ISIX-RTOS – przykład 4 – wątkowa obsługa portu szeregowego RS232
| Opis systemu ISIX-RTOS i jego funkcji opublikowaliśmy w artykule „Mini system operacyjny dla STM32 – wprowadzenie”, który można przeczytać tu. |
W przykładzie czwartym pokażemy, w jaki sposób napisać uniwersalną klasę/sterownik obsługi portu szeregowego. Obsługa portu szeregowego przyda się z pewnością w większości aplikacji, chociażby do tworzenia komunikatów diagnostycznych na etapie uruchamiania projektu. Sterownik dla portu szeregowego napiszemy z wykorzystaniem systemu przerwań. W przypadku urządzeń znakowych najbardziej odpowiednim będzie użycie kolejek FIFO, jednej nadawczej oraz drugiej odbiorczej. Ponieważ w kontekście przerwań nie możemy wywoływać funkcji blokujących, należy użyć specjalnych metod z przyrostkiem _isr (push_isr(), pop_isr() klasy fifo.
Aby pokazać możliwości pracy wielowątkowej w przykładzie stworzymy dwa wątki:
- odbiorczy, służący do odbioru danych z portu szeregowego, który w zależności od odebranego znaku będzie sterował pracą diod LED: D1 i D2 zamontowanych na płytce STM32Butterfly,
- nadawczy, którego działanie sprowadzać się będzie do odczytu stanu joysticka oraz transmisję poprze UART informacji tekstowej o jego aktualnej pozycji.
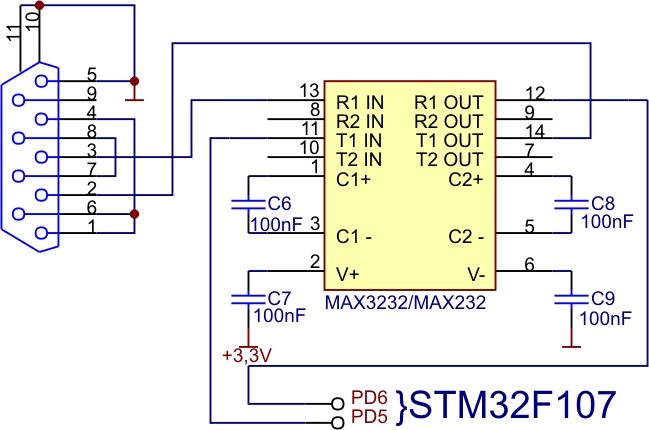
Rys. 1. Schemat elektryczny konwertera napięciowego RS232 i sposób jego dołączenia do płytki STM32Butterfly
Po podłączeniu zestawu STM32Butterfly do interfejsu RS232 komputera w celu przetestowania działania aplikacji należy uruchomić ulubiony program terminalowy (np. Minicom, Hyperterminal itp.) oraz skonfigurować wybrany port szeregowy z następującymi parametrami transmisji: prędkość – 115200 b/s, liczba bitów danych: 8, 1 bit stopu, brak kontroli parzystości i kontroli przepływu. Po zaprogramowaniu mikrokontrolera w oknie terminala powinien pojawić się komunikat informujący o uruchomieniu programu. Po wciśnięciu na klawiaturze PC klawisza A mamy możliwość włączenia diody LED D1 i jej wyłączenia za pomocą klawisza B. W podobny sposób możemy sterować pracą diody LED D2 – służą do tego celu klawisze C i D. Przechylenie osi joysticka powoduje wyświetlona informacji tekstowej o jej położeniu. Sposób działania aplikacji z podziałem na wątki przedstawiono na rys. 2.
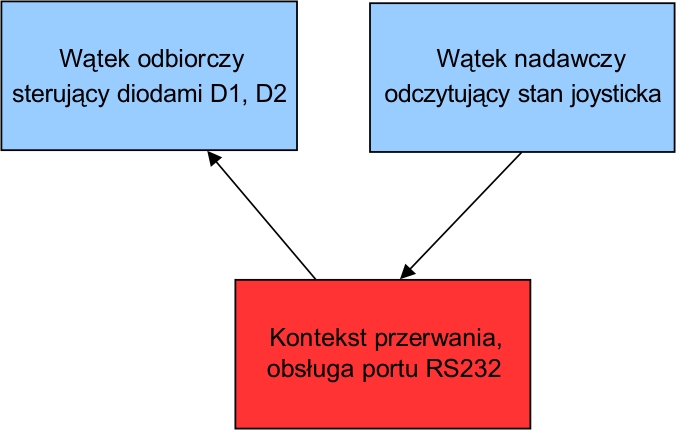
Rys. 2. Sposób działania przykładowej aplikacji z podziałem na wątki
 PM-3133-CPS – inteligentny trójfazowy licznik energii z CANopen
PM-3133-CPS – inteligentny trójfazowy licznik energii z CANopen  Czujnik drgań STMicroelectronics z wbudowaną AI alternatywą dla czujników piezoelektrycznych do monitorowania urządzeń przemysłowych
Czujnik drgań STMicroelectronics z wbudowaną AI alternatywą dla czujników piezoelektrycznych do monitorowania urządzeń przemysłowych  Słabe ogniwa elektroniki: Dlaczego jakość wiązek kablowych i płytek PCB decyduje o Twoim zysku?
Słabe ogniwa elektroniki: Dlaczego jakość wiązek kablowych i płytek PCB decyduje o Twoim zysku? 


![Szymon Robak oprowadza po katowickim Laboratorium Badań Kompatybilności Elektromagnetycznej w Sieć Badawcza Łukasiewicz - Instytucie Sztucznej Inteligencji i Cyberbezpieczeństwa. Zapraszamy na film! [materiał redakcyjny]](https://mikrokontroler.pl/wp-content/uploads/2026/06/Szymon-Robak-tytulowe.png "https://www.youtube.com/watch?v=gHcP8AajoN4")
![Zapraszamy do obejrzenia filmu i wysłuchania krótkich wypowiedzi prelegentów Hardware Forum 2026 i organizatorów majowej konferencji dla inżynierów z branży elektronicznej: Konrad Bruliński z Lemontech, prof. Krzysztof Kulpa z Politechniki Warszawskiej, Zbigniew Huber z FLC, Ewa Załupska z firmy KROK, Jerzy Kozieł z MPTECH, Grzegorz Potyralski z VIGO Photonics, dr Krzysztof Czuba z Politechniki Warszawskiej, Anna Beata Kalisz Hedegaard z Quantum Security Defence, Adrian Cichosz z Elhurt Dystrybucja Anna Kamińska z Creotech Quantum, oraz Łukasz Jaeszke i Adam Jaeszke z TEK.day [materiał redakcyjny]](https://mikrokontroler.pl/wp-content/uploads/2026/05/tytulowe-film-1.png "https://www.youtube.com/watch?v=BgxJVTwYJ-s")