





Robot „Orangutan” – budowa krok po kroku
Wgrywanie oprogramowania
Jeśli nasz kod jest już gotowy, to musimy go skompilować. W środowisku Atmel Studio 6 dokonuje się tego wybierając zakładkę Build -> Build Solution lub naciskajac przycisk F7. Na dole okna zaczną pojawiać się komunikaty. Jeśli na końcu kompilacji wyświetli nam się informacja
„========== Build: 1 succeeded or up-to-date, 0 failed, 0 skipped ==========”, to wszystko jest w porządku. W przeciwnym wypadku musimy prześledzić wyświetlone błędy, poprawić je i spróbować ponownie.
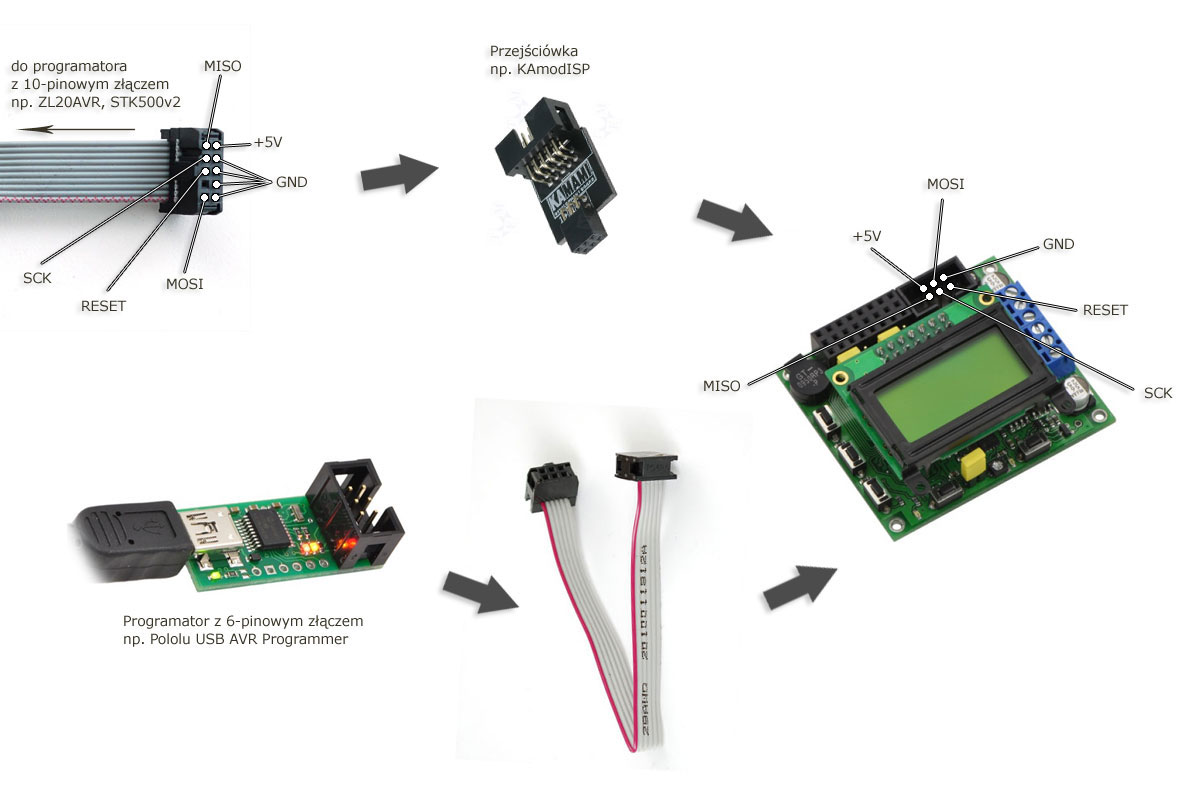
Podczas kompilacji tworzy się specjalny plik, który możemy wgrać do naszego mikrokontrolera. Aby to zrobić, potrzebujemy zaopatrzeć się w urządzenie zwane programatorem. Istnieją różne rodzaje, kilka z nich podałem na początku artykułu. Każdy posiada nieco inne ustawienia – jedne są obsługiwane bezpośrednio z Atmel Studio 6, inne wymagają dodatkowej aplikacji – szczegóły można znaleźć w instrukcjach producentów. Po skonfigurowaniu programatora, wgrywamy plik, który tworzy się w katalogu Debug naszego projektu i ma rozszerzenie .hex. Sposób podłączenia programatora do płytki sterownika wyjaśnia poniższy rysunek:
Należy pamiętać, że robot musi być włączony w trakcie programowania – włącza się go jednym z przycisków pod wyświetlaczem. Jeśli wcześniej wgrywaliśmy jakiś kod, to warto ustawić podwozie na jakiejś podpórce – na wypadek, gdyby silniki zaczęły się obracać.
Po poprawnym skompilowaniu i wgraniu oprogramowania, robot powinien jechać przed siebie, próbować ominąć przeszkodę w dużej odległości, a w przypadku gdyby nie zdążył – zatrzymać się, rozejrzeć i wybrać bezkolizyjną trasę. Podany wwcześniej program jest odpowiedzialny za zachowanie widoczne w filmie, na początku artykułu. Gdy już nasza konstrukcja zacznie się poruszać i zachowywać w przewidziany sposób, nic nie stoi na przeszkodzie, by napisać program od zera, wprowadzić własne poprawki lub kompletnie zmienić koncepcję i np. wprowadzić czynnik losowy (np. wykorzystując funkcję rand() przy podejmowaniu decyzji). Można także wykorzystać zintegrowany ze sterownikiem buzzer i funkcję play_note(), dając robotowi opcję „komunikacji” werbanej, np. w sposób podobny do R2D2 z filmu „Gwiezdne Wojny”. Możliwości jest wiele, na pewno po ukończeniu budowy każdy będzie miał własne pomysły. Powodzenia!
 Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle
Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle  Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników
Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników  AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii
AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii 




