





KAmod Motor Driver – Uniwersalny sterownik silnika elektrycznego
W dzisiejszej elektronice bardzo ważnym aspektem projektowania jest umiejętność sterowania silnikami elektrycznymi. Są one stosowane w wielu różnych aplikacjach, m.in. w liniach przemysłowych, automatyce, robotyce, urządzeniach AGD, samochodach, systemach HVAC oraz wielu innych współczesnych urządzeniach. W takich aplikacjach wykorzystuje się różne typy silników, takie jak: silniki prądu stałego, silniki krokowe, silniki bezszczotkowe czy serwomechanizmy. Każdy z nich jest dobierany w zależności od wymagań dotyczących precyzji, momentu obrotowego, prędkości oraz sposobu sterowania.
Znakomita większość mikrokontrolerów i mikroprocesorów nie jest w stanie bezpośrednio dostarczyć odpowiedniej mocy do silników. Do tego celu służą osobne układy sterowników silników, które umożliwiają dostarczenie odpowiedniego zasilania oraz kontrolę parametrów pracy napędów, w szczególności ich prędkości, kierunku obrotu, momentu oraz hamowania. Są one niezbędnym elementem systemów elektronicznych, w których używa się silników elektrycznych.
Większość sterowników silników DC bazuje na układzie mostka H. To układ elektroniczny składający się z czterech przełączników (np. tranzystorów), który umożliwia zmianę kierunku przepływu prądu przez silnik, a tym samym kierunku jego obrotów. Nazwa pochodzi od schematycznego układu elementów, który przypomina literę „H”, gdzie silnik znajduje się pomiędzy dwoma gałęziami. W zależności od tego, które pary przełączników są zamknięte, prąd płynie przez silnik w jednym lub drugim kierunku. Dodatkowo, sterując napięciem zasilającym lub stosując modulację szerokości impulsu (PWM), możliwa jest regulacja prędkości obrotowej silnika.
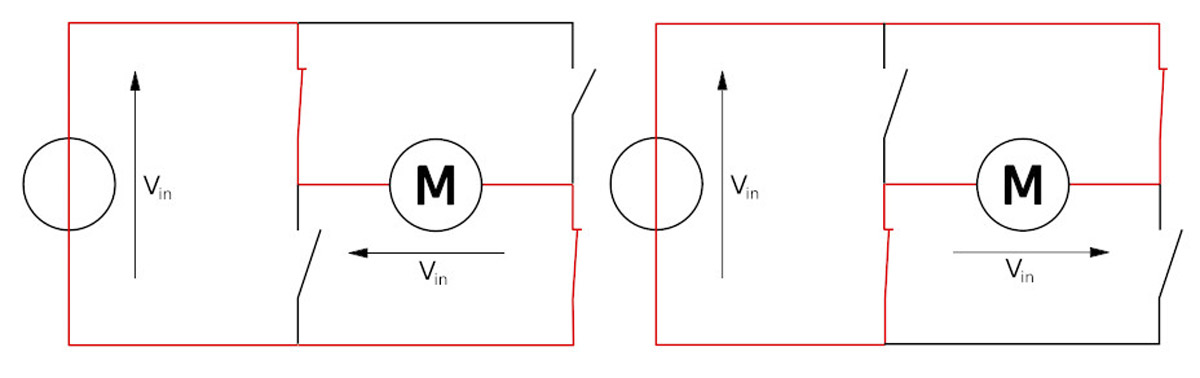
Rys. 1. Schemat sterownika silników w układzie mostka H (Źródło: wikipedia.org)
W niniejszym artykule przedstawimy przykład praktycznej realizacji sterownika silników DC – moduł KAmod Motor Driver. Produkt ten został zaprojektowany przez polskie biuro konstrukcyjne Kamami.pl. Pozwala na sterowanie silników napięciem do 30 V i kontrolę prędkości zarówno przez PWM, jak i sygnał analogowy. Rozwiązanie sprawdzi się w projektach z zakresu robotyki, automatyki przemysłowej, mechatroniki i tym podobnych aplikacji.
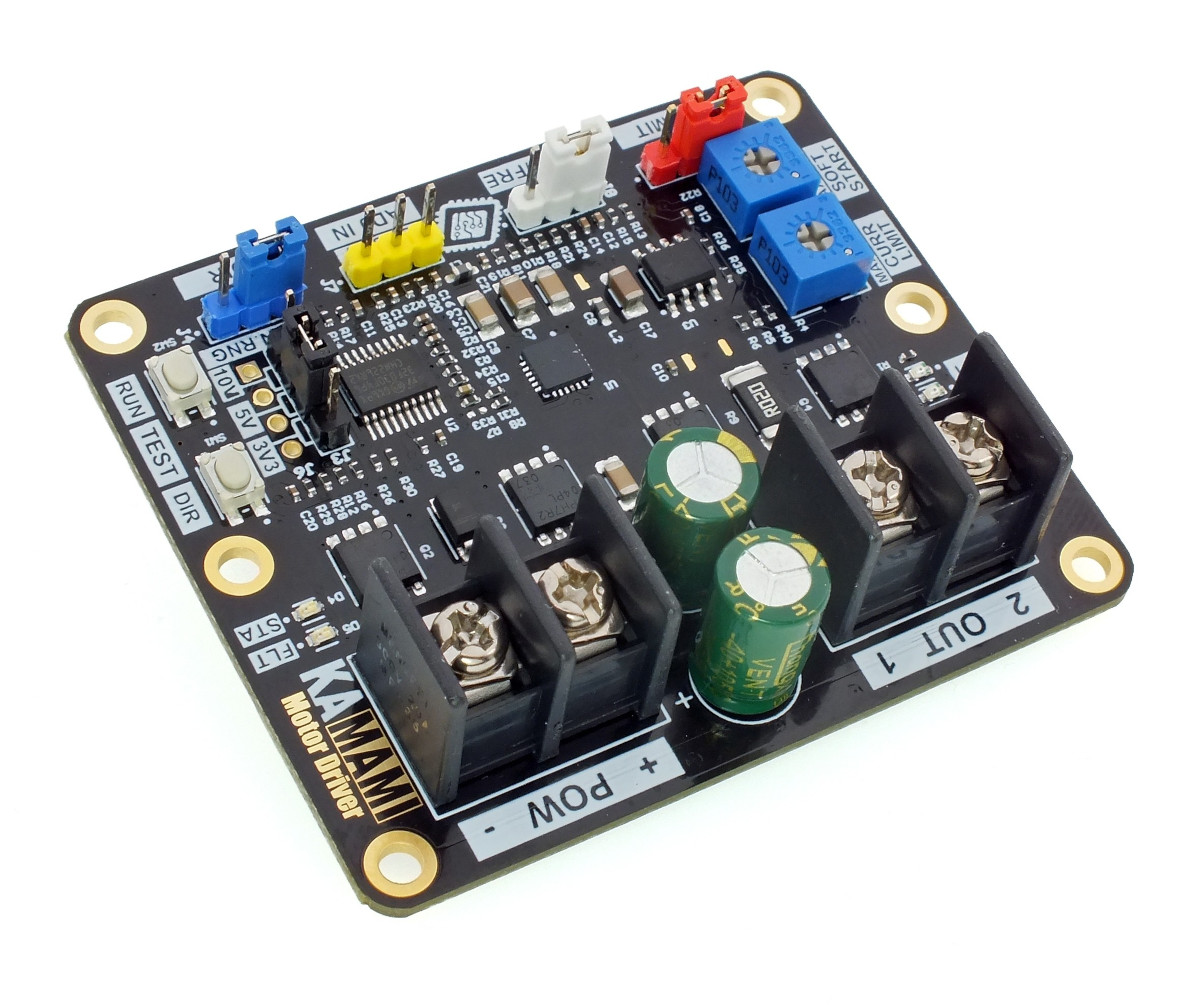
Rys.2. Moduł sterownika silnika KAmod Motor Driver
KAmod Motor Driver – uniwersalny sterownik silnika elektrycznego
Głównym elementem płytki Motor Driver jest sterownik silników DC DRV8701P firmy Texas Instruments. To zaawansowany sterownik przeznaczony do współpracy z zewnętrznym mostkiem H opartym na tranzystorach MOSFET. Umożliwia precyzyjne sterowanie silnikami prądu stałego oraz silnikami bezszczotkowymi (w konfiguracjach pół-mostkowych), zapewniając funkcje regulacji prędkości, kierunku obrotów i hamowania. W układzie DRV8701P zostały zintegrowane zabezpieczenia przed przeciążeniem, przegrzaniem, zbyt wysokim napięciem zasilania i zwarciem. Układ jest wyposażony także w wejście PWM do sterowania prędkością oraz wzmacniacz błędu prądu, który pozwala na precyzyjne sterowanie momentem obrotowym.
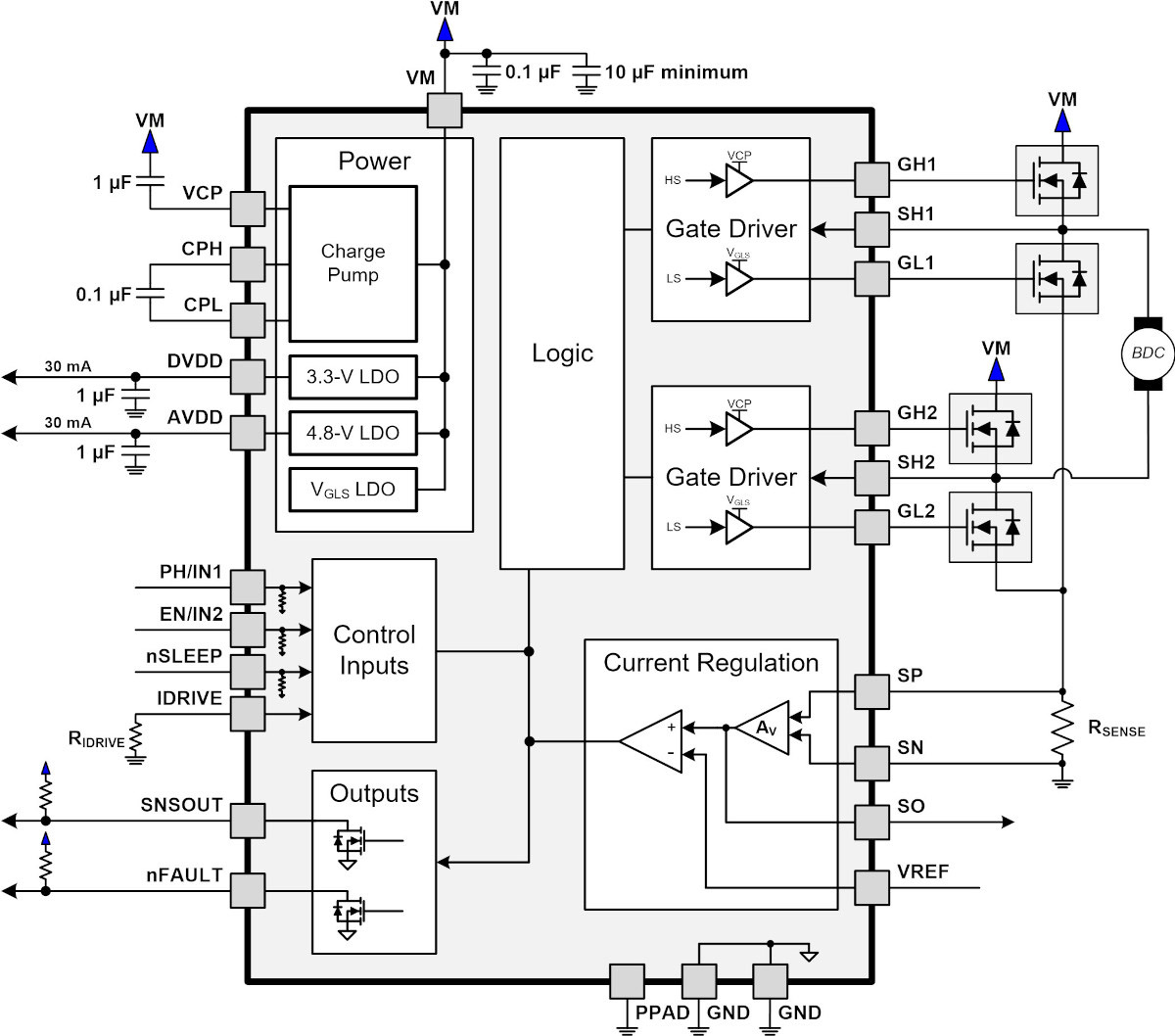
Rys. 3. Schemat blokowy sterownika DRV8701P
Sam mostek H sterowany przez układ DRV8701P składa się z tranzystorów MOSFET, które przełączają napięcie zasilania ze złącza POW do wyjścia OUT do silnika. Układ można zasilać napięciem z zakresu 6…30 V i dostarczyć do silnika prąd nawet do 15 A. Pozwala to wygenerować już całkiem dużą moc do silnika elektrycznego.
Do sterownika można podłączyć sygnał wejściowy w jednym z trzech zakresów napięciowych: 0…3,3 V; 0…5 V lub 0…10 V. Do sterowania może być użyty sygnał analogowy lub PWM o częstotliwości od 200 Hz do 50 kHz, który jest generowany np. przez mikrokontrolery lub procesory, takie jak Arduino, Raspberry Pi, STM32, RP2040 i inne popularne platformy, również te przemysłowe (w zakresie 0…10 V). Do złącza wejściowego ADJ IN można też dołączyć sygnał analogowy, np. z potencjometru. Dołączenie potencjometru jest też ułatwione dzięki wyprowadzeniu napięcia 3,3 V na jeden z pinów portu wejściowego. Zakres napięcia wejściowego można regulować za pomocą zworki IN.RNG.
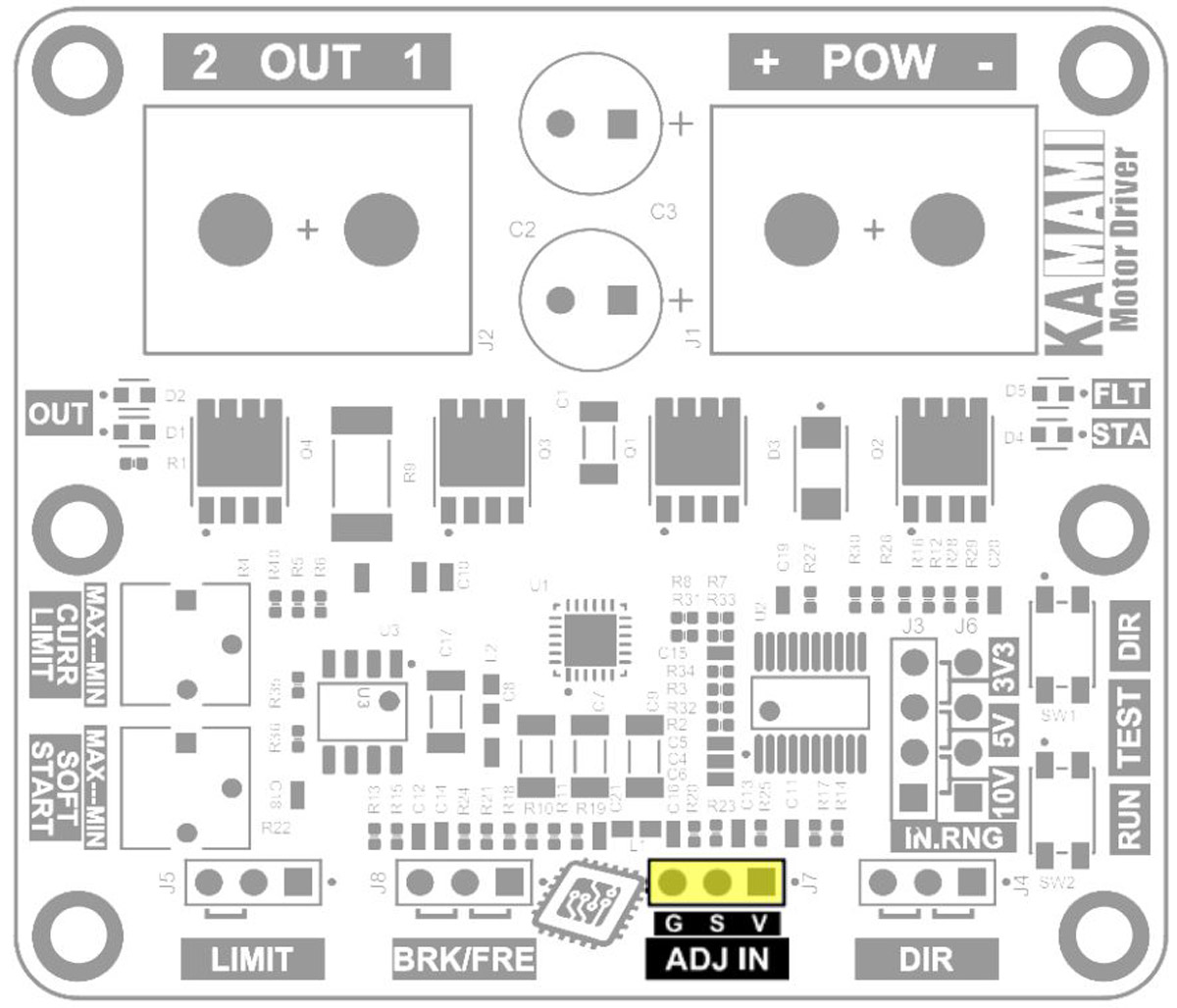
Rys. 4. Złącze ADJ IN oznaczone na schemacie płytki KAmod Motor Driver
Dodatkowe funkcje obsługi silnika
Płytka KAmod Motor Driver zawiera jeszcze kilka portów, które umożliwiają obsługę niektórych funkcji sterownika za pomocą zworek lub pinów cyfrowych GPIO. Jedno z nich, port DIR, pozwala wybrać polaryzację napięcia wyjściowego do silnika, a tym samym kierunek ruchu wirnika. Użytkownik, ustawiając pozycję zworki lub też poziom linii 2. portu DIR jest w stanie wybrać kierunek pracy silnika. Odwrócenie polaryzacji (na wyjściu OUT 1 będzie masa zasilania, a na wyjściu OUT 2 – potencjał dodatni) następuje przy ustawieniu zworki w pozycję zwierającą piny 2 i 3, lub zwarciu pinu 2 do masy. Pin 2 jest „podciągnięty” do napięcia 3,3 V, a więc złącze pozostawione wolne ustawi kierunek polaryzacji w pozycji klasycznej (na wyjściu OUT 1 będzie potencjał dodatni, a na wyjściu OUT 2 – masa zasilania).
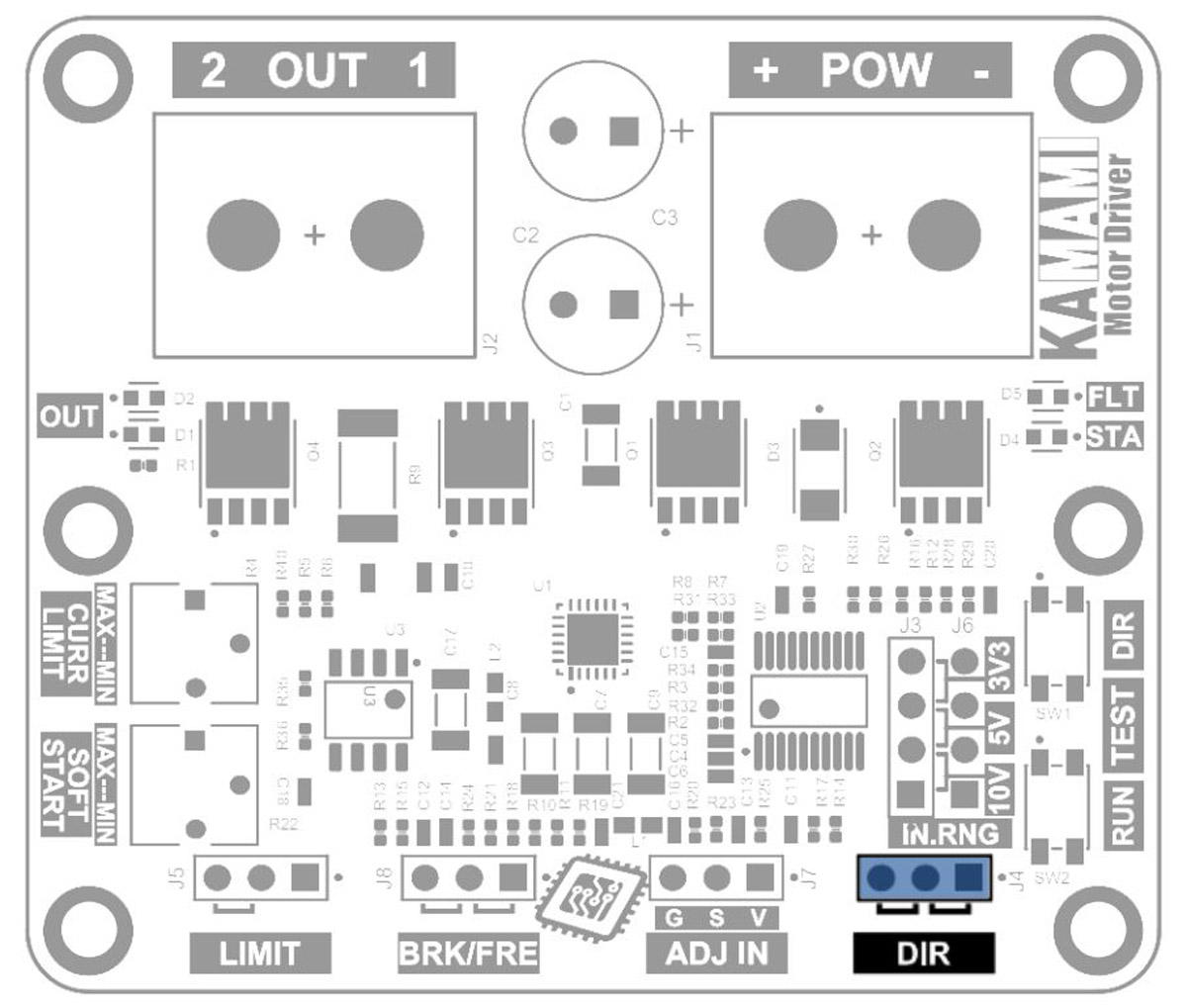
Rys. 5. Złącze DIR zaznaczone na schemacie płytki KAmod Motor Driver
Za pomocą złącza LIMIT można wymusić zatrzymacie pracy silnika. Moc wyjściowa jest wtedy ustawiana na wartość 0% niezależnie od sygnału sterującego doprowadzonego na wejście ADJ IN. Aby wyłączyć silniki należy podać na środkowy pin napięcie masy lub zewrzeć z pinem 3 złącza. Pin jest normalnie „podciągnięty” do napięcia 3,3 V, a więc jeśli nie jest podłączony, nie wyłączy pracy silnika.
Po zatrzymaniu silnika w ten sposób, ponowne uruchomienie jest możliwe po spełnieniu jednego z 2 warunków:
- zostanie zmieniony kierunek obrotów poprzez zmianę stanu na złączu DIR. Silnik rozpocznie pracę w przeciwnym kierunku, nawet jeśli sygnał na złączu LIMITpozostaje w stanie aktywnym w momencie zmiany kierunku.
- sygnał sterujący na złączu ADJ INosiągnie wartość zerową oraz sygnał na złączu LIMIT przejdzie w stan nieaktywny. Po ponownym zwiększeniu sygnału na złączu ADJ IN silnik rozpocznie pracę w dowolnie ustawionym kierunku.
Wybór sposobu zatrzymania silnika można dokonać za pomocą złącza BRK/FRE. Dostępne są dwie opcje:
- zatrzymanie swobodne– zwarte szpilki 1-2 (po prawej stronie). Zasilanie silnika jest odłączane i silnik wytraca prędkość, aż do zatrzymania;
- zatrzymanie z hamowaniem– zwarte szpilki 2-3 (po lewej stronie). Zasilanie silnika jest odłączane, a jego zaciski zasilające są zwierane do masy, co powoduje gwałtowne wyhamowanie silnika.
Włączona funkcja zatrzymania z hamowaniem powoduje, że przy zerowym sygnale sterującym na złączu ADJ IN, silnik jest również blokowany – jego zaciski zasilające są zwierane do masy, co znacznie utrudnia jego obracanie za pomocą zewnętrznej siły.
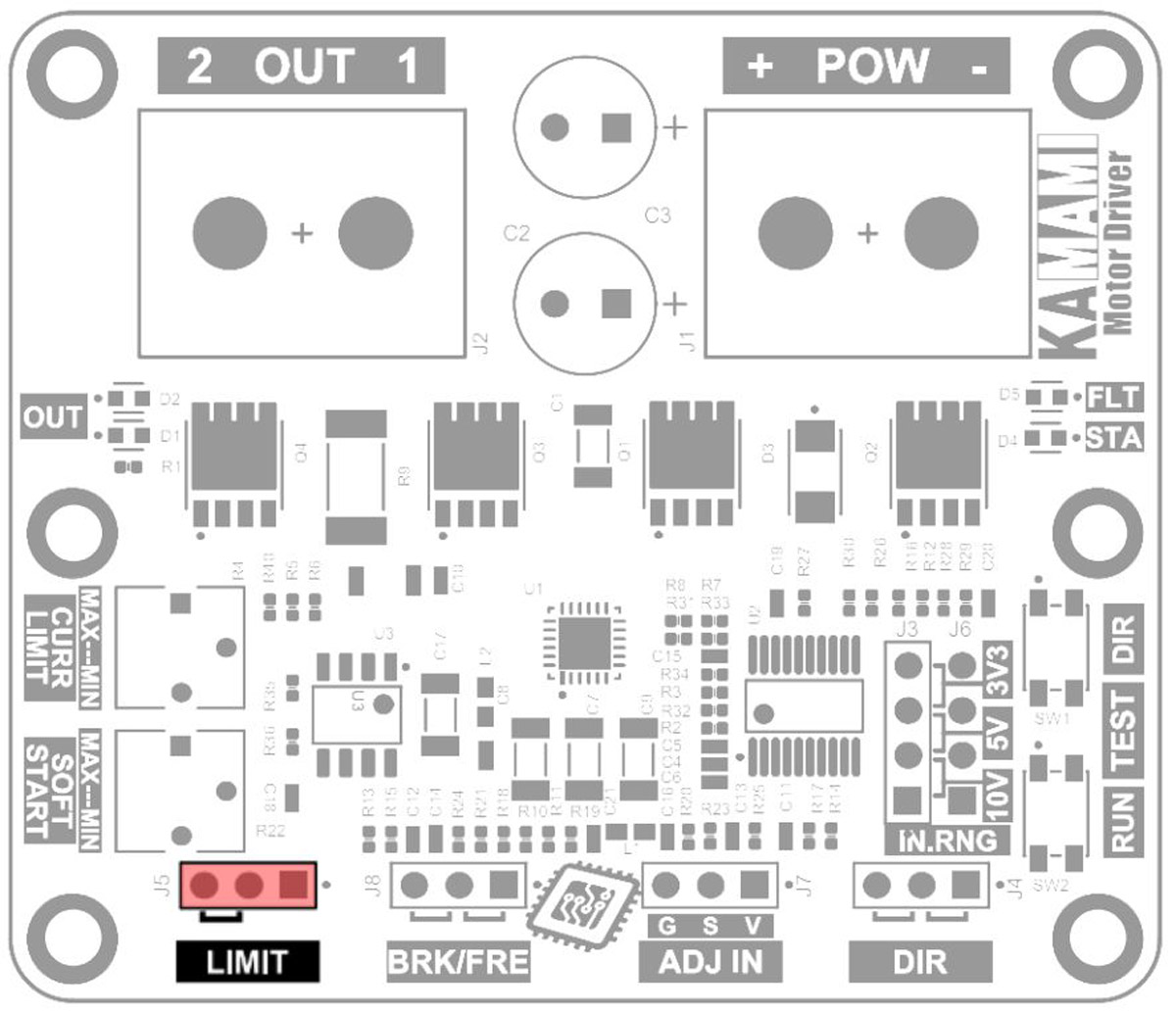
Rys. 6. Złącze LIMIT zaznaczone na schemacie płytki KAmod Motor Driver
Funkcje do szybkiego testowania sterowania silników
Sterownik silnika KAmod Motor Driver można łatwo przetestować za pomocą dwóch przycisków microswitch umieszczonych na płytce:
- TEST RUN– wciśnięcie przycisku powoduje ustawienie mocy wyjściowej 100%, niezależnie od poziomu sygnału na złączu ADJ IN;
- TEST DIR– wciśnięcie przycisku powoduje zmianę kierunku obrotów, jeśli złącze DIR nie jest wysterowane zewnętrznym sygnałem.
Te funkcje pozwalają przetestować układ sterownika silnika, ale też sam silnik oraz połączenie między elementami systemu.
Sterownik silnika KAmod Motor Driver realizuje również funkcję SOFT START, która obejmuje: łagodny rozruch, łagodną zmianę prędkości, a także płynną zmianę kierunku obrotów (z etapami łagodnego hamowania, zatrzymania i łagodnego rozruchu). Intensywność działania powyższych funkcji określa położenie potencjometru oznaczonego SOFT START. W zakresie od pozycji MIN do MAX czas rozruchu z poziomu 0% do 100% jest regulowany w zakresie od 1 sekundy do 4 sekund.
Moduł realizuje także funkcję zabezpieczenia przed przeciążeniem CURRENT LIMIT, która uniemożliwia przepływ zbyt dużego prądu przez sterownik oraz silnik. Poziom ograniczenia jest określony położeniem potencjometru oznaczonego CURR LIMIT. W zakresie od pozycji MIN do MAX wartość prądu jest regulowana w zakresie ok. 2…15 A. Działanie ograniczenia jest sygnalizowane miganiem czerwonej diody sygnalizacyjnej FLT.
Płytka sterownika silnika KAmod Motor Driver ma wymiary 65 mm × 56 mm i wysokość ok. 21 mm.
Dokumentacja
Producent udostępnił rozbudowaną dokumentację modułu na stronie: https://wiki.kamamilabs.com/index.php/KAmod_Motor_Driver_(PL). Zawiera ona m.in. schemat elektryczny płytki, dane techniczne oraz bardzo dużo wskazówek ułatwiających pracę z modułem.
Podsumowanie
Płytki KAmod Motor Driver to nowoczesny sterownik silników DC oparty o układ scalony DRV8701P. Umożliwia sterowanie napięciem do 30 V oraz prąd wyjściowy do 15 A. Pozwala na sterowanie sygnałem PWM, który można generować z wszystkich najpopularniejszych platform rozwojowych, takich jak Arduino, Raspbery Pi, STM32, RP2040 czy systemy przemysłowe. Sterownik sprawdzi się w szerokim zakresie aplikacji, takich jak robotyka, automatyka przemysłowa czy nawet aplikacje automotive. Moduł oferuje szereg dodatkowych funkcji, które ułatwiają efektywne sterowanie silnikiem.
Płytki KAmod Motor Driver można kupić w sklepie internetowym Kamami.pl.
 Moduły Kamami z przekaźnikami dla Raspberry Pi Pico
Moduły Kamami z przekaźnikami dla Raspberry Pi Pico  Nowe drukarki 3D Artillery w ofercie Kamami
Nowe drukarki 3D Artillery w ofercie Kamami 

![O konkursie organizowanym przez firmę TRUMPF Huettinger i polskie uczelnie techniczne opowiada Alicja Peresada i prof. Jacek Rąbkowski oraz kilkoro nagrodzonych dyplomantów: mgr inż. Jakub Dobosz, inż. Maja Zielińska, dr inż. Jakub Kołodziej, dr inż Weronika Hryniewska-Guzik i dr inż. Grzegorz Bartyzel. Zapraszamy do obejrzenia filmu! [materiał redakcyjny]](https://mikrokontroler.pl/wp-content/uploads/2026/07/TRUMPF-czolowka.png "https://www.youtube.com/watch?v=XkeyLmtLfxo")



