





[JAK NAPISAĆ DRIVER] STM32NUCLEO + mbed.org + graficzny LCD = druga aplikacja na STM32 w sieciowym środowisku programistycznym
W odpowiednim pliku implementacyjnym NokiaLCD.cpp definiujemy wszystkie funkcje jakie są zawarte w powyższej definicji klasy. Pierwsze i najważniejsze funkcje realizują programowy interfejs SPI umożliwiający wysyłanie komend oraz danych do kontrolera wyświetlacza:
/* ***************************** */
/* *** SPI-related functions *** */
/* ***************************** */
void NokiaLCD::spi_write(unsigned char data) {
CLK = 1;
for(int i = 0; i < 8; ++i){
CLK = 0;
if(data&0x80)
DATA = 1;
else
DATA = 0;
CLK = 1;
data <<= 1;
}
}
void NokiaLCD::spi_writeCommand(unsigned char cmd) {
CS = 0;
CLK = 0;
DATA = 0; // For commands the first bit is 0
spi_write(cmd);
CS = 1;
}
void NokiaLCD::spi_writeData(unsigned char data) {
CS = 0;
CLK = 0;
DATA = 1; // For data the first bit is 1
spi_write(data);
CS = 1;
}
Równie istotny jest konstruktor klasy NokiaLCD, który przyjmuje cztery argumenty typu PinName (nazwy linii GPIO) i wykorzystuje je przy inicjalizacji zmiennych typu DigitalOut (przeprowadzanej na liście inicjalizacyjnej). Wewnątrz konstruktora wykonywana jest jeszcze inicjalizacja wyświetlacza, przez od razu po utworzeniu obiektu klasy NokiaLCD można rysować dowolne elementy na ekranie:
NokiaLCD::NokiaLCD(PinName cs, PinName clk, PinName data, PinName res)
: CLK(clk), CS(cs), DATA(data), RES(res) {
CS = 1;
CLK = 1;
DATA = 1;
// Hardware reset
RES = 0;
wait_ms(100);
RES = 1;
wait_ms(100);
// Sleep out
spi_writeCommand(SLEEPOUT);
// Inversion on
spi_writeCommand(INVOFF);
// Color Interface Pixel Format
spi_writeCommand(COLMOD);
spi_writeData(0x05); // 0x05 = 16 bits-per-pixel
// Memory access controler
spi_writeCommand(MADCTL);
spi_writeData(0x10);
wait_ms(10);
// Display On
spi_writeCommand(DISPON);
}
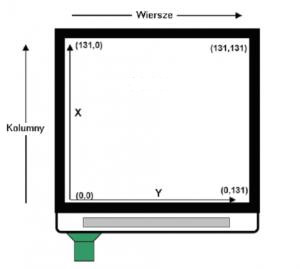
Rys. 5. Domyślna orientacja osi X i Y
Użyta w powyższym kodzie komenda MADCTL pozwala ustawić orientację osi X i Y (rysunki 5 i 6), natomiast komenda COLMOD wybiera format w jakim będą przesyłane wartości kolorów i w danym przykładzie do tego celu są potrzebne 2 bajty (rysunek 7).
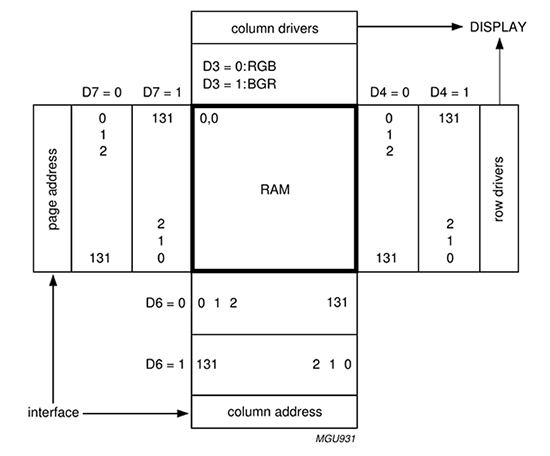
Rys. 6. Orientacja osi X i Y w zależności od wartości bitów danych komendy MADCTL

Rys. 7. Ramki wartości kolorów w formacie RGB565
Funkcja czyszcząca ekran zadanym kolorem za pomocą komend CASET oraz PASET ustawia zakres wartości współrzędnych w jakim będzie operować, a następnie w pętli zapisuje wartości poszczególnych pikseli. W przypadku ustawiania kontrastu wystarczy za pomocą komendy SETCON wysłać wartość z przedziału od -64 do 63:
/* ************************* */
/* *** Control functions *** */
/* ************************* */
void NokiaLCD::clear(unsigned int color) {
// Set column address range
spi_writeCommand(CASET);
spi_writeData(0);
spi_writeData(131);
// Set page(row) address range
spi_writeCommand(PASET);
spi_writeData(0);
spi_writeData(131);
// Write memory
spi_writeCommand(RAMWR);
for(int i = 0; i < (132 * 132); i++) { // Write R[4:0] and G[5:3] spi_writeData( (color >> 8)&0xFF );
// Write G[2:0] and B[4:0]
spi_writeData( color&0xFF );
}
}
void NokiaLCD::setContrast(char contrast) {
// Contrast value should be in range
spi_writeCommand(SETCON);
spi_writeData(contrast);
}
Funkcje do rysowania pojedynczych pikseli oraz wypełniania wskazanego obszaru pod względem implementacji wyglądają podobnie jak funkcja czyszczenia ekranu:
/* ********************************** */
/* *** Graphics-related functions *** */
/* ********************************** */
void NokiaLCD::drawPixel(int x, int y, unsigned int color) {
// Set column address range
spi_writeCommand(CASET);
spi_writeData(x);
spi_writeData(131);
// Set page(row) address range
spi_writeCommand(PASET);
spi_writeData(y);
spi_writeData(131);
// Write memory
spi_writeCommand(RAMWR);
// Write R[4:0] and G[5:3]
spi_writeData( (color >> 8)&0xFF );
// Write G[2:0] and B[4:0]
spi_writeData( color&0xFF );
}
void NokiaLCD::fillRect(int x, int y, int width, int height, unsigned int color) {
// Set column address range
spi_writeCommand(CASET);
spi_writeData(x);
spi_writeData(x + width - 1);
// Set page(row) address range
spi_writeCommand(PASET);
spi_writeData(y);
spi_writeData(y + height - 1);
// Write memory
spi_writeCommand(RAMWR);
for(int i = 0; i < (width * height); i++){ // Write R[4:0] and G[5:3] spi_writeData( (color >> 8)&0xFF );
// Write G[2:0] and B[4:0]
spi_writeData( color&0xFF );
}
}
 Fotowoltaika perowskitowa: od wydajności laboratoryjnej do masowej komercjalizacji
Fotowoltaika perowskitowa: od wydajności laboratoryjnej do masowej komercjalizacji  Czy kamery termowizyjne pokazują nam całą prawdę?
Czy kamery termowizyjne pokazują nam całą prawdę?  Generowanie ujemnego napięcia odniesienia – eksperymenty z zestawem ADALM2000
Generowanie ujemnego napięcia odniesienia – eksperymenty z zestawem ADALM2000 

![O konkursie organizowanym przez firmę TRUMPF Huettinger i polskie uczelnie techniczne opowiada Alicja Peresada i prof. Jacek Rąbkowski oraz kilkoro nagrodzonych dyplomantów: mgr inż. Jakub Dobosz, inż. Maja Zielińska, dr inż. Jakub Kołodziej, dr inż Weronika Hryniewska-Guzik i dr inż. Grzegorz Bartyzel. Zapraszamy do obejrzenia filmu! [materiał redakcyjny]](https://mikrokontroler.pl/wp-content/uploads/2026/07/TRUMPF-czolowka.png "https://www.youtube.com/watch?v=XkeyLmtLfxo")



