





Krok-po-kroku: sam zrób robota FREEbot
Po podłączeniu czujników, składamy sterownik z płytką mostka i montujemy je na stałe. Do montażu korzystamy z tulejek dystansowych – istnieje możliwość wykorzystania kilku fabrycznych otworów w podwoziu, ale nie wszystkie tuleje będziemy mogli wówczas przykręcić. Proponuję wywiercić dodatkowe otwory, o ile oczywiście dysponujemy wiertarką. Pozwoli to na stabilniejszy montaż elektroniki oraz ułożenie czujników dokładnie w osi robota.

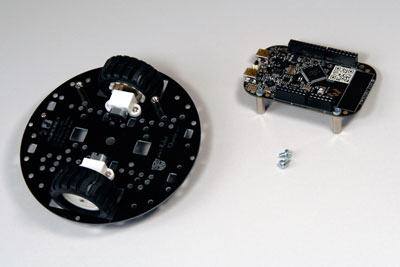
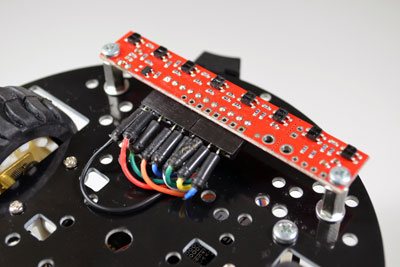
Zastosowanie tulej dystansowych przy montażu elektroniki
Pozostało podłączenie zasilania do wszystkich podzespołów. Do tego celu warto posłużyć się poniższym rysunkiem, a przed zainstalowaniem akumulatora – upewnić się, że GND i Vin na płytce Arduino Motor Shield R3 nie są ze sobą zwarte dla żadnego ze stanów przełącznika.
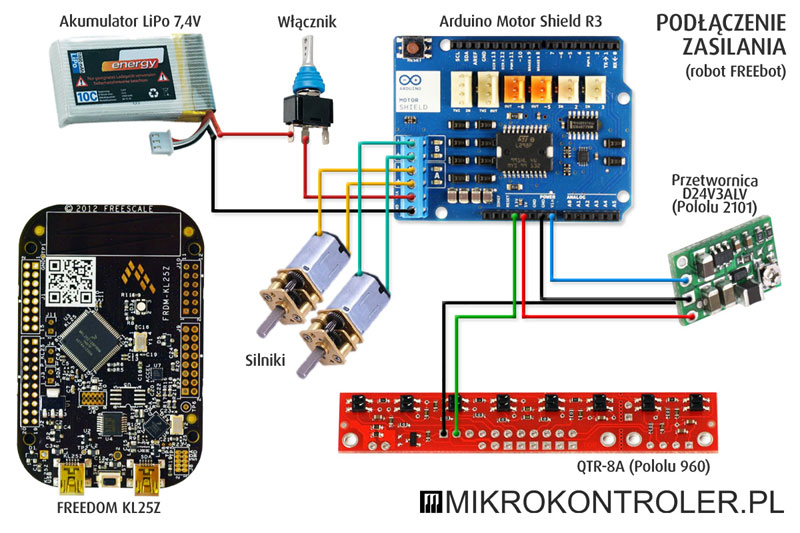
Podłączenie zasilania w robocie FREEbot
W celu przymocowania akumulatora oraz przetwornicy do chassis robota, można skorzystać ze zwykłych gumek recepturek – umożliwią w przyszłości łatwy demontaż podzespołów. Akumulator z powodzeniem można „wcisnąć” pomiędzy chassis i KL25Z – jeśli jest luźny, grubiej obwiązujemy go gumką.

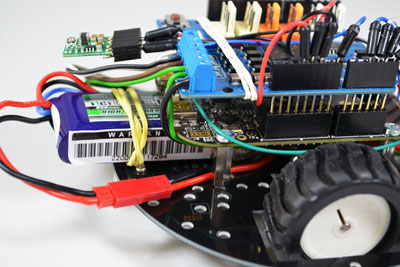
Montaż akumulatora oraz przetwornicy
Przełącznik należy zamocować w miejscu łatwo dostępnym i w jak nastabilniejszy sposób. Jeśli robotowi przytrafi się awaria (zwarcie, zablokowane koła, dziwne zachowanie itp.), to musimy być w stanie natychmiast odłączyć go od źródła zasilania. Ja skorzystałem ze zwykłej, plastikowej opaski – jak na zdjęciu poniżej.
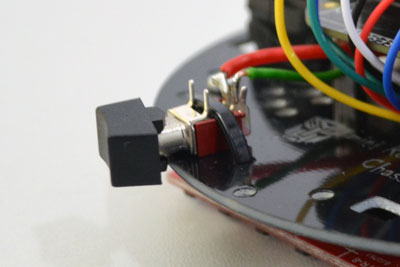
Montaż włącznika
Złożony w powyższy sposób robot jest gotowy do działania. Teraz musimy już tylko wgrać do niego oprogramowanie. Uruchamiamy środowisko Code Warrior, otwieramy rozpakowany wcześniej projekt z załącznika do tego artykułu, odłączamy FREEbota od akumulatora, podłączamy kabel USB i wgrywamy oprogramowanie do mikrokontrolera – szczegóły można znaleźć w plikach pomocy do Code Warrior. Jeśli wykonaliśmy wszystkie kroki poprawnie, to możemy się cieszyć działającym robotem. Powodzenia!
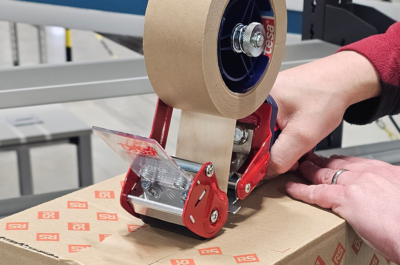 Jedna taśma – tysiące paczek: RS i tesa łączą logistykę i ESG
Jedna taśma – tysiące paczek: RS i tesa łączą logistykę i ESG 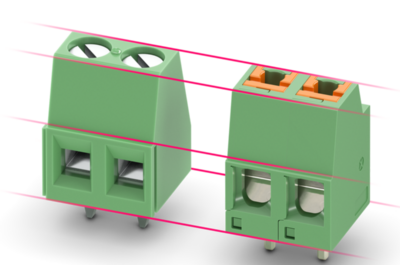 Zmiana technologii przyłączeniowej bez modyfikacji PCB? Konstrukcja TWIN w terminalach SPTH od Phoenix Contact
Zmiana technologii przyłączeniowej bez modyfikacji PCB? Konstrukcja TWIN w terminalach SPTH od Phoenix Contact 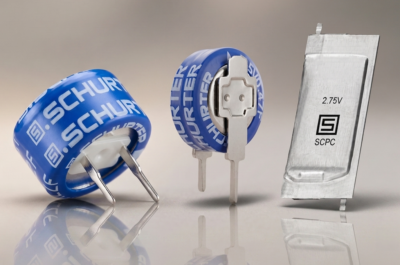 Nowość w ofercie firmy SCHURTER: superkondensatory – ultrakompaktowe i jednocześnie niezwykle wydajne
Nowość w ofercie firmy SCHURTER: superkondensatory – ultrakompaktowe i jednocześnie niezwykle wydajne 

![O konkursie organizowanym przez firmę TRUMPF Huettinger i polskie uczelnie techniczne opowiada Alicja Peresada i prof. Jacek Rąbkowski oraz kilkoro nagrodzonych dyplomantów: mgr inż. Jakub Dobosz, inż. Maja Zielińska, dr inż. Jakub Kołodziej, dr inż Weronika Hryniewska-Guzik i dr inż. Grzegorz Bartyzel. Zapraszamy do obejrzenia filmu! [materiał redakcyjny]](https://mikrokontroler.pl/wp-content/uploads/2026/07/TRUMPF-czolowka.png "https://www.youtube.com/watch?v=XkeyLmtLfxo")



