





Robot „Orangutan” – budowa krok po kroku
Budowa robotów dla wielu osób może się wydawać czynnością rodem z opowiadać SF – kojarzyć się ze sterylnym laboratorium, specjalistycznymi narzędziami i kadrą światowej klasy naukowców, głowiącymi się nad skomplikowanymi równaniami. Prawda odbiega jednak od tych wyobrażeń i – choć może to brzmieć dla niektórych zaskakująco – praktycznie każdy jest w stanie skonstruować i zaprogramować robota w domowym zaciszu, przy pomocy ogólnodostępnych narzędzi, nie posiadając doktoratu z elektroniki, informatyki ani mechaniki. Rozwój technologii na przestrzeni lat, powszechny dostęp do Internetu, komercjalizacja rynku robotyki określanej mianem hobbystycznej – to wszystko sprawiło, że robotyka rozpowszechniła się na całym świecie i z każdym dniem rzesze ludzi pracują nad popularyzacją tej dziedziny nauki wśród „szarych obywateli”.
Po co budować robota? Na to pytanie nie ma jednoznacznej odpowiedzi. Dla kogoś może to być ciekawy sposób na naukę obsługi danego typu mikrokontrolera, ktoś inny odczuwa ogromną satysfakcję budując sztuczne stworzenie, które samo „myśli” i podejmuje decyzje, jeszcze ktoś inny może chcieć uprościć sobie życie tworząc robota, który wyręczy go w żmudnych obowiązkach… Przyczyn może być wiele. Bez względu na cel – należy wiedzieć, że robotyka jest bardzo interdyscyplinarną dziedziną nauki, przez co zdobyta wiedza i doświadczenie mogą przydać się w wielu życiowych sytuacjach.
Napisałem, że każdy może zbudować robota w domowym zaciszu, bez specjalistycznej wiedzy i narzędzi. Co jeśli dodam, że można tego dokonać w ciągu zaledwie paru godzin? Nierealne? W takim razie zapraszam do przeczytania tego artykułu i do przekonania się o tym na własnej skórze. Poniższe zdjęcia i film prezentują efekt końcowy poprawnego wykonania wszystkich instrukcji.
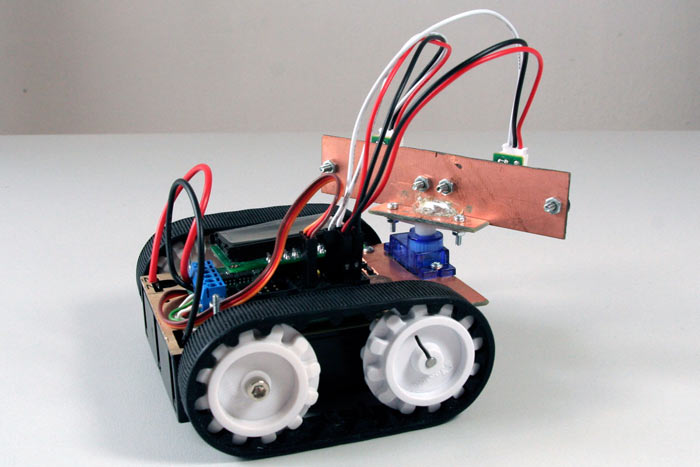
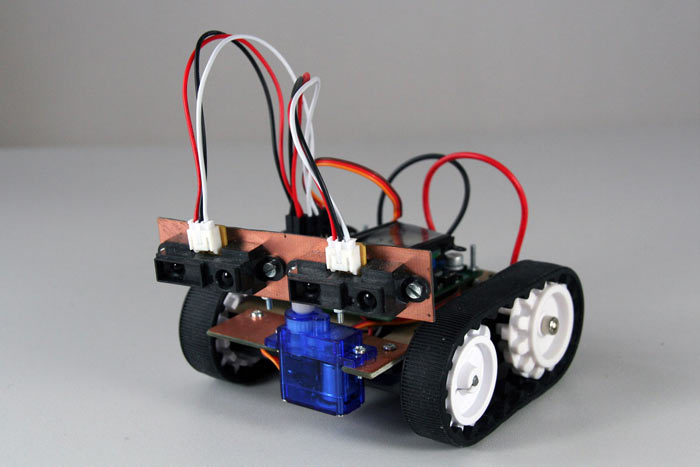
Wygląd gotowego robota „Orangutan”
Film prezentujący działanie robota
Przed rozpoczęciem budowy, msuimy się zaopatrzeć w niezbędne podzespoły. Większość wymienionych poniżej części można otrzymać w sklepie internetowym KAMAMI.pl.
- Sterownik Orangutan SV-328
- Podwozie Zumo Chassis Kit (Pololu 1418)
- Dwa miniaturowe silniki szczotkowe DC pasujące do podwozia, np. Mirco Metal Gearmotor 150:1
- Miniaturowe serwo modelarskie, np. SG90
- Dwa dalmierze optyczne typu SHARP o zasięgu 4..30cm, np. GP2Y0A41SK0F
- Dwa przewody połączeniowe do dalmierzy optycznych, np. CAB_F
- Zestaw przewodów „uniwersalnych”, np. CAB_C (40-F-F), mogą być także np. przewody z tzw. skrętki komputerowej
- Gniazda goldpin 1×1 na przewód, np. BLS01 i BLT-LF
- Śruby i nakrędki M2.5 oraz M3, można je znaleźć np. tutaj
- Materiał do zbudowania uchwytu na czujniki – profil aluminiowy, drewno, laminat szklano-epoksydowy (taki sam, jak w PCB) itp.
- Akumulatory lub baterie AA – do kupienia w kioskach lub np. w sklepie KAMAMI.pl
Narzędzia
- Programator mikrokontrolerów AVR, np. STK200 jeśli posiadamy komputer z LPT, STK500v2 jeśli posiadamy tylko porty USB lub droższy ZL20PRG, jeśli planujemy rozwijać się pod kątem programowania rodziny AVR
- Przejściówka do programatora 10pin/6pin wykonana z przewodów lub gotowa, np. KAmodISP
- Śrubokręt, kombinerki
- Lutownica z cyną, wystarczy najtańsza
- Piła, wiertarka, miniszlifierka, klej lub inne narzędzia potrzebne do wykonania uchwytu do czujników (ja skorzystałem z miniszlifierki z wymiennymi tarczami i wiertłami)
Oprogramowanie
Do zaprogramowania robota potrzebujemy tak naprawdę tylko darmowego środowiska programistycznego Atmel Studio 6, do pobrania ze strony producenta. Oprócz tego, przydatne są jeszcze biblioteki firmy Pololu.
Do pobrania Atmel Studio wymagana jest rejestracja i potwierdzenie swojego adresu e-mail. Po wykonaniu wszystkich kroków, pobieramy instalator i wykonujemy pełną instalację. Po poprawnej instalacji środowiska, pobieramy i instalujemy biblioteki Pololu AVR Development Bundle for Windows. Najlepiej zaznaczyć wszystkie opcje i zatwierdzić domyślną ścieżkę dostępu.
 Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle
Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle  Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników
Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników  AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii
AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii 




