





[RAQ] Uproszczenie pokładowych systemów bezpieczeństwa oraz zwiększenie wydajności wideo dzięki zastosowaniu GMSL
Pytanie: Jakie zalety techniczne mają rozwiązania używające interfejsu komunikacyjnego GMSL™ (Gigabit Multimedia Serial Link) w porównaniu z tradycyjnymi łączami transmisji wideo (kamery analogowe i kamery IP)? Jakie potencjalne możliwości można uzyskać korzystając z GMSL?
Odpowiedź: Tradycyjne rozwiązania służące do transmisji wideo, takie jak kamery analogowe (z kodowaniem CVBS), mają rozdzielczość wideo 480i (480 linii z przeplotem), i nie umożliwiają kodowania sygnałów sterujących, ani przesyłania zasilania kablami koncentrycznymi. Ograniczenia projektowe dla klientów z branży bezpieczeństwa wynikają ponadto z dużych opóźnień i wysokich kosztów kamer IP. Problemów tych można uniknąć stosując protokół GMSL, którym można przesyłać sygnały wideo, sygnały sterujące i zasilanie za pomocą kabli koncentrycznych z maksymalną przepustowością 12 Gb/s. Oznacza to, że GMSL poprawia wydajność transmisji wideo, jednocześnie znacznie obniżając koszty materiałów.
Czym jest pokładowy system bezpieczeństwa?
Pokładowe systemy bezpieczeństwa są przeznaczone do inteligentnego monitorowania, wydawania dyspozycji i reagowania w sytuacjach awaryjnych w autobusach, taksówkach, ciężarówkach i innych rodzajach pojazdów. System monitoruje w czasie rzeczywistym wnętrze pojazdu i otoczenie oraz precyzyjnie określa położenie pojazdu. Funkcje analizy wideo systemu zapewniają szybkie i dokładne wykrywanie nieprawidłowych zachowań podczas jazdy, i natychmiast ostrzegają kierowcę, chroniąc go i pasażerów przed potencjalnymi wypadkami. Rejestrowane mogą być stosunkowo niegroźne zdarzenia, jak kradzież kieszonkowa, ale też dużo bardziej niebezpieczne, jak wypadek drogowy. Nagrania wideo zawierające kluczowe dane mogą zostać przekazane organom ścigania jako dowody kryminalistyczne.
Na rysunku 1 przedstawiono typowy schemat blokowy systemu bezpieczeństwa pokładowego składającego się z rejestratorów wideo, kamer i monitorów.

Rys. 1. Schemat blokowy systemu bezpieczeństwa pokładowego
Cyfrowy rejestrator wideo (DVR) oprócz swojej podstawowej funkcji, jaką jest rejestracja, pełni również nie mniej ważną funkcję serwera przetwarzającego dane. Odbiera sygnały z urządzeń zewnętrznych takich jak kamery, układy wejść/wyjść, impulsy prędkości, dane globalnego systemu nawigacji satelitarnej (GNSS) itp., przechowuje dane z nagrań wideo na lokalnym dysku twardym, komunikuje się z użytkownikami za pośrednictwem monitora i głośnika oraz łączy się z chmurą przez port LAN lub 3G/4G/5G. Rejestrator DVR jest zazwyczaj instalowany w pobliżu fotela kierowcy. Na rysunku 2 przedstawiono przykład rejestratora DVR zainstalowanego w kabinie autobusu.

Rys. 2. Przykład pokładowego systemu bezpieczeństwa w autobusie, pokazujący kamerę przy fotelu kierowcy, rejestrator DVR i monitory
Na rysunku 2 przedstawiono również kamerę zainstalowaną nad fotelem kierowcy w celu monitorowania jego zachowania. Jest też kamera zainstalowana przy przednich drzwiach kabiny obserwująca zarówno same drzwi, jak i przejście między siedzeniami autobusu. Obszary te są monitorowane celu obserwacji ruchu pasażerów i informowaniu kierowcy o momencie zamknięcia drzwi (rys. 3). Monitor/ekran jest zazwyczaj instalowany w pobliżu siedzenia kierowcy, skąd kierowca może go łatwo obserwować. Monitor ten jest elementem interaktywnego interfejsu z rejestratorem DVR i całym systemem bezpieczeństwa pojazdu, a także umożliwia oglądanie obrazu z kamer w różnych lokalizacjach w czasie rzeczywistym, ułatwiając kierowcy podejmowanie decyzji.

Rys. 3. Przykład systemu bezpieczeństwa pokładowego w autobusie, przedstawiający kamery obserwujące tylne drzwi
Kolejny przykład instalacji monitorującej, który umożliwia pasażerom obserwację zajętości miejsc siedzących na drugim pokładzie autobusu.

Rys. 4. Przykład systemu bezpieczeństwa pokładowego w autobusie, pokazującego pasażerom rozmieszczenie miejsc na drugim piętrze autobusu
System bezpieczeństwa pojazdu jest w zasadzie zamkniętym obwodem telewizyjnym (CCTV) w pojeździe. System ten zapewnia kierowcy wygodny widok umożliwiający obserwację wnętrza pojazdu i martwych punktów. Dostarcza również w czasie rzeczywistym dane dotyczące działania pojazdu oraz obrazy do zdalnego centrum sterowania i dyspozytorni pojazdów.
Tradycyjne rozwiązania rejestratora wideo, kamery i monitora
Typowe rozwiązanie sprzętowe DVR przedstawiono na rysunku 5. W głównym łańcuchu sygnałowym analogowy sygnał wideo z zewnętrznej kamery analogowej jest przesyłany do analogowo-cyfrowego przetwornika wideo (ADC, zwanego również dekoderem wideo), który konwertuje/dekoduje analogowy zespolony sygnał wideo (Composit Video Blanking and Sync – CVBS), analogowy sygnał wysokiej rozdzielczości (AHD) i interfejs transportu wideo (TVI)) na cyfrowy sygnał wideo BT656. Zazwyczaj maksymalna rozdzielczość, jaką można przesyłać sygnałem CVBS, wynosi 576i, natomiast standard TVI może przesyłać sygnał 8K12,5p. To samo dotyczy analogowych sygnałów audio, które są konwertowane na I2S. Zazwyczaj sam układ SoC (System On Chip) ma port wyjściowy wideo do wysyłania strumienia wideo z interfejsu użytkownika. Port ten jest zazwyczaj typu HDMI®, VGA lub CVBS.

Rys. 5. Typowy schemat blokowy rozwiązania sprzętowego systemu DVR
Na rysunku 6 przedstawiono udoskonalony system kamer analogowych, który w celu poprawy jakości obrazu wykorzystuje zaawansowane funkcje procesora wideo. Czujnik obrazu przechwytuje informacje świetlne i przekształca je na sygnały cyfrowe. Są one następnie przekazywane do procesora wideo za pośrednictwem interfejsów takich jak MIPI, UART/I2C i GPIO. Procesor ten odgrywa kluczową rolę, wykorzystując zaawansowane techniki, takie jak konwersja przestrzeni kolorów w celu zapewnienia zgodności z różnymi standardami wyświetlania, korekcja obrazu w celu dostosowania zniekształceń optycznych oraz kompensacja ekspozycji w celu optymalizacji czytelności obrazu w różnych warunkach oświetleniowych.

Rys. 6. Typowy schemat blokowy systemu z kamerą analogową
Po przetworzeniu dane wyjściowe są przekazywane do kodera TVI/AHD/CVBS. Aby zachować integralność sygnału, urządzenie to koduje przetworzone sygnały do standardowych formatów wideo odpowiednich do transmisji za pośrednictwem tradycyjnych infrastruktur wideo, wykorzystując złącze SMA 75 Ω.
Dodatkowo, system zawiera układ zasilający, dołączony za pośrednictwem złącza zasilania. Cała instalacja ma tym samym zapewnione niezawodne zasilanie elektryczne. W celu dalszego ulepszenia sterowania i komunikacji zintegrowano złącze RS-232/TTL (transistor-to-transistor logic) o niskiej prędkości, które ułatwia dodatkowe opcje łączności.
Na rysunku 7 przedstawiono architekturę starannie zaprojektowanego systemu kamer IP, którego zadaniem jest przekształcania surowych danych sensorycznych w obrazy cyfrowe, gotowe do przetwarzania i analizy przez sterownik kamery. Dane uzyskiwane z systemu kamer, począwszy od czujnika, który przechwytuje informacje wizyjne z otoczenia, są przesyłane skomplikowaną, ale starannie zoptymalizowaną drogą.

Rys. 7. Typowy schemat blokowy kamery IP
Pierwszy etap przetwarzania odbywa się w MIPI PHY, gdzie ma miejsce wstępna konwersja cyfrowa danych wyjściowych z czujnika. Interfejs ten dekoduje pakiety obrazu MIPI do poziomu pikseli w celu analizy i dostosowania przez sterownik kamery.
Stamtąd dane trafiają do sterownika kamery, który jest kluczowym elementem koordynującym przepływ danych i przygotowującym je do dalszego przetwarzania. Do niego dołączony jest interfejs Ethernet PHY z kontrolą dostępu do mediów (MAC), który zarządza komunikacją sieciową. Odpowiada on za formatowanie, adresowanie i wysyłanie pakietów danych przez sieci, umożliwiając kamerze płynną współpracę z systemami sieciowymi.
Wreszcie kolejny etap Ethernet PHY przygotowuje dane do ostatecznego przetworzenia przez układ SoC, który integruje wszystkie przychodzące informacje, wykonuje złożone obliczenia i podejmuje decyzje na podstawie zintegrowanych danych wideo. Tak zaawansowany przepływ danych zapewnia, że system kamer IP nie tylko rejestruje obrazy, ale robi to w sposób umożliwiający ich natychmiastowe wykorzystanie w zastosowaniach związanych z bezpieczeństwem, monitorowaniem i analizą, podkreślając zdolność systemu do wydajnego i skutecznego przetwarzania danych w środowiskach czasu rzeczywistego.
Połączenia kamer analogowych oparte są na kablach koncentrycznych 75 Ω przesyłających analogowe sygnały wideo. Wymagane są ponadto niezależne kable zasilające do przesyłania zasilania i dodatkowych sygnałów sterujących RS-232 lub RS-485 (rys. 8).

Rys. 8. Kabel koncentryczny do kamery analogowej
W kamerach IP używane są standardowe kable ethernetowe, takie jak CAT3 lub CAT5. Jeśli nie jest obsługiwana technologia Power over Ethernet (PoE), potrzebny jest dodatkowy kabel zasilający. Kabel Ethernet składa się z czterech skręconych par (rys. 9). Skręcenie zmniejsza zakłócenia sygnału.

Rys. 9. Kabel Ethernet do kamery IP
Na rysunku 10 przedstawiono schemat blokowy systemu monitorowania ilustrujący zaawansowaną strukturę zaprojektowaną w celu efektywnego zarządzania i wyświetlania sygnałów wideo. Centralnym elementem tego schematu blokowego jest sterownik, który koordynuje różne wejścia i wyjścia w celu zapewnienia płynnego działania.

Rys. 10. Typowy schemat blokowy systemu monitorującego
Począwszy od lewej strony, AVI łączy się z systemem przez złącze 75 Ω. Analogowy sygnał wideo jest następnie przekazywany do dekodera TVI/AHD/CVBS, który jest przystosowany do konwersji różnych formatów wideo na standardowe wyjście cyfrowe, ułatwiając dalsze przetwarzanie.
Sterownik dołączony za pośrednictwem interfejsów I2C, obsługuje te dane cyfrowe i stanowi punkt połączenia kilku kluczowych ścieżek. Komunikuje się bezpośrednio z wyświetlaczem LCD i jego układami obsługującymi panel dotykowy. Sterownik może zmieniać parametry obrazu, takie jak jasność, poprzez modulację szerokości impulsu (PWM) i przetwarza sygnały wejściowe z panelu dotykowego, poprawiając interakcję użytkownika z wyświetlaczem.
Dodatkowe interfejsy komunikacyjne to RS-422/TTL i GPIO, umożliwiające odpowiednio wydajną transmisję danych na duże odległości oraz ogólne operacje wejścia/wyjścia. Funkcje te mają kluczowe znaczenie dla zadań interaktywnych, takich jak sterowanie ustawieniami wyświetlacza lub integracja dodatkowych funkcji.
Należy pamiętać, że oprócz kabli do transmisji sygnałów punkt-punkt i analogowych sygnałów wideo, do podłączenia monitora wymagane są również kable do transmisji sygnałów RS-422 (rys. 11).

Rys. 11. Rozmieszczenie sygnałów na złączu RS-422
Tradycyjne rozwiązanie sprzętowe CCTV wymaga wielu kabli, w tym kodeka wideo, kabla koncentrycznego lub kabla Ethernet, kabla zasilającego oraz kabla sygnału sterującego (RS-422/RS-485/RS-232). Może to sprawić, że instalacja będzie skomplikowana i kosztowna.
Funkcje GMSL mogą być stosowane w pokładowych systemach bezpieczeństwa
Liczba kamer i wyświetlaczy stale rośnie, poprawia się również jakość obrazu. To wszystko przekłada się na wymóg stosowania systemów przesyłania obrazu wideo o większej przepustowości. Gigabit Multimedia Serial Link (GMSL) firmy Analog Devices wspiera te trendy i upraszcza architekturę systemu. GMSL łączy i przesyła obraz wideo z kamer do komputerów, między komputerami oraz z komputerów do wyświetlaczy. Innowacje w GMSL są kontynuowane w kolejnej generacji, umożliwiając dalszy rozwój zaawansowanych funkcji i możliwości dla komputerów o wyższej wydajności i aplikacji definiowanych programowo.
Dzięki zapewnieniu kompatybilności wstecznej nowej generacji GMSL z generacją poprzednią, przejście z jednej generacji do następnej jest łatwe.
GMSL przesyła każdy sygnał (MIPI-CSI, I2C, GPIO itp.) wymagany przez czujnik zaawansowanego systemu wspomagania kierowcy (ADAS) za pomocą jednego kabla koncentrycznego lub STP, a kamery dołączone do GMSL zazwyczaj wymagają tylko jednego złącza do przesyłania obrazu, zasilania, sterowania, synchronizacji, haptyki, dotyku, aktualizacji oprogramowania, raportowania stanu i innych funkcji, jak pokazano na rysunku 12. Skutkuje to znacznym zmniejszeniem masy, zużycia energii, kosztów A/V i złożoności.

Rys. 12. Typowy blok sprzętowy GMS
Nasze rozwiązania są liderami wydajności na rynku SERDES, osiągając w produkcji masowej prędkość transmisji danych dochodzącą dziś do 12 Gb/s. Dzięki ponad 100 zoptymalizowanym elementom, GMSL gwarantuje sukces w systemach o niewielkich rozmiarach i niskim zapotrzebowaniu na energię.
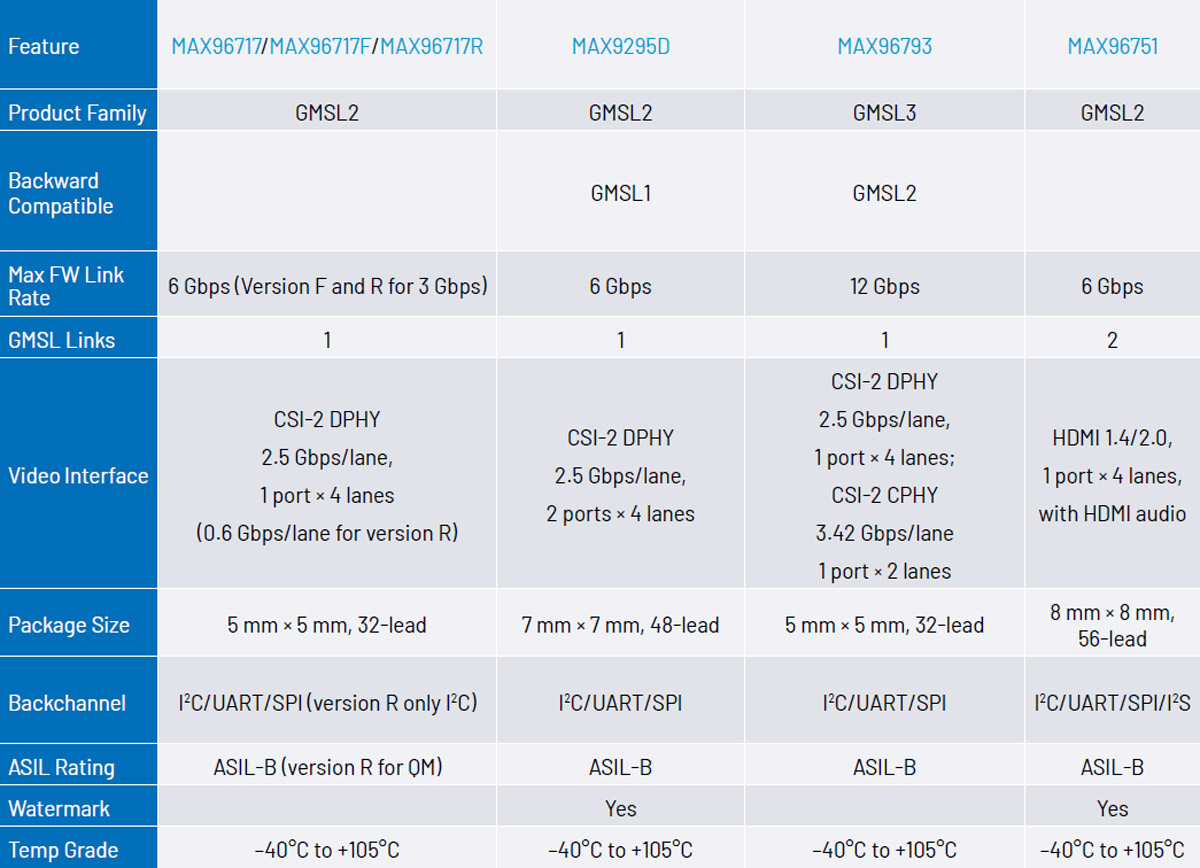
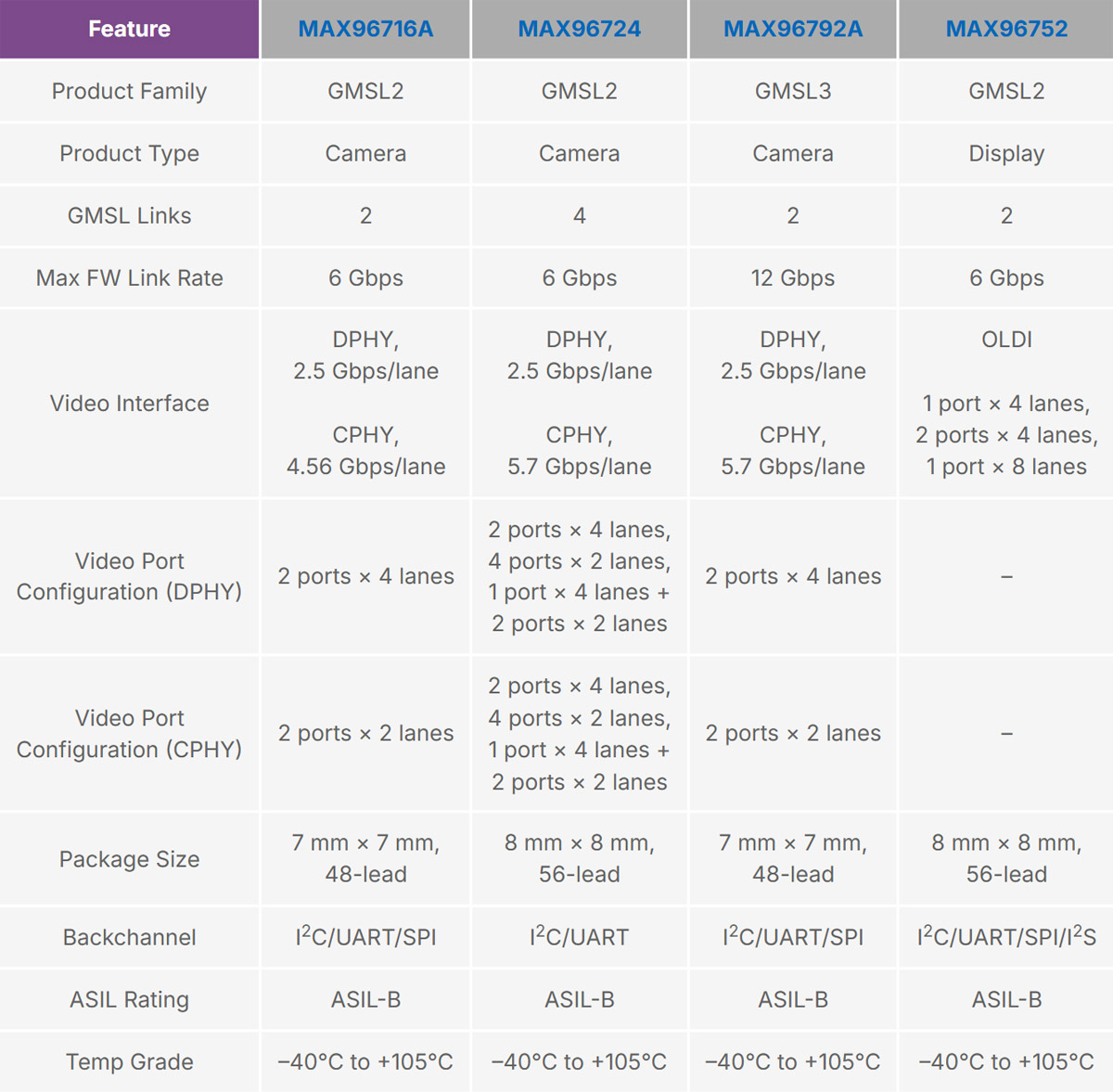
ADI rozszerzyło szeroką ofertę rynkową na GMSL dla aplikacji z kamerami i wyświetlaczami. Podstawowe parametry i cechy naszych najnowszych serializatorów GMSL2/GMSL3 zostały zestawione w tabeli 1, natomiast tabela 2 zawiera główne parametry i cechy deserializatora GMSL2/GMSL3. Obsługiwane interfejsy wideo to: LVDS, HDMI i MIPI CSI-2. MAX9295D można łączyć z urządzeniami oznaczonymi w tabeli 1 jako kompatybilne wstecznie z GMSL1.
Tab. 1. Parametry serializatorów
Tab. 2. Parametry deserializatorów
Korzyści i możliwości wynikające z zastosowania GMSL
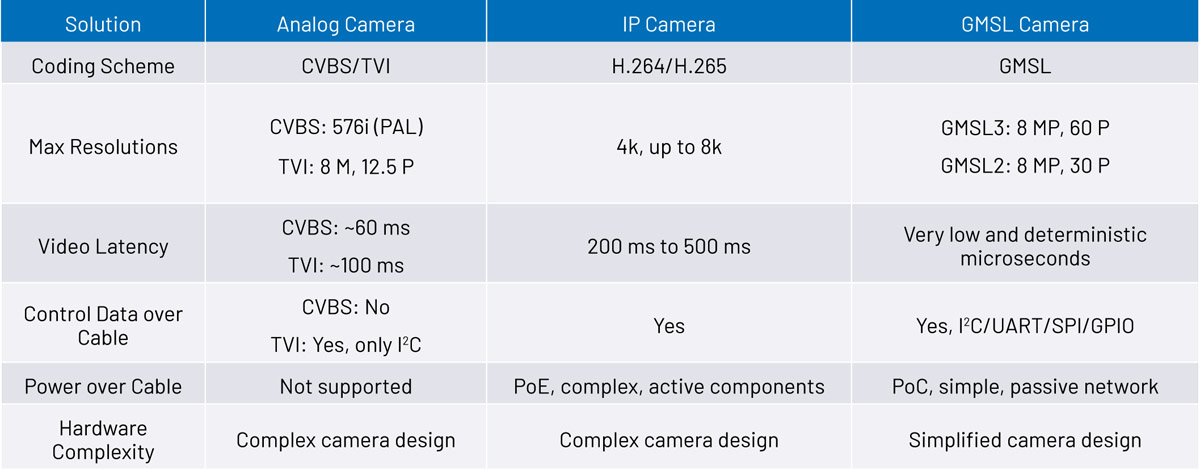
Maksymalna prędkość łącza uplink (forward link) podana w tabeli 1 i tabeli 2 odnosi się do szybkości transmisji bitów kodowanych przez protokół GMSL w łączu szeregowym. Jednocześnie przesyłane są również sygnały sterujące, takie jak I2C/UART/GPIO. Parametry wydajnościowe niektórych popularnych rozwiązań kamer monitorujących, konkurencyjnych w stosunku do rozwiązań GMSL dostępnych na rynku, porównano w tabeli 3.
Tab. 3. Porównanie trzech rozwiązań kamerowych
Schemat blokowy systemu kamerowego GMSL przedstawiono na rysunku 13.

Rys. 13. Typowy system kamerowy GMSL
W porównaniu z rysunkiem 6 i rysunkiem 7 rozwiązanie GMSL SERDES znacznie zmniejsza liczbę komponentów wymaganych dla modułu kamery. GMSL SERDES może jednocześnie przesyłać dane I2C/UART/SPI/GPIO w dwóch kierunkach, co pozwala układowi SoC uzyskać dostęp do innych urządzeń peryferyjnych zdalnego czujnika obrazu poprzez GMSL, takich jak inercyjne jednostki pomiarowe (IMU), czujniki G, sterowniki LED i inne sygnały sterujące obrotem/pochyleniem/zoomem (PTZ). GPIO wnoszą opóźnienie rzędu mikrosekund, a to pozwala użytkownikom wyzwalać pojedynczą klatkę. Zewnętrzny interfejs kamery GMSL wymaga jedynie kabla koncentrycznego 50 Ω lub pary ekranowanych skrętek.
Seria MAX96717/MAX96793 obsługuje zegar referencyjny w kanale zwrotnym (RoR). Zegar ten jest przesyłany z deserializatora w kanale zwrotnym, co pozwala na pominięcie generatora kwarcowego na płytce czujnika (rys. 14). Uzyskuje się w ten sposób kilka korzyści: zmniejszenie kosztów systemu, zwiększenie niezawodności, zmniejszenie kwarcu i uproszczenie płytki.

Rys. 14. Schemat łańcucha sygnałowego RoR
Jak widać na rysunkach 13 i 15, interfejs wideo GMSL SERDES i interfejs sterowania są bezpośrednio dołączone do czujnika obrazu i panelu LCD, co eliminuje potrzebę stosowania mikrokontrolera, kodeka wideo, sterowników i odbiorników RS-485/RS-232 oraz innych złączy. Rozwiązanie GMSL SERDES zapewnia również większą przepustowość wideo, ultraniskie i deterministyczne opóźnienia wideo, niezwykle prostą konstrukcję sprzętu oraz zewnętrzny interfejs wymagający tylko jednego niedrogiego kabla koncentrycznym lub STP.

Rys. 15. Typowy system sprzętowy wyświetlacza GMSL
Wnioski
Rozwiązanie GMSL SERDES stanowi potężną alternatywę dla istniejących aplikacji DVR montowanych w pojazdach, zmniejszając koszty materiałów i kabli pokładowych, jednocześnie zapewniając większą przepustowość i mniejsze opóźnienia wideo.
Przypisy
1 “Understanding Analog Video Signals.„ Analog Devices, Inc., September 2002.
2 Ferenc Barany. “AN-945: System Bandwidth vs. Resolution for Analog Video.„ Analog Devices, Inc., November 2007.
3 Kainan Wang. “Gigabit Multimedia Serial Link (GMSL) Cameras as an Alternative to GigE Vision Cameras.„ Analog Dialogue, Vol. 57, December 2023.
Autor oryginału: Yaxian Li – inżynier ds. aplikacji w Centrum Aplikacji EMEA w firmie Analog Devices. Do Maxim Integrated (obecnie część ADI) dołączył w 2020 r. po ukończeniu studiów na Uniwersytecie Hangzhou Dianzi, gdzie w 2018 r. uzyskał tytuł licencjata w dziedzinie elektrotechniki i automatyki. Specjalizuje się w technikach GMSL i RF.
Opracowanie: Jarosław Doliński
 [RAQ] Zasięg i wydajność łącza kabla Ethernet 10BASE-T1L z pojedynczą parą
[RAQ] Zasięg i wydajność łącza kabla Ethernet 10BASE-T1L z pojedynczą parą  [RAQ] Przetwornica podwyższająca napięcie (boost) łączy technologię Silent Switcher i odłączanie wejścia w celu zapewnienia wydajności oraz ochrony
[RAQ] Przetwornica podwyższająca napięcie (boost) łączy technologię Silent Switcher i odłączanie wejścia w celu zapewnienia wydajności oraz ochrony  [RAQ] Jak zmierzyć i określić czas miękkiego startu, gdy nie jest on opisany równaniem? [cz. 2]
[RAQ] Jak zmierzyć i określić czas miękkiego startu, gdy nie jest on opisany równaniem? [cz. 2] 






