





Freescale Semiconductor MPL115: cyfrowy barometr MEMS
|
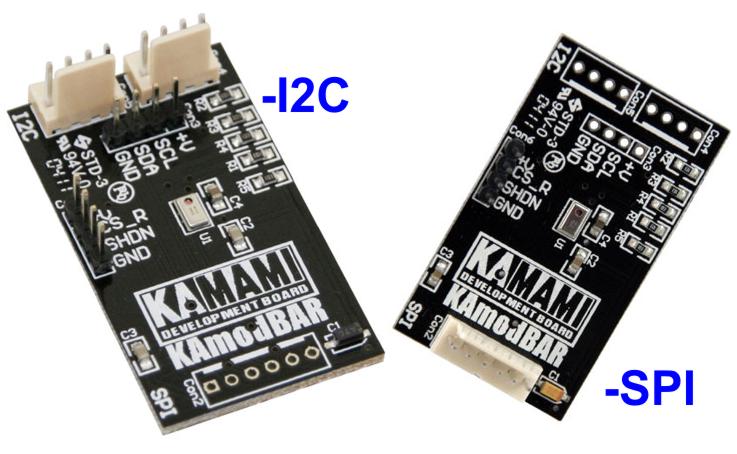
Moduły KAmodBAR są dostępne w dwóch wersjach, różniących się między sobą typem zastosowanego czujnika MEMS i wynikającym z tego rodzajem interfejsu komunikacyjnego:
|
Najpierw poprzez magistralę I2C wysłany zostaje do układu MPL115A2 rozkaz inicjujący pomiar bieżącego ciśnienia i temperatury. Efektem pomiaru są dwie 10-bitowe wartości.
W następnym kroku oprogramowanie odczytuje z wewnętrznych rejestrów MPL115A2 skonwertowane 10-bitowe wartości ciśnienia i temperatury oraz dodatkowe rejestry, w których umieszczone jest 96 bitów korekcyjnych. Po zakończeniu odczytu z kolejnych 16 rejestrów MPL115A2 następuje przeliczenie odczytanych danych na wartość rzeczywistego ciśnienia w kilopaskalach, korzystając z opublikowanego przez producenta układu wzoru:
Pcomp = a0 + (b1 + c11*Padc + c12*Tadc) * Padc + (b2 + c22*Tadc) * Tadc
Pod poszczególne składniki wzoru podstawiane są odczytane z układu wartości ciśnienia, temperatury i wyrażeń korekcyjnych. W oprogramowaniu demonstracyjnym wyliczeniem rzeczywistej wartości ciśnienia zajmuje się procedura int32_t Konwersja_Danych_Na_Wartosc_Cisnienia(char *p_bufor_odczytu).
Parametrem wejściowym jest wskaźnik do 16-bajtowej tablicy w której znajdują się dane odczytane z rejestrów MPL115A2 (od adresu 0x00 do 0x0F). Procedura zwraca wartość typu float będącą wartością ciśnienia w kilopaskalach. Poniżej listing wspomnianej procedury:
//procedura konwersji danych odczytanych z MPL115A2 na wartość ciśnienia w kPa
int32_t Konwersja_Danych_Na_Wartosc_Cisnienia(char *p_bufor_odczytu)
{
uint16_t uiPadc, uiTadc, u16_tmp;
int16_t sia0, sib1, sib2, sic12, sic11, sic22;
int32_t lt1, lt2, lt3, si_c11x1, si_a11, si_c12x2, si_a1, si_c22x2, si_a2, si_a1x1, si_y1, si_a2x2;
int32_t siPcomp;
float decPcomp;
//normalizacja surowych danych ciśnienia
uiPadc =*(p_bufor_odczytu+0);
uiPadc =uiPadc <<8;
uiPadc =uiPadc + *(p_bufor_odczytu+1);
uiPadc =uiPadc >>6;
//normalizacja surowych danych temperatury
uiTadc =*(p_bufor_odczytu+2);
uiTadc =uiTadc <<8;
uiTadc =uiTadc + *(p_bufor_odczytu+3);
uiTadc =uiTadc >>6;
//formowanie 16 bitowych wartości danych kompensujących
//coeff a0
u16_tmp =*(p_bufor_odczytu+4);
u16_tmp =u16_tmp <<8;
u16_tmp =u16_tmp + *(p_bufor_odczytu+5);
sia0=u16_tmp;
//coeff b1
u16_tmp =*(p_bufor_odczytu+6);
u16_tmp =u16_tmp <<8;
u16_tmp =u16_tmp + *(p_bufor_odczytu+7);
sib1=u16_tmp;
//coeff b2
u16_tmp =*(p_bufor_odczytu+8);
u16_tmp =u16_tmp <<8;
u16_tmp =u16_tmp + *(p_bufor_odczytu+9);
sib2=u16_tmp;
//coeff c12
u16_tmp =*(p_bufor_odczytu+10);
u16_tmp =u16_tmp <<8;
u16_tmp =u16_tmp + *(p_bufor_odczytu+11);
sic12 =u16_tmp;
//coeff c11
u16_tmp =*(p_bufor_odczytu+12);
u16_tmp =u16_tmp <<8;
u16_tmp =u16_tmp + *(p_bufor_odczytu+13);
sic11=u16_tmp;
//coeff c22
u16_tmp =*(p_bufor_odczytu+14);
u16_tmp =u16_tmp <<8;
u16_tmp =u16_tmp + *(p_bufor_odczytu+15);
sic22=u16_tmp;
//obliczanie skompensowanej wartości ciśnienia zgodnie z formułą:
// Pcomp = a0 + (b1 + c11*Padc + c12*Tadc) * Padc + (b2 + c22*Tadc) * Tadc
//krok 1: c11x1= c11 * Padc
lt1 = sic11;
lt2 = uiPadc;
lt3 = lt1 * lt2;
si_c11x1 = lt3;
//krok 2: a11= b1 + c11x1
lt1 = sib1;
lt1 = lt1<<14;
lt2 = si_c11x1;
lt3 = lt1 + lt2;
si_a11 = lt3>>14;
//krok 3: c12x2= c12 * Tadc
lt1 = sic12;
lt2 = uiTadc;
lt3 = lt1 * lt2;
si_c12x2 = lt3;
//krok 4: a1= a11 + c12x2
lt1 = si_a11;
lt1 = lt1<<11;
lt2 = si_c12x2;
lt3 = lt1 + lt2;
si_a1 =lt3>>11;
//krok 5: c22x2= c22 * Tadc
lt1 = sic22;
lt2 = uiTadc;
lt3 = lt1 * lt2;
si_c22x2 = lt3;
//krok 6: a2= b2 + c22x2
lt1 = sib2;
lt1 = lt1<<15;
lt2 = si_c22x2>>1;
lt3 = lt1+lt2;
si_a2 = lt3>>16;
//krok 7: a1x1= a1 * Padc
lt1 = si_a1;
lt2 = uiPadc;
lt3 = lt1 * lt2;
si_a1x1 = lt3;
//krok 8: y1= a0 + a1x1
lt1 = sia0;
lt1 = lt1<<10;
lt2 = si_a1x1;
lt3 = lt1 + lt2;
si_y1 = lt3>>10;
//krok 9: a2x2= a2 *Tadc
lt1 = si_a2;
lt2 = uiTadc;
lt3 = lt1 * lt2;
si_a2x2 = lt3;
//krok 10: pComp = y1 +a2x2
lt1 = si_y1;
lt1 = lt1<<10;
lt2 = si_a2x2;
lt3 = lt1 + lt2;
//stałoprzecinkowy rezultat obliczeń
siPcomp = lt3>>13;
siPcomp =siPcomp & 0xFFFF;
//ciśnienie dl zakresu 50 to 115kPa
decPcomp = ((65.0/1023.0)*siPcomp)+50;
return decPcomp;
}
Otrzymana wartość steruje świeceniem diod LED. Dla wartości mniejszych lub równych 100kPa świeci się dioda D0. Przy odczycie ciśnienia o większej wartości zapalają się kolejne diody, sygnalizując zmianę ciśnienia 1 kPa/LED.
Przy opracowaniu procedury korzystano z noty aplikacyjnej AN3785 Rev.5 opublikowanej przez Freescale Semiconductors autorstwa Johna Younga.
Ryszard Szymaniak, Aries RS
 Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle
Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle  Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników
Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników  AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii
AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii 






