





DEWE2-A4 – modułowy system pomiarów w czasie nierzeczywistym
Nieczęsto trafiają do testów urządzenia takie, jak opisany w niniejszym artykule Modułowy System Akwizycji Danych DEWE2-A4. Urządzenie to jest produkowane przez firmę Dewetron, którą bez najmniejszej kokieterii można zaliczyć do światowych liderów tej branży. Możliwości tego przyrządu są naprawdę imponujące, tylko popatrzmy.

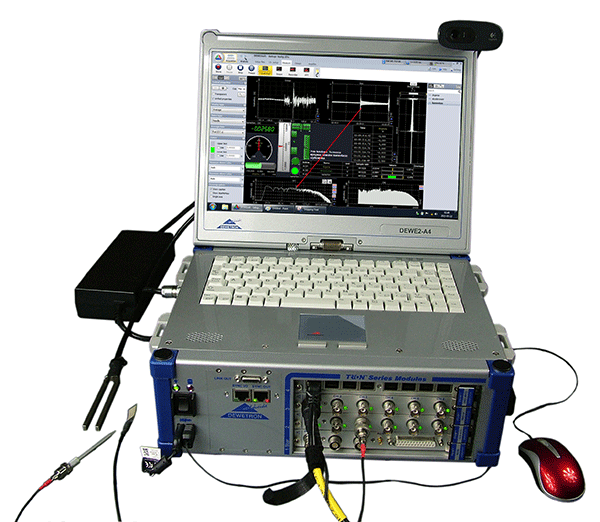
DEWE2-A4 będzie w artykule nazywany krótko rejestratorem, należy jednak pamiętać, że oryginalna nazwa – Modułowy System Akwizycji Danych – pełniej charakteryzuje przyrząd. Można uznać, że jest to mały, przenośny komputer z procesorem i7 i systemem Windows 7 zamknięty w bardzo solidnej obudowie metalowej o wymiarach 318×253×128 mm, chroniącej zawartą w niej elektronikę przed ewentualnymi urazami, o które nietrudno w ciężkich warunkach terenowych (fot. 1). W pokrywie zamontowano wyświetlacz LCD o przekątnej 13 cali z matrycą 1280×800 punktów. Na górnej ścianie umieszczono klawiaturę komputerową wraz z touchpadem, tak jak w typowym notebooku lub laptopie. Podobnie rozwiązano rozmieszczenie licznych gniazd interfejsów, są więc one dostępne na ściankach bocznych obudowy. O zaletach rejestratora w dużym stopniu decydują jego imponujące możliwości pomiarowe osiągnięte dzięki modułowej budowie.
Fot. 1. Modułowy System Akwizycji Danych DEWE2-A4
Modułowość
Część komputerowa stanowi trzon przyrządu i jest wykorzystywana do obróbki, transferu i wizualizacji danych zbieranych przez wymienne moduły pomiarowe. Moduły te są umieszczane w czterech slotach znajdujących się na przedniej ściance urządzenia. Chociaż już same moduły rejestratora zapewniają duże możliwości pomiarowe – przykładowo, jeden moduł analogowy zawiera od 6 do 8 wejść pomiarowych – to system można rozbudowywać o kolejne synchronizowane rejestratory, stacje front-end lub mainframe. Całość jest obsługiwana jednym programem.
Rejestrator DEWE2-A4 wykorzystuje 4 rodzaje wymiennych modułów. Są to:
- moduły binarne/cyfrowe/odmierzające czas,
- moduły interfejsu magistrali cyfrowej,
- moduły kondycjonowania danych analogowych,
- moduły synchronizacji i taktowania.
Idea pomiarów prowadzonych z użyciem DEWE2-A4 zakłada pełną synchronizację wszystkich kanałów w całym systemie. Jeśli więc system składa się z kilku urządzeń, to można go traktować jak jeden wirtualny przyrząd z wieloma w pełni synchronizowanymi wejściami pomiarowymi. Ma to kolosalne znaczenie w ustalaniu zależności czasowych wszystkich badanych parametrów niezależnie od ich rodzaju. Wyobraźmy sobie na przykład analizę pracy różnych podzespołów samochodu, zarówno mechanicznych, jak i elektronicznych. Wyposażamy więc nasz pojazd we wszelkiego rodzaju czujniki (tensometry, akcelerometry, żyroskopy, czujniki ciśnienia, itp.). Pozwolą one obserwować reakcję pojazdu na zdarzenia występujące podczas testu. Wszystkie uzyskane z nich informacje uzupełniamy o równolegle dokonywane odczyty z GPS-u, synchronizowanej kamery CCD, dodajemy też parametry odczytywane z komputera pokładowego za pośrednictwem interfejsu CAN.
Następnie tak oczujnikowany samochód wyjeżdża na trasę, na której badane są reakcje na przyspieszenia, hamowania, poślizgi, nagłe zakręty, wyboje na drodze itd. Po odpowiednim do potrzeb skonfigurowaniu rejestratora zapisuje on w czasie jazdy testowej wszystkie interesujące nas parametry. Mogą być one analizowane już w czasie wykonywania testu, bezpośrednio po pomiarze, ale ponieważ dane są rejestrowane, często dokładna analiza jest powadzona w warunkach laboratoryjnych. Przykładowo, na podstawie obrazu z kamery można obserwować odkształcenia sprężyny amortyzatora, a z zamontowanych na niej tensometrów i akcelerometrów odczytujemy wartości sił i wibracji – synchronicznie z obrazem wideo. Przykład takiego testu, w którym mierzono prędkość samochodu, obroty silnika, wychylenie pedału przyspieszenia i trajektorię jazdy przedstawiono na rys. 2.
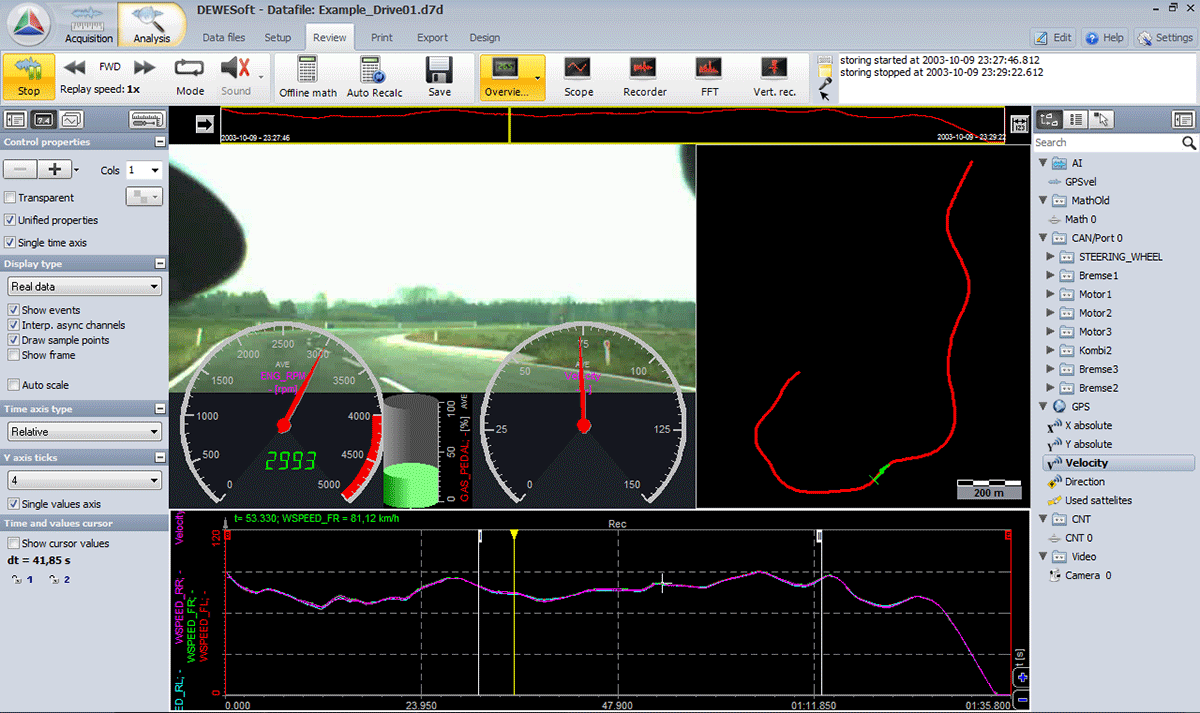
Rys. 2. Pomiar wybranych parametrów samochodu podczas jazdy testowej
Moduły zawierają odpowiednie dla realizowanych pomiarów bloki funkcjonalne. Przykład analogowego toru pomiarowego przedstawiono na rys. 3, w tab. 1 zestawiono natomiast parametry wymiennych modułów pomiarowych. W grupie „analogowej” znajdują się moduły zawierające wejścia przystosowane do źródeł napięciowych, prądowych, mostków, czujników piezoelektrycznych, czujników RTD, potencjometrów. Są też moduły współpracujące z tzw. superlicznikami (SuperCounter). Jest to zastrzeżona nazwa przypisana do specjalnego rodzaju wejść pomiarowych. Szczególnie ważnymi parametrami dla użytkownika jest dopuszczalna szybkość próbkowania i rozdzielczość przetwarzania analogowo-cyfrowego. Jak widać szybkości próbkowania są równe od 204,8 kSa/s do 2 MSa/s w każdym kanale. Większość modułów zapewnia izolację galwaniczną wejść.
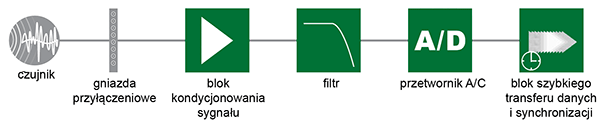
Rys. 3. Analogowy tor pomiarowy Modułowego Systemu Akwizycji Danych DEWE2-A4
Tab. 1. Zestawienie parametrów modułów pomiarowych Modułowego Systemu Akwizycji Danych DEWE2-A4
| Typ modułu | Rodzaje interfejsów wejściowych | Liczba kanałów | Szybkość próbkowania (w każdym kanale) | Rozdzielczość | Izolacja | Typ gniazd |
| Moduły analogowe | ||||||
| TRION-2402-dSTG | M, IEPE, V10, I, RTD, P | 6…8 | 204,8 kSa/s | 24 bity | nie | RJ-45, DSUB, LEMO 1B |
| TRION-2402-dACC | IEPE, V100, I, CNT, RTD, P | 6…8 | 204,8 kSa/s | 24 bity | nie | SMB, BNC |
| TRION-1620-ACC | V100, I, IEPE, CNT | 6 | 2 MSa/s 1 MSa/s | 16 bitów 24 bity | tak | BNC |
| TRION-1620-LV | V100, I | 6 | 2 MSa/s 1 MSa/s | 16 bitów 24 bity | tak | BNC |
| TRION-2402-V | V1000, I | 4 lub 8 | 204,8 kSa/s | 24 bity | tak | bezpieczne gniazdo bananowe |
| TRION-1603-LV | V100, I | 6 | 250 kSa/s | 16 bitów | tak | BNC |
| Moduły cyfrowe | ||||||
| TRION-CNT | CNT, WEC | 6…8 | 800 kSa/s | 80 MHz | tak | DI, CNT |
| TRION-DIO-4800 | WEC | 48 | 2 MSa/s | 80 MHz | tak | DI |
| TRION-BASE | CNT, WEWYC | 1…8 | 2 MSa/s | 80 MHz | – | DI, DIO, CNT, SYNC, AUX |
| TRION-TIMING | CNT, WEWYC, Z, GPS | 1…8 | 2 MSa/s | 80 MHz | – | antena GPS, we/wy IRIG, DIO, CNT, SYNC, AUX |
| Moduły dedykowane | ||||||
| TRION-CAN | CAN | 2 lub 4 | tak | DSUB, | ||
| TRION-FLEXRAY | F | 1 | – | DSUB | ||
| TRION-VGPS | CNT, WEWYC, Z, GPS | 1 CNT 8 DIO | 2 MSa/s | 0,01 km/h <10 cm | – | Antena GPS, we/wy IRIG, DIO, CNT, SYNC, OUT |
| TRION-A429 | A | 4, 8, 16 lub 30 | – | SCSI-3 | ||
| TRION-M1553 | MI | 1, 2, 4 | – | SCSI-3 | ||
| TRION-MA4 | A, MI | 9, 10, 12 lub 13 | – | SCSI-3 | ||
| TRION-1628-AO-2 | WYA | Szybkość odświeżania max 2,8 MSa/s | 2 | 16 bitów | – | BNC |
Objaśnienia: M – mostek, IEPE – czujniki piezoelektryczne, V – czujniki napięciowe (napięcie maksymalne), I – czujniki prądowe, RTD – czujniki RTD, P – potencjometr, CNT – wejście Counter z opcją SuperCounter, WEC –wejścia cyfrowe, WEWYC – wejścia wyjścia cyfrowe, Z – wejścia zegarowe, GPS – wejście dla GPS, CAN – interfejs CAN, F – interfejs Flexray, A – interfejs ARINC 429, MI – interfejs MIL-STD-1553, WYA – wyjścia analogowe
Grupa „cyfrowa” zawiera moduły współpracujące ze źródłami sygnału cyfrowego, a także moduł taktujący i synchronizujący. Moduły te są dobierane w zależności od wykorzystywanych interfejsów cyfrowych. Na przykład moduł TRION CAN umożliwia zbieranie danych za pośrednictwem interfejsu CAN. Odpowiednio dla interfejsów ARINC429 czy MIL-STD-1553 powinny być stosowane moduły TRION-A429, TRION-M1553 lub TRION MA4. Ten ostatni wykorzystuje zarówno interfejs ARINC 429, jak i MIL-STD-1553. Moduły te są przeznaczone do pomiarów w bardzo wymagających aplikacjach dla motoryzacji, lotnictwa, sprzętu wojskowego itp.
Do rejestratora DEWE2-A4 może być ponadto dołączany moduł wyjściowy (TRION-1628-AQ-2) umożliwiający sterowanie urządzeniami zewnętrznymi. Zawiera on dwa wyjścia analogowe o 16-bitowej rozdzielczości pracujące w zakresie ±5 V lub ±10 V.
 Fotowoltaika perowskitowa: od wydajności laboratoryjnej do masowej komercjalizacji
Fotowoltaika perowskitowa: od wydajności laboratoryjnej do masowej komercjalizacji  Czy kamery termowizyjne pokazują nam całą prawdę?
Czy kamery termowizyjne pokazują nam całą prawdę?  Generowanie ujemnego napięcia odniesienia – eksperymenty z zestawem ADALM2000
Generowanie ujemnego napięcia odniesienia – eksperymenty z zestawem ADALM2000 

![O konkursie organizowanym przez firmę TRUMPF Huettinger i polskie uczelnie techniczne opowiada Alicja Peresada i prof. Jacek Rąbkowski oraz kilkoro nagrodzonych dyplomantów: mgr inż. Jakub Dobosz, inż. Maja Zielińska, dr inż. Jakub Kołodziej, dr inż Weronika Hryniewska-Guzik i dr inż. Grzegorz Bartyzel. Zapraszamy do obejrzenia filmu! [materiał redakcyjny]](https://mikrokontroler.pl/wp-content/uploads/2026/07/TRUMPF-czolowka.png "https://www.youtube.com/watch?v=XkeyLmtLfxo")



