W kolejnym przykładzie płytka micro:bit będzie sterować pracą niewielkiego serwomechanizmu:

Rys. 9. Serwomechanizm SG-90

Podłączamy zasilanie do serwomechanizmu (3 V – przewód czerwony, GND – przewód brązowy). W przypadku większych serwomechanizmów należy podłączyć zewnętrzne zasilanie (np z baterii lub zasilacza), ponieważ stabilizator micro:bit ma niewielką wydajność oraz oferuje jedynie napięcie 3 V, a serwomechanizmy wymagają zazwyczaj napięcia z zakresu 4,8…6 V. Przewód pomarańczowy (wejście sygnału sterującego) podłączamy do wyjścia AIN0 (pin PB0). Podłączone serwo do płytki micro:bit wygląda następująco:
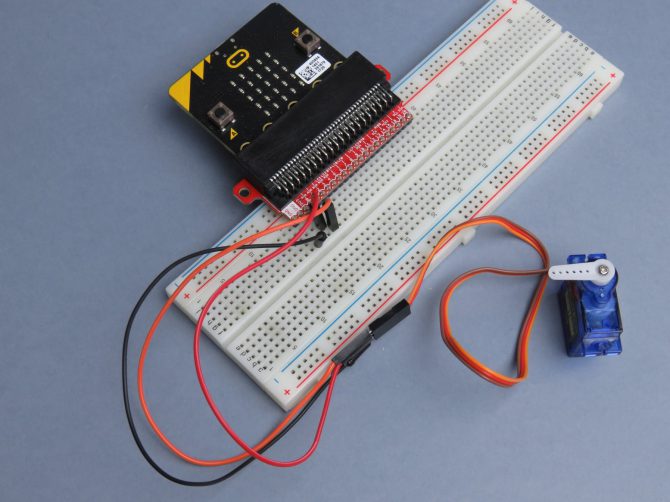
Rys. 10. Serwomechanizm podłączony do płytki micro:bit
Napiszemy prosty program, w którym naciśnięcie przycisku A spowoduje obrót obojczyka serwa w skrajną lewą pozycje, natomiast naciśnie przycisku B spowoduje obrót skrajną prawą pozycję. Dodatkowo na ekranie pojawiać się będą strzałki informujące w którą stronę obrócony jest obecnie obojczyk serwa (pełen kod programu dostępny jest na stronie oraz w sekcji do pobrania).
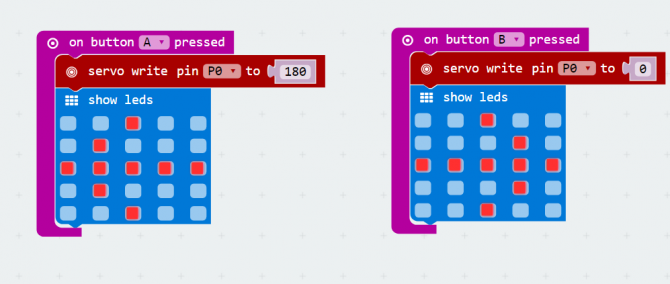
Będziemy potrzebowali bloczku do obsługi przycisku czyli on button A pressed. Następnie wykorzystany zostanie element do sterowania serwem, który nazywa się on serwo write pin P0 to 180. Znajduje się on w kategorii Pins (aby ją otworzyć musimy rozwinąć listę Advanced). Bloczek on serwo write pin P0 to 180 ma dwa parametry: pin, do którego jest podłączone serwo (w naszym przypadku pin PB0 – AIN0 na adapterze) oraz kąt obrotu serwa (domyślnie 180°). Aby wyświetlić strzałkę, należy wykorzystać element show leds. Program powodujący obrót serwa w lewą skrajną pozycje po przyciśnięciu przycisku A wygląda następująco:
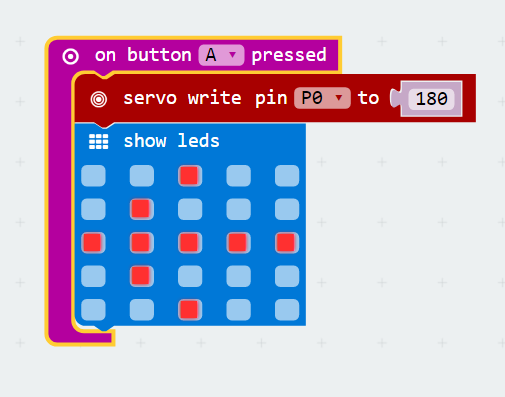
Rys. 11. Część programu do obsługi serwa dla przycisku A
Dla przycisku B program wygląda analogicznie – zmieniamy tylko wartość z 180 na wartość 0. Zmianie ulega również kierunek strzałki w bloczku show leds. Program dla przycisku B wygląda następująco:
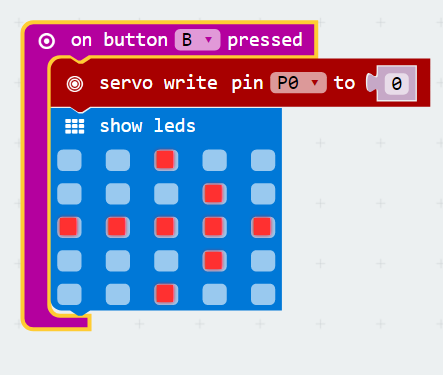
Rys. 12. Część programu do obsługi serwa dla przycisku B
Całość programu wygląda następująco:
Rys. 13. Program 2 – obsługa serwomechanizmu