





DigiKey rozmawia z onsemi o technicznych kwestiach dotyczących robotyki i sztucznej inteligencji
Firma DigiKey postanowiła przyjrzeć się bliżej punktom styku robotyki i systemów sztucznej inteligencji, czyli jak autonomiczne roboty mobilne (AMR) zmieniają środowiska przemysłowe i komercyjne. Omówiła to w zaprezentowanej poniżej sesji pytań i odpowiedzi. Pytania zadawał Shawn Luke’a, inżynier ds. marketingu technicznego w DigiKey. Odpowiadali mu Bob Card, kierownik ds. marketingu w onsemi oraz Theo Kersjes, lider ds. rozwoju biznesu przemysłowego i rozwiązań w onsemi.
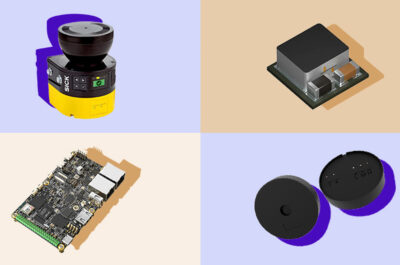
Roboty AMR używają szereg czujników, takich jak LiDAR, kamery i detektory ultradźwiękowe w celu zwiększenia bezpieczeństwa, poprawienia wydajności i skutecznego działania w złożonych przestrzeniach. Rozmowa nawiązuje do branży samochodów autonomicznych, gdzie roboty AMR wykorzystują lokalizację i mapowanie (SLAM) w dynamicznie zmieniających się środowiskach, również zewnętrznych. Jest to możliwe dzięki postępom w integracji czujników, przetwarzaniu brzegowym i sztucznej inteligencji. Wraz z rozwojem tych technologii roboty AMR staną się jeszcze bardziej autonomiczne, adaptacyjne i niezbędne w sektorach od logistyki i produkcji po rolnictwo i kontrolę infrastruktury.
Co należy wziąć pod uwagę przy projektowaniu inteligentniejszych robotów?
Bob Card: – Roboty przemysłowe istnieją już od dziesięcioleci, więc są ekspertami w tym, co robią, ale mogą również stanowić zagrożenie dla ludzi pracujących obok nich w magazynach, fabrykach i podobnych miejscach. Nie są zaprojektowane do swobodnego poruszania się w swoim otoczeniu, zwłaszcza jeśli jest ono dynamiczne. Inteligentniejsze roboty mają za zadanie zapewnić harmonię fizyczną między ludźmi pracującymi obok robotów.
Theo Kersjes: – Różnorodne czujniki, w tym ultradźwiękowe, obrazowe, LiDAR, radarowe i inne, pozwalają algorytmowi robota przetwarzać i nawigować w swoim otoczeniu, stawiając bezpieczeństwo ludzi na pierwszym miejscu. Roboty mogą pomagać w podnoszeniu samochodów lub dużego sprzętu, oraz wykonywać zadania, które stanowią zagrożenie lub są powtarzalne. Inteligentniejsze roboty mogą wykonywać szerszy zakres prac, dzięki połączeniu sztucznej inteligencji i robotyki.
W jaki sposób AMR są podobne do robotyki samochodowej?
Card: AMR i samochody autonomiczne są najbardziej podobne pod względem wewnętrznych systemów komunikacyjnych. Tradycyjnie roboty wykorzystują CAN (Controller Area Network), dwuprzewodowy protokół komunikacyjny typu multi-drop. Jednak firma onsemi ma technologię 10BASE-T1S, która jest protokołem typu multi-drop opartym na sieci Ethernet i wykorzystującym dwuprzewodową nieekranowaną skrętkę.
Główne zalety 10BASE-T1S w odniesieniu do CAN:
- Wyższe prędkości transmisji danych: 10BASE-T1S działa z prędkością 10 Mb/s, w porównaniu do 2 Mb/s w przypadku standardowego CAN i 5 Mb/s oraz CAN-FD w idealnych warunkach.
- Mniejsza złożoność okablowania i waga, co jest ważne w przypadku kompaktowych, mobilnych systemów, takich jak AMR.
- Brak konieczności stosowania bram: eliminuje potrzebę łączenia sieci CAN i Ethernet.

Ta innowacja wpisuje się w szerszy trend w motoryzacji i robotyce, zmierzający w kierunku architektur strefowych i konwergencji technologii komunikacyjnych, gdzie oczekuje się, że 10BASE-T1S zastąpi CAN w obu dziedzinach.
onsemi oferuje dwa kontrolery 10BASE-T1S, NCN26010 (MAC i PHY) oraz NCN26000 (tylko PHY), które są w pełni zgodne ze specyfikacjami IEEE802.3cg, a także obsługują funkcję ENI (Enhanced Nose Immunity). ENI rozszerza długość kabla SPE (Single Pair Ethernet) o 40 węzłów i 25 metrów dla pojedynczego segmentu 10BASE-T1S do 50 metrów, 16 węzłów lub 60 metrów, 6 węzłów.
Jak widać, zaawansowane technologie obliczeniowe — niegdyś dostępne wyłącznie w centrach danych — są obecnie wykorzystywane w urządzeniach brzegowych w robotyce, opartych na platformach takich jak NVIDIA Jetson i innych procesorach wbudowanych. To taki moment w branży, w którym rozwiązania z zakresu robotyki i motoryzacji w znacznym stopniu się zazębiają.
Co dalej z AMR?
Kersjes: – Czujniki zyskały lepszy zakres dynamiczny, co pozwala robotom działać skuteczniej w niekontrolowanych warunkach, takich jak środowisko rolnicze, roboty dostawcze na zewnątrz i tym podobne. Czujniki siły, położenia obrotowego i wilgotności mogą uwzględniać większą zmienność warunków środowiskowych i wykonywać bardziej precyzyjne zadania, na przykład takie, jak zbieranie jagód.
Indukcyjny czujnik położenia (IPS) NCS32100 jest bezkontaktowym czujnikiem absolutnym położenia obrotowego o dokładności ±50 sekund kątowych lub lepszej do 6000 RPM (obrotów na minutę), z maksymalną prędkością 45000 RPM (przy zmniejszonej dokładności). Firma onsemi oferuje bezpłatne narzędzie do projektowania płytek drukowanych online, umożliwiające szybkie projektowanie płytek drukowanych wirnika i stojana. Ułatwia to produkcję ekonomicznego i dokładnego rozwiązania enkoderowego do zastosowań w robotyce.
Card: – Roboty mają również ogromny potencjał w zakresie odciążania ludzi od niebezpiecznych, monotonnych lub niepożądanych zadań, którymi ludzie nie są zainteresowani. Dotyczy to zarówno przestrzeni przemysłowej, jak i życia osobistego i takich czynności jak czyszczenie rynien lub malowanie domów.
Kersjes: – Autonomiczne wózki widłowe stały się koniecznością z punktu widzenia bezpieczeństwa w środowisku przemysłowym. Dane OSHA pokazują, że tylko w Stanach Zjednoczonych każdego roku dochodzi do około 35 tysięcy wypadków z udziałem operatorów wózków widłowych, a ponadto rotacja na tym stanowisku wynosi 40%, więc wykorzystanie robotów do tych zadań może zwiększyć ogólne bezpieczeństwo w magazynie.
Czy moglibyście opowiedzieć więcej o technologii SLAM (Simultaneous Localization and Mapping) i jej działaniu?
Card: – Technologia SLAM polega na użyciu wirtualnego modelu magazynu, aby robot mógł poznać swoje otoczenie. Robot uczy się poruszania po otoczeniu metodą prób i błędów, zanim fizycznie się w nim znajdzie. Kiedy robot zostaje uruchomiony, jest już dobrze wyszkolony i będzie na bieżąco aktualizował mapę otoczenia. Potrafi nawet poruszać się wokół obiektów dynamicznych, takich jak inne roboty znajdujące się w otoczeniu.

Kersjes: – W branży motoryzacyjnej ta koncepcja jest znana jako „pierwszy pojazd”. AMR, który po raz pierwszy napotyka drogę lub nową przeszkodę, musi nauczyć się poruszać w nowym otoczeniu, a następnie przesłać swoje doświadczenia do sieci, aby inne pojazdy AMR też mogły się z nich uczyć i aktualizować mapy.
System operacyjny w robotach mobilnych pozwala nam zintegrować czujniki za pomocą technologii o nazwie HoloScan, która umożliwia szybką komunikację między czujnikami o wysokiej rozdzielczości lub szerokim paśmie, takimi jak czujniki obrazu. Jest to potrzebne do skopiowania tego, co widzi robot, bezpośrednio do jego pamięci w celu przetworzenia. Może to mieć kluczowe znaczenie dla innych zastosowań, takich jak telemedycyna, gdzie robot operuje kogoś, ale jest zdalnie sterowany przez lekarza. W takim przypadku zarówno opóźnienie, jak i przepustowość sieci mają kluczowe znaczenie.

Nowoczesne roboty mogą wykorzystywać dwa różne podejścia do sterowania i podejmowania decyzji. Są one określane jako „System 1” oraz „System 2” i odpowiadają różnym poziomom lub podejściom do sterowania i poznawania. Jest to analogiczne do ludzkich systemów poznawczych. System 1 w robotyce charakteryzuje się szybkimi, reaktywnymi i często zaprogramowanymi zachowaniami, podobnymi do instynktownych reakcji ludzi. System 2 natomiast obejmuje bardziej przemyślane, analityczne i potencjalnie wolniejsze procesy decyzyjne, wymagające bardziej złożonych obliczeń i rozumowania. Wykorzystuje on również sztuczną inteligencję i rozumowanie symboliczne do wykonywania bardziej złożonych i zaawansowanych zadań. Oba typy są potrzebne, aby roboty mogły bezpiecznie i samodzielnie funkcjonować w otoczeniu ludzi.
Jakie rodzaje technologii robotycznej są dla Ciebie najbardziej interesujące?
Kersjes: – Technologie, które obserwujemy w różnych płytach ewaluacyjnych i produktach klientów, to kamery obrazowe. W przypadku AMR ważne jest umiejscowienie czujników. Na przykład, jeśli widok jest zasłonięty (np. przez przenoszone przedmioty), często stosuje się klastry czujników w rogach, aby uzyskać pole widzenia 360°.
Ważne dla zarządzania zasilaniem i umożliwienia robotom wykonywania funkcji wyższego poziomu, takich jak inteligentne zachowanie podczas awarii zasilania lub problemów z nawigacją są technologie, takie jak e-fuse (bezpieczniki elektroniczne) i funkcje łagodnego resetowania.
Card: – Zarządzanie zasilaniem ma szczególne znaczenie w robotach mobilnych, które pobierają moc z akumulatorów, a nie ze stabilnego źródła prądu przemiennego. Ponieważ napięcie akumulatora może się znacznie różnić (np. 30 V…42 V dla zestawu 10 ogniw), konieczne są wydajne przetworniki DC-DC (takie jak rodzina FAN65000). Przetworniki te, o sprawności ponad 95%, pomagają utrzymać wiele szyn prądu stałego dla podsystemów i mają bezpośredni wpływ na żywotność i wydajność akumulatora, zapewniając dłuższy czas pracy.
Kersjes: – W onsemi dążymy do wykazania zalet produktów — takich jak wydłużenie żywotności baterii dzięki naszemu najnowszemu wydajnemu tranzystorowi MOSFET Trench 10 — w środowiskach cyfrowych, takich jak NVIDIA Omniverse Isaac Sim. Chodzi o symulowanie zachowań robotów (np. jazdy po określonych trasach) i powiązanie wyników wydajności (takich jak dłuższa żywotność baterii) z podstawowymi zaletami sprzętu.
Jest też zainteresowanie wykazaniem rzeczywistych korzyści wynikających ze stosowania komponentów na poziomie systemu (poza testami laboratoryjnymi, takimi jak testy impulsowe lub termiczne) poprzez zintegrowanie ich z funkcjonalnymi symulacjami i ewaluacjami robotyki.
Zespół współpracuje ponadto z wieloma partnerami kanału dystrybucji, którzy dysponują różnymi platformami mikrokontrolerów. Aby wesprzeć te działania, system robotyczny został zaprojektowany przy użyciu kontenerów Docker, co pozwala systemowi operacyjnemu robota (ROS) działać w sposób przenośny i elastyczny na różnych platformach sprzętowych. Platformy te obejmują NVIDIA Jetson, D3 Embedded, Advantech, Renesas i AMD.
Takie podejście umożliwia łatwą adaptację oprogramowania robotycznego w różnych ekosystemach partnerów.
Jaka jest przyszłość robotyki?
Card: – 2025 postrzegamy jako „rok dowodu, że robot potrafi to zrobić”, z wieloma nowymi poziomami innowacji, które stają się coraz bardziej dojrzałe w tej dziedzinie. Od takich rozwiązań, jak kamery iToF (indirect-time-of-flight), mierzące odległości do obiektów poprzez analizę odbicia modulowanych fal świetlnych od powierzchni i powrotu do czujnika, po fizyczną sztuczną inteligencję, która pomaga przyspieszyć proces uczenia się i szkolenia robotów. Wszystkie technologie czujników, które są potrzebne w różnych zastosowaniach, pomagają systemom robotycznym zachować bezpieczeństwo i skuteczność, co prowadzi do wzrostu wykorzystania robotów i ich liczby w nadchodzących latach.
Źródło: DigiKey
 DigiKey dodał ponad 100 tysięcy nowych produktów i ponad 100 nowych dostawców w Q1 2025
DigiKey dodał ponad 100 tysięcy nowych produktów i ponad 100 nowych dostawców w Q1 2025  onsemi wprowadza na rynek zaawansowany sensor obrazu z pomiarem odległości techniką iToF do zastosowań przemysłowych
onsemi wprowadza na rynek zaawansowany sensor obrazu z pomiarem odległości techniką iToF do zastosowań przemysłowych  DigiKey i SparkFun nawiązują współpracę w zakresie dostarczania zestawów robotycznych XRP
DigiKey i SparkFun nawiązują współpracę w zakresie dostarczania zestawów robotycznych XRP 

![O konkursie organizowanym przez firmę TRUMPF Huettinger i polskie uczelnie techniczne opowiada Alicja Peresada i prof. Jacek Rąbkowski oraz kilkoro nagrodzonych dyplomantów: mgr inż. Jakub Dobosz, inż. Maja Zielińska, dr inż. Jakub Kołodziej, dr inż Weronika Hryniewska-Guzik i dr inż. Grzegorz Bartyzel. Zapraszamy do obejrzenia filmu! [materiał redakcyjny]](https://mikrokontroler.pl/wp-content/uploads/2026/07/TRUMPF-czolowka.png "https://www.youtube.com/watch?v=XkeyLmtLfxo")



