





Freescale Coldfire i Kinetis od środka
Tab. 10. Zestawienie podstawowych cech peryferiów VREF, PDB i FlexTimer
| Peryferium | Kluczowe cechy | Korzyści dla użytkownika |
| Źródło napięcia odniesienia (VREF) | Ustawianie: 8-bitowy rejestr dający krok 0,5 mV | Lepsza dokładność oraz korekcja odchyleń temperaturowych, napięciowych i przetwarzania. Eliminuje potrzebę korzystania z zewnętrznego źródła referencyjnego, obniżając koszt systemu |
| Programowalny blok opóźniający (PDB) | Możliwość integracji wielu peryferiów na potrzeby zastosowań wymagających czasowo i synchronizacyjnie | Jeden zestaw peryferiów może posłużyć w wielu zastosowaniach |
| FlexTimer (FTM) | Sprzętowe wstawianie czasu martwego i dekodowanie kwadraturowe | Sprawdza się przy sterowaniu silnikami |
FlexTimer
Moduł FlexTimer (FTM) został zaprojektowany głównie pod kątem sterowania silnikami prądu stałego i zmiennego, ale mimo to został wyposażony we wszystkie standardowe funkcje timera, takie jak: porównywanie wyjścia (output compare) czy zatrzaskiwanie wejścia (input capture). W układach sterowania silnikami FlexTimer zapewnia funkcje typowe dla specjalizowanego modułu PWM, takie jak: generacja sygnałów komplementarnych, sprzętowe wstawianie czasu martwego, kontrola maski i biegunowości oraz wykrywanie błędów. Ta elastyczność sprawia, że FlexTimer sprawdza się w wielu różnych zastosowaniach.

Rys. 26. Schemat blokowy modułu FlexTimer
Przykład sterowania silnikiem
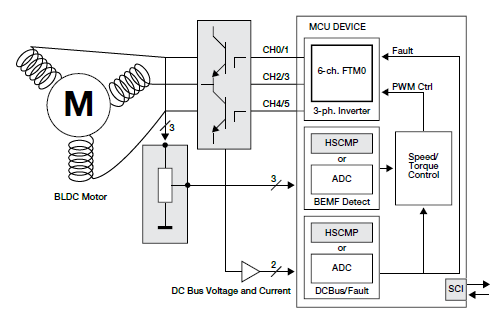
Zestawy zasobów mikrokontrolerów ColdFire+ Qx/Jx oraz Kinetis pozwalają na 6-stopniowe, wektorowe sterowanie bezszczotkowym silnikiem prądu stałego (BLDC) przy użyciu algorytmu nie wymagającego stosowania czujników. Szybki komparator jest używany do detekcji wstecznej siły elektromotorycznej (CEMF), 16-bitowy przetwornik A/C do pomiarów napięcia, a FlexTimer pracuje jako generator PWM. Pozwala to na realizację wielu funkcji, takich jak:
- automatyczne wstawianie czasu martwego,
- niezależne sterowanie zboczami,
- możliwość maskowania wyjścia,
- sprzętowe wyprowadzenie (pin) sygnału błędu na wejściu,
- możliwość realizacji zadań wymagających czasowo (dzięki wejściom i wyjściom wyzwalanym zdarzeniami).
Rys. 27. Przykład zastosowania: sterowanie silnikiem BLDC
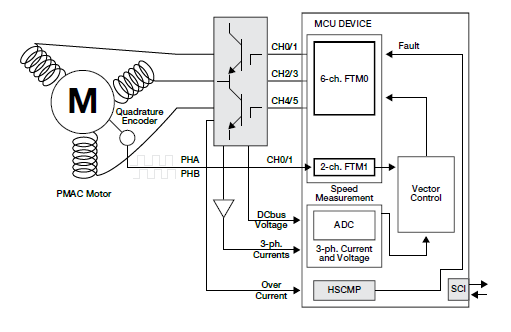
Silniki prądu zmiennego z magnesami trwałymi (PMAC) są popularne z uwagi na ich wysoką sprawność i możliwość precyzyjnego sterowania. Mikrokontrolery rodzin ColdFire+ Qx/Jx oraz Kinetis wyposażone są w kilka funkcji i modułów umożliwiających pełne wektorowe sterowanie trójfazowe:
- moduł FlexTimer z zaawansowanymi możliwościami generacji PWM,
- tryb dekodowania kwadraturowego FlexTimera, służący do pomiarów prędkości,
- szybki, 16-bitowy przetwornik A/C z sukcesywną aproksymacją do pomiarów prądu i napięcia,
- szybki komparator do dodatkowej kontroli błędów,
- obsługa instrukcji DSP, umożliwiających szybkie obliczenia.
Rys. 28. Przykład zastosowania: sterowanie silnikiem PMAC
 Grzegorz Kamiński: Dlaczego powstały tranzystory FinFET i GAAFET?
Grzegorz Kamiński: Dlaczego powstały tranzystory FinFET i GAAFET?  Google stawia na fuzję jądrową. AI potrzebuje coraz więcej energii
Google stawia na fuzję jądrową. AI potrzebuje coraz więcej energii  Fotowoltaika perowskitowa: od wydajności laboratoryjnej do masowej komercjalizacji
Fotowoltaika perowskitowa: od wydajności laboratoryjnej do masowej komercjalizacji 

![O konkursie organizowanym przez firmę TRUMPF Huettinger i polskie uczelnie techniczne opowiada Alicja Peresada i prof. Jacek Rąbkowski oraz kilkoro nagrodzonych dyplomantów: mgr inż. Jakub Dobosz, inż. Maja Zielińska, dr inż. Jakub Kołodziej, dr inż Weronika Hryniewska-Guzik i dr inż. Grzegorz Bartyzel. Zapraszamy do obejrzenia filmu! [materiał redakcyjny]](https://mikrokontroler.pl/wp-content/uploads/2026/07/TRUMPF-czolowka.png "https://www.youtube.com/watch?v=XkeyLmtLfxo")



