





Nowa wersja firmware dla GPS firmy u-blox

Niesłabnące zapotrzebowanie na coraz wydajniejsze systemy GPS jest dużym wyzwaniem dla producentów odbiorników GPS. Obecny stan światowego systemu GPS jest wynikiem wielu kosztownych operacji wyniesienia satelitów GPS na orbitę, co zaczęło się ponad 30 lat temu. Jako że satelity te stanowią system mocno ugruntowany i trudno oczekiwać ulepszeń czy usprawnień po ich stronie, odpowiedzialność za wydajność i możliwości całego systemu GPS spoczywa głównie na producentach i projektantach odbiorników. Są dwa podstawowe ograniczenia obecnego sytemu satelitów GPS:
- wyjątkowo słabe poziomy sygnałów GPS: satelity znajdują się w odległości 20000 km od Ziemi. Sygnały, które nadają, mają w momencie dotarcia do odbiornika poziom ok. -120 dBm, a w środowiskach miejskich mogą być jeszcze słabsze lub dodatkowo zdegradowane. Sprawia to, że wyizolowanie ich z szumów tła i zakłóceń jest prawdziwym wyzwaniem.
- bardzo wolny przepływ sygnałów: kompletna ramka informacji GPS, zawierająca 1500 bitów jest odbierana przez 30 sekund (co daje transfer zaledwie 50 b/s!). Co więcej, aby określić pozycję odbiornika, konieczne jest zlokalizowanie czterech różnych satelitów i pobranie od nich ramek.
Problemy te utrudniają odbiornikom znalezienie sygnałów satelitów GPS i utrzymanie z nimi łączności, zwłaszcza przy „zimnym starcie” (gdy odbiornik jest włączany po długim okresie wyłączenia i nie ma w pamięci namiarów na widoczne satelity). Gdy upłynie czas konieczny do odnalezienia satelitów, pobranie ramek danych potrzebnych do obliczenia pozycji w środowiskach o bardzo niskim poziomie sygnału może zająć nawet 30 sekund lub więcej. Te ograniczenia mogą zniweczyć marzenia o ciągłym podawaniu dokładnego położenia.
Aby można było zminimalizować negatywne skutki tych ograniczeń, potrzebny jest rozwój innowacyjnych rozwiązań po stronie odbiornika, pozwalających wyłuskać lepszą wydajność z systemu GPS. u-blox, jedna z kilku firm na świecie specjalizujących się w projektowaniu odbiorników GPS, zrobił to wydając siódmą wersję firmaware’u dla platformy odbiorczej u-blox 6.
Wyzwania stojące przed odbiornikami:
- szybsze odszukiwanie sygnałów z satelitów,
- szybsze odbieranie i przetwarzanie danych o położeniu orbitalnym satelitów,
- mniejsze zużycie energii,
- wykorzystanie możliwość współdziałania z systemami łączności bezprzewodowej, aby osiągać lepszą efektywność i wdrażać nowe funkcjonalności.
Ostatnia aktualizacja oprogramowania dla modułów firmy u-blox 6 (nazwana firmware 7) implementuje zaawansowane sprzętowe, software’owe i dodatkowe ulepszenia poprawiające wydajność nawigacji GPS w kilku jej głównych obszarach, co zostało opisane w kolejnych paragrafach.
Zwiększona czułość i poprawione lokalizowanie
Aby odpowiedzieć na rynkowy trend coraz większej miniaturyzacji urządzeń elektroniki konsumenckiej, takich jak smartphone’y i odbiorniki osobiste, używane są w nich tylko najmniejsze, montowane powierzchniowo anteny. W rezultacie, aby odebrać wyjątkowo słabe sygnały GPS, konieczne jest zwiększanie czułości odbiornika. Ostatnia wersja odbiorników u-blox 6 odpowiada na te wymagania poprzez:
- zwiększoną czułość akwizycji: czyli najniższą moc sygnału, dla jakiej odbiornik jest w stanie ustalić pierwszą pozycję, zwykle przy włączaniu odbiornika po długim okresie wyłączenia. Wartość ta ma bezpośrednie przełożenie na czas, jaki zajmuje wyizolowanie sygnałów satelitów GPS z szumu tła i akwizycja danych efemeryd. Ostatnia aktualizacja osiąga czułość o 1 dB lepszą niż poprzednia generacja.
- poprawioną czułość śledzenia (trackingu): jest to najniższa moc sygnału, dla jakiej odbiornik może śledzić pojedynczego satelitę i ma ona bezpośredni wpływ na ciągłą pracę odbiornika, szczególnie w trudnych środowiskach, takich jak „kaniony miejskie” (urban canyons). Ostanie poprawki do firmware’u wersji 7 zmniejszyły tę wartość do -162 dBm.
- zwiększoną czułość reakwizycji: jest to parametr typowy dla sytuacji wyjeżdżania z tuneli, w których dostęp do satelitów GPS jest niemożliwy. Ten parametr został poprawiony o 5 dB w stosunku do poprzedniej wersji. Może to pozwolić na oszczędność cennych sekund w krytycznych sytuacjach, takich jak decyzja o tym czy skręcić w lewo czy w prawo tuż po wyjeździe z garażu czy parkingu podziemnego.
- poprawiona dokładność określania położenia dzięki monitorowaniu RTCM: z ostatnią aktualizacją firmware’u odbiorniki u-blox stały się kompatybilne z protokołem RTCM (ang. Radio Technical Commission for Maritime Services), co pozwoliło na zwiększenie dokładności określania położenia, dzięki różnicowym danym korekcyjnym odbieranym przez boje RTCM. Zapewniają one dane korekcyjne dla sygnałów pojedynczych satelitów GPS, które mogą być zniekształcone wskutek niekorzystnych warunków atmosferycznych. Jest to szczególnie przydatne w odbiornikach dla żeglugi.
Szybsze ustalanie pozycji bez zewnętrznego wspomagania w oparciu o predykcję orbity satelity
AssistNow™ Autonomous to nazwa nowej, darmowej funkcji wbudowanej w odbiorniki u-blox 6 z firmwarem wersji 7, która daje podobne możliwości jak AGPS (Assisted-GPS), ale nie wymaga hosta ani połączenia z żadną siecią zewnętrzną. AssistNow Autonomous generuje dokładne informacje o orbicie satelity (nazywane AssistNow Autonomous data), przydatne w następnych poprawkach położenia. Dzieje się to w oparciu o wcześniejsze, transmitowane broadcastowo efemerydy, pobierane i zapamiętywane w odbiorniku.

Rys. 1. AssistNow Autonomous: Nowa funkcja odbiornika u-blox 6: szybsze obliczanie pozycji w oparciu o predykcję efemeryd, nie wymagające łączności z dodatkowymi sieciami ani hosta
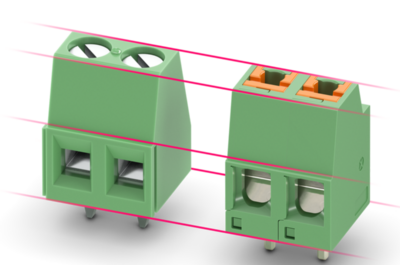 Zmiana technologii przyłączeniowej bez modyfikacji PCB? Konstrukcja TWIN w terminalach SPTH od Phoenix Contact
Zmiana technologii przyłączeniowej bez modyfikacji PCB? Konstrukcja TWIN w terminalach SPTH od Phoenix Contact 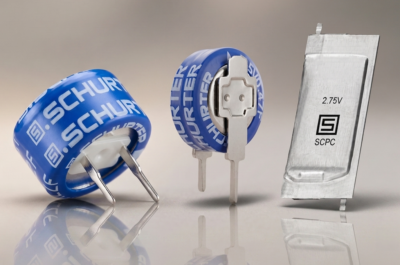 Nowość w ofercie firmy SCHURTER: superkondensatory – ultrakompaktowe i jednocześnie niezwykle wydajne
Nowość w ofercie firmy SCHURTER: superkondensatory – ultrakompaktowe i jednocześnie niezwykle wydajne  Dyrektywy ATEX a materiały wybuchowe – gdzie kończy się zakres przepisów?
Dyrektywy ATEX a materiały wybuchowe – gdzie kończy się zakres przepisów? 

![O konkursie organizowanym przez firmę TRUMPF Huettinger i polskie uczelnie techniczne opowiada Alicja Peresada i prof. Jacek Rąbkowski oraz kilkoro nagrodzonych dyplomantów: mgr inż. Jakub Dobosz, inż. Maja Zielińska, dr inż. Jakub Kołodziej, dr inż Weronika Hryniewska-Guzik i dr inż. Grzegorz Bartyzel. Zapraszamy do obejrzenia filmu! [materiał redakcyjny]](https://mikrokontroler.pl/wp-content/uploads/2026/07/TRUMPF-czolowka.png "https://www.youtube.com/watch?v=XkeyLmtLfxo")



