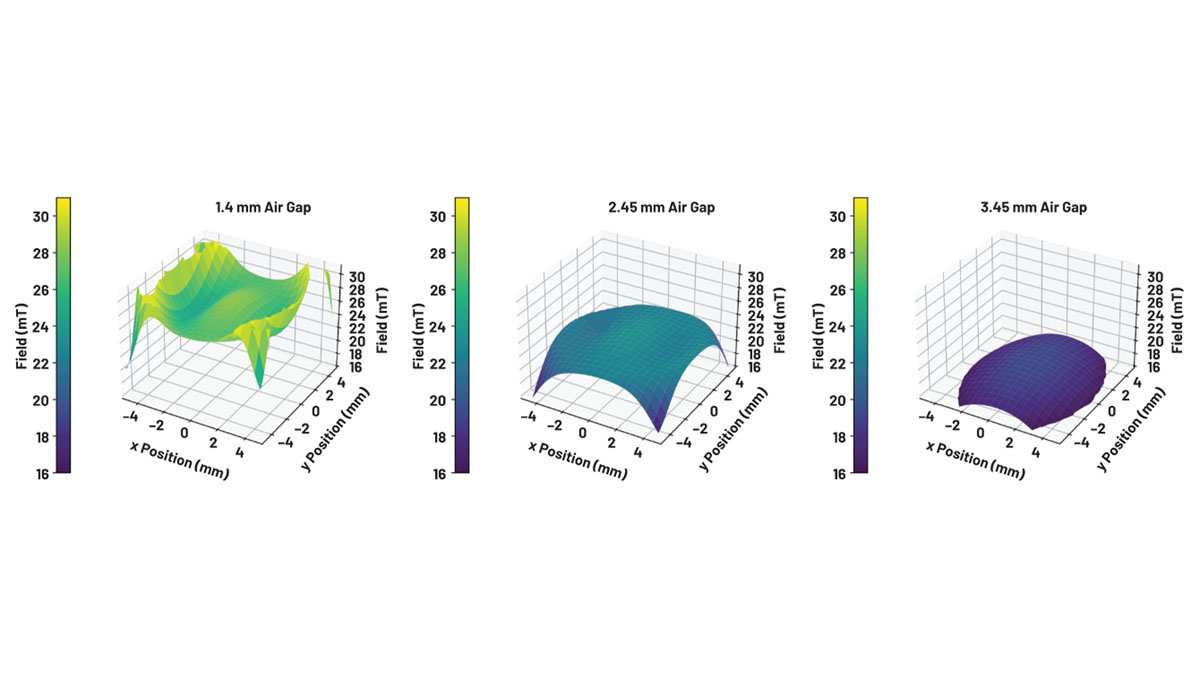
Rys. 3. Rozkład pola magnetycznego przy szczelinie powietrznej 1,42 mm i 2,45 mm
Podsumowanie
Podsumowując, wykazano, że magnes o konstrukcji referencyjnej spełnia wymagania dotyczące pracy w temperaturze od -40°C do +150°C, przy szczelinie powietrznej 2,45 mm ±1 mm i tolerancji osiowej względem czujnika ±0,6 mm. Szczegółów dotyczących ekranowania magnetycznego pola rozproszonego należy szukać w kolejnych artykułach.
Wieloobrotowy czujnik ADI MagIC+ jest pierwszym zintegrowanym wieloobrotowym czujnikiem położenia z prawdziwym zasilaniem i ma znacznie zmniejszyć złożoność i wysiłek związany z projektowaniem systemu, co ostatecznie zaowocuje mniejszymi, lżejszymi i tańszymi rozwiązaniami. Projekt referencyjny będzie dostępny dla klientów ADI, aby umożliwić projektantom dodanie nowych i ulepszonych funkcji do obecnych aplikacji i otworzyć drzwi do wielu nowych zastosowań.
Źródło: informacje firmy Analog Decices i artykuł „Magnet Design for Giant Magnetoresistance Multiturn Position Sensors”, którego autorami są Stephen Bradshaw, Christian Nau i Enda Nicholl.
 Pomiar rezonansu własnego cewki indukcyjnej zestawem Analog Discovery2
Pomiar rezonansu własnego cewki indukcyjnej zestawem Analog Discovery2  Premiera przyrządu pomiarowego Digilent Analog Discovery Pro ADP2230
Premiera przyrządu pomiarowego Digilent Analog Discovery Pro ADP2230  Platforma precyzyjnego toru sygnałowego Analog Devices z obsługą szerokiego zakresu czujników
Platforma precyzyjnego toru sygnałowego Analog Devices z obsługą szerokiego zakresu czujników 






