





STM32Duino: Arduino dla STM32 (cz. 3)
W poprzednich artykułach (część 1, część 2) o STM32duino pokazaliśmy jak skonfigurować środowisko programistyczne Arduino do pracy z mikrokontrolerami STM32 oraz jak zrealizować aplikację używającą portów wejścia/wyjścia. W tej części kontynuujemy wątek aplikacyjny, demonstrując sposób wykorzystania kolejnego zasobu: interfejsu szeregowego UART.
Kurs STM32Duino został podzielony na następujące części:
- STM32Duino: Arduino dla STM32 (cz. 1) – wstęp, opis platform Arduino i STM32
- STM32Duino: Arduino dla STM32 (cz. 2) – porty wejścia/wyjścia
- STM32Duino: Arduino dla STM32 (cz. 3) – interfejs szeregowy UART (właśnie czytasz ten artykuł)
- STM32Duino: Arduino dla STM32 (cz. 4) – przetwornik A/C
- STM32Duino: Arduino dla STM32 (cz. 5) – timery, PWM
- STM32Duino: Arduino dla STM32 (cz. 6) – przykłady aplikacji na zestawie STM32L4 Discovery kit IoT node
Arduino i STM32 (STM32duino) – przygotowanie do pracy
Pracę należy rozpocząć uruchamiając środowisko programistyczne STM32duino. Przygotowanie do pisania kodu obejmuje kilka prostych kroków.
Po pierwsze konieczne jest stworzenie nowego projektu (zwanego sketchem w Arduino), dlatego użytkownik powinien wybirać z menu głównego środowiska programistycznego kolejno File i New (skrót klawiaturowy CTRL+N).
W następnym kroku należy wskazać używaną platformę sprzętową. Przykładowo autor wybrał płytkę NUCLEO-L476RG z 64-pinowym układem STM32L476RG. W tym celu należy ponownie użyć menu głównego środowiska programistycznego. Wybór platformy przebiega w dwóch etapach. Najpierw klikając Tools i Board wybrać należy Nucleo-64.
Następnie wybierając Tools i Board Part Number wybrać należy NUCLEO-L476.
W ostatnim kroku należy zapisać projekt na dysku twardym. Jednocześnie warto zmienić nazwę projektu na bardziej intuicyjną, gdyż domyślna nazwa zawiera tylko słowo sketch oraz nazwę aktualnego miesiąca i dnia. Chcąc zapisać projekt oraz zmienić jego nazwę użytkownik znowu korzysta z menu głównego środowiska programistycznego wybierając kolejno File i Save as… (skrót klawiaturowy CTRL+Shift+S).
W ten sposób otworzone zostanie okno, które pozwoli na wybranie ścieżki na dysku twardym, pod którą zapisany zostanie projekt. Jednocześnie okno pozwala na wpisanie nowej nazwy projektu.
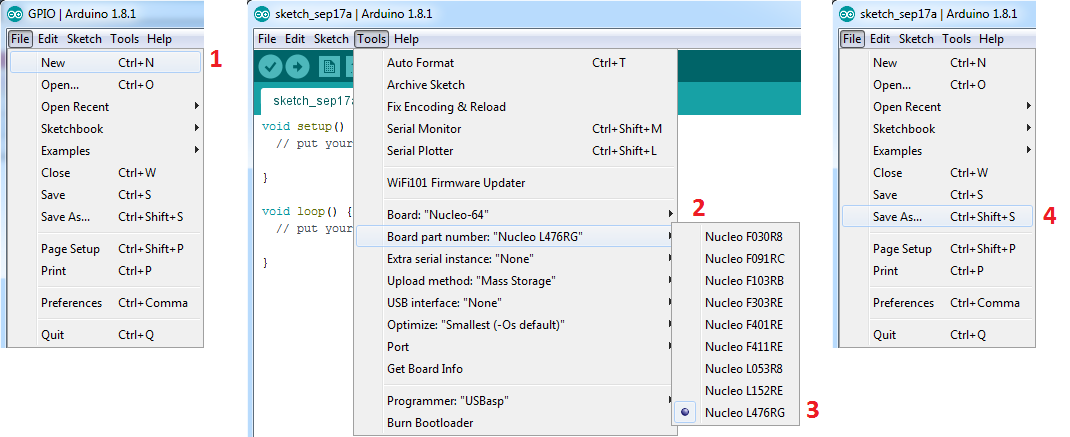
Rys. 1. Kolejne kroki przygotowania środowiska Arduino do pisania kodu dla wybranej platformy z układem STM32
Arduino i STM32 (STM32duino) – struktura kodu
Każdy stworzony od nowa projekt (sketch) zawiera domyślnie kilka linii kodu tworzących szkielet aplikacji. Kod ten pokazano w listingu 1.
Składa się on z dwóch funkcji:
- Pierwsza funkcja nosi nazwę setup. Jej przeznaczenie można łatwo rozszyfrować zapoznając się z komentarzem. Programista umieszcza w niej kod, który ma zostać wykonany tylko raz, na początku aplikacji, a więc po doprowadzeniu napięcia zasilania do mikrokontrolera. Są to głównie funkcje konfigurujące peryferia mikrokontrolera (np. ustawiające parametry przetwornika A/C lub interfejsu UART) lub inicjujące podzespoły zewnętrzne (np. moduł Bluetooth).
- Druga funkcja otrzymała nazwę loop. Ponownie w rozszyfrowaniu jej przeznaczenia pomaga komentarz. Jest to nieskończona pętla, w której programista umieszcza funkcje wykonywane cyklicznie (np. odczyt stanu przycisku lub odebranie danych z czujnika).
Zatem programista tworzy kod aplikacji uzupełniając ciała funkcji setup i loop o dodatkowy kod języka Arduino. Kod ten składa się z typowych elementów języka programowania takich jak zmienne, funkcje, instrukcje warunkowe czy też operacje matematyczne.
Listing 1. Kod nowego projektu w środowisku programistycznym STM32duino
void setup() {
// put your setup code here, to run once:
}
void loop() {
// put your main code here, to run repeatedly:
}
Interfejs szeregowy UART – podstawowe informacje
Mając skonfigurowane środowisko programistyczne STM32duino oraz znając podstawy programowania Arduino można przejść do kolejnego poziomu wtajemniczenia, jakim jest zrozumienie podstaw dotyczących interfejsu komunikacyjnego UART.
Podstawowym zasobem służącym mikrokontrolerowi do komunikacji ze światem zewnętrznym są porty wejścia/wyjścia. Sterowanie portami przez programistę z poziomu aplikacji dobrze sprawdza się w sytuacji, gdy komunikacja sprowadza się do wytwarzania i odczytywania pojedynczych stanów logicznych. W praktyce jednak wiele układów współtworzących system elektroniczny komunikuje się przez sekwencje bitów.
Interfejs szeregowy UART – sposoby realizacji transmisji
Rozróżnia się dwa modele takiej komunikacji: transmisję szeregową (bity przesyłane są jeden po drugim przez jedną lub kilka linii sygnałowych) i transmisję równoległą (każdy bit słowa przesyłany jest przez oddzielną linię sygnałową).
Realizacja takiej transmisji za pomocą portów w trybie GPIO nie jest optymalnym rozwiązaniem. Po pierwsze dlatego, że wiąże się to z określoną pracą implementacyjną, którą musi wykonać programista (mniej lub bardziej czasochłonną w zależności od poziomu skomplikowania transmisji). Po drugie w przypadku gdy aplikacja wymaga od mikrokontrolera częstego komunikowania się z układem lub układami, transmisja danych może okazać się niezbyt efektywna z punktu widzenia czasu wykonania (powód: implementacja ma charakter programowy, nie sprzętowy).
Aby rozwiązać przedstawione problemy powszechnym rozwiązaniem stało się integrowanie w mikrokontrolerach kontrolerów odpowiedzialnych za sprzętową realizację komunikacji. Najpopularniejsze interfejsy komunikacyjne to I2C, SPI oraz będący przedmiotem tego artykułu UART.
Interfejs szeregowy UART – wersja sprzętowa
W warstwie fizycznej komunikacja UART realizowana jest przy użyciu dwóch linii o nazwie TXD i RXD. Każda z nich przewidziana jest do jednokierunkowego przesyłania danych: TXD jest wyjściem nadajnika, a RXD jest wejściem odbiornika. UART w podstawowej formie jest komunikacją asynchroniczną, a więc linia z sygnałem zegarowym nie jest używana. Jednak w szczególnych przypadkach UART może wykorzystywać linię zegarową i wtedy ma miejsce komunikacja synchroniczna (USART). Ponadto UART jest komunikacją typu punkt-punkt, co oznacza, że przy użyciu jednego łącza mogą komunikować się tylko dwa układy.
Schemat połączenia elektrycznego właściwego dla transmisji UART pokazano na rysunku 2.

Rys. 2. Schemat połączenia dwóch układów komunikujących się poprzez interfejs UART
Dane interfejs UART przesyła zgodnie ze schematem przedstawionym na rysunku 3. Kolejno wyróżnić można: sygnalizujący rozpoczęcie ramki bit startu o stanie niskim, od 5 do 8 bitów danych, opcjonalny bit parzystości służący do sprawdzenia poprawności danych oraz sygnalizujący zakończenie ramki bit (1, 1,5 lub 2) stopu o stanie wysokim.

Rys. 3. Format komunikacji w interfejsie UART
Popularnymi podzespołami używającymi interfejsu UART są moduły Bluetooth, GSM i GPS. Warto pamiętać, że zastosowanie transmisji UART nie ogranicza się tylko do komunikacji mikrokontrolera z komponentami otaczającymi go w systemie. Rozwiązanie to stanowi również podstawę standardów komunikacji między urządzeniami:
- standardu komputerowego RS-232 i
- sieciowych standardów przemysłowych RS-422 i RS-485 o topologii magistrali.
Interfejs szeregowy UART – funkcje Arduino
Do sterowania interfejsem UART w Arduino wystarczy znajomość kilku funkcji. Nazywają się one następująco: Serial.begin, Serial.println, Serial.available oraz Serial.readStringUntil.
Funkcja Serial.begin odpowiada za skonfigurowanie interfejsu UART. Funkcja ta ma jeden argument, jakim jest prędkość transmisji (baudrate). Warto w tym miejscu wspomnieć, że funkcja Serial.begin nie daje użytkownikowi możliwości wyboru który z interfejsów UART mikrokontrolera będzie wykorzystany. Wynika to z tego, że w Arduino przewidziano wykorzystanie tylko jednego interfejsu UART.
Funkcja Serial.println pozwala na wysłanie treści interfejsem UART. Funkcja ta przyjmuje jeden argument, który jest właśnie wspomnianą treścią. Treść najpierw przekazujemy do nadajnika kontrolera UART, a następnie wysyłamy linią nadawczą TXD. Co istotne, argumentem funkcji Serial.println może być zarówno ciąg znaków ASCII podany wprost, jak również zawartość wcześniej zdefiniowanej zmiennej bądź też tablicy.
Z kolei funkcja Serial.available służy do sprawdzania czy odbiornik interfejsu UART dysponuje nową treścią. Funkcja ta nie przyjmuje żadnego argumentu, za to wartością przez nią zwracaną jest liczba otrzymanych przez odbiornik bajtów treści. Dalej: funkcja Serial.readStringUntil daje możliwość odczytania treści przechowywanej przez odbiornik interfejsu UART. Funkcja zwraca odebraną treść kończąc na znaku, który podany jest jako argument funkcji (tak zwany terminator).
Interfejs szeregowy UART – przykładowa aplikacja
Płytka NUCLEO-L476RG dysponuje programatorem/debugerem ST-Link. Jego dodatkową funkcją jest pełnienie roli mostu pomiędzy interfejsem UART i interfejsem USB emulującym port COM. Dzięki takiemu rozwiązaniu aplikacja mikrokontrolera może komunikować się poprzez interfejs UART z terminalem komputerowym. Po stronie mikrokontrolera transmisja realizowana jest przez porty PA2 (USART2_TX) i PA3 (USART2_RX). Odpowiedni schemat pokazano na rysunku 4.
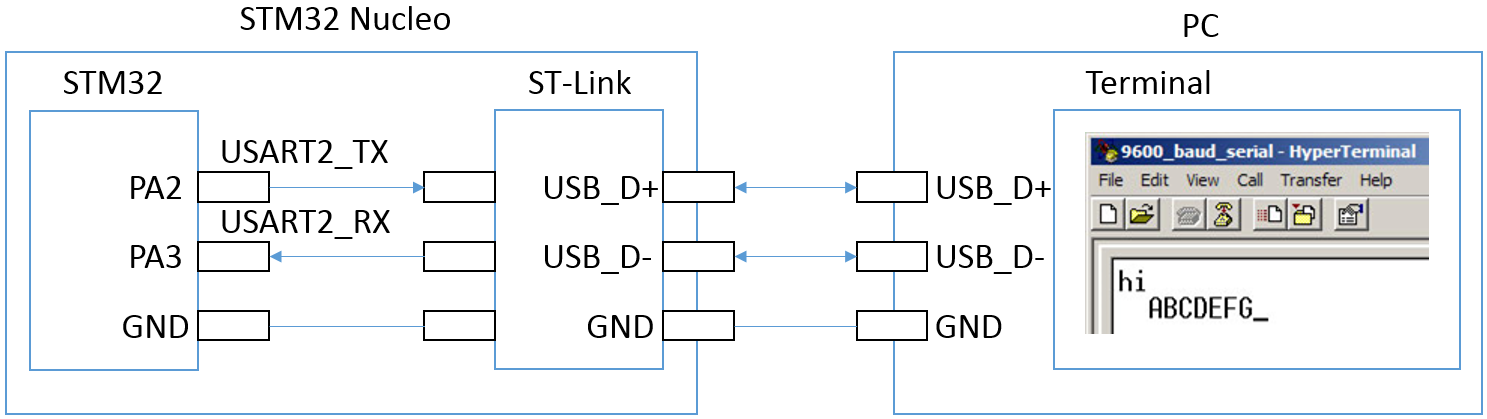
Rys. 4. Schemat blokowy do komunikacji szeregowej na płytce NUCLEO-L476RG
Po zapoznaniu się z funkcjami Arduino do obsługi interfejsu szeregowego UART i przeanalizowaniu schematu połączenia interfejsu szeregowego, jesteśmy gotowi do napisania programu realizującego dwukierunkową transmisję danych.
Zaprezentowany na listingu 2 kod zawiera kolejno:
- przed funkcją setup: deklarację łańcucha znaków Data,
- wewnątrz funkcji setup: wywołanie funkcji Serial.begin ustawiającej prędkość transmisji interfejsu UART,
- wewnątrz funkcji loop:
- użycie instrukcji warunkowej, która poprzez wywołanie funkcji Serial.available sprawdza czy odbiornik interfejsu UART dysponuje nową treścią,
- w przypadku informacji o odebraniu nowych danych:
- wywołanie funkcji Serial.readStringUntil odczytującej treść z odbiornika interfejsu UART i zapisującej ją w łańcuchu znaków Data,
- wywołanie funkcji Serial.println, która wysyła do komputera prostą wiadomość tekstową oraz odsyła odebraną wcześniej treść.
Po napisaniu kodu program należy skompilować wybierając przycisk Verify (skrót klawiaturowy CTRL+R). Po zakończeniu kompilacji należy wgrać program do pamięci mikrokontrolera wybierając przycisk Upload (skrót klawiaturowy CTRL+U).
Listing 3. Kod programu realizującego dwukierunkową transmisję danych przez interfejs UART
String Data = "";
void setup() {
// put your setup code here, to run once:
Serial.begin(9600);
}
void loop()
{
// put your main code here, to run repeatedly:
if(Serial.available() > 0)
{
Data = Serial.readStringUntil('\n');
Serial.println("STM32 odebral: " + Data);
}
}
Działanie przykładowej aplikacji
W efekcie działania tej aplikacji każdorazowo po wysłaniu z terminala komputerowego treści zakończonej znakiem nowej linii. Mikrokontroler odsyła tę treść z powrotem do terminala dodając informację, że treść ta pochodzi od układu STM32.
Działanie aplikacji można obserwować z poziomu środowiska programistycznego Arduino IDE. Dysponuje ono wbudowanym terminalem komputerowym portu COM. Można go włączyć z poziomu menu głównego wybierając kolejno Tools i Serial Monitor (skrót klawiaturowy CTRL+Shift+M). Kolejne kroki pracy z aplikacją pokazano na rysunku 5.
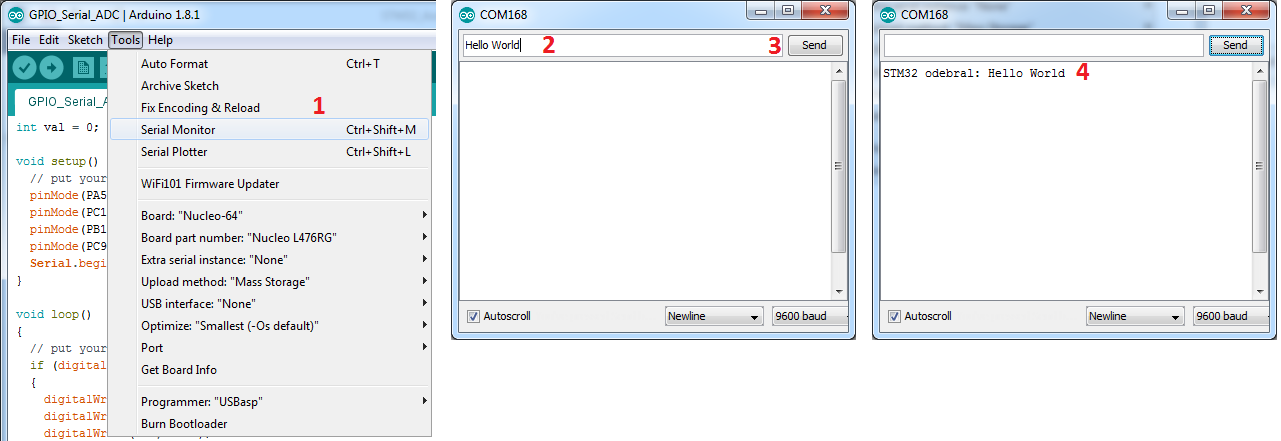
Rys. 5. Praca z aplikacją realizującą komunikację UART
Podsumowanie
Trzeci artykuł z cyklu traktującego o STM32duino (Arduino dla STM32) kontynuuje wątek aplikacyjny, koncentrując się na interfejsie szeregowym UART. W materiale zaprezentowano sposób konfiguracji interfejsu (ustawienie prędkości transmisji) oraz przedstawiono jak wysyłać i odbierać dane.
Kolejne artykuły rozwijać będą aspekt prostych aplikacji korzystających z zasobów mikrokontrolera. Tematyka obejmować będzie przetwornik A/C (aplikacja: odczytywanie napięcia na pinie mikrokontrolera) oraz Timer (wytwarzanie na pinie sygnału PWM).
 Grzegorz Kamiński: Dlaczego powstały tranzystory FinFET i GAAFET?
Grzegorz Kamiński: Dlaczego powstały tranzystory FinFET i GAAFET?  Google stawia na fuzję jądrową. AI potrzebuje coraz więcej energii
Google stawia na fuzję jądrową. AI potrzebuje coraz więcej energii  Fotowoltaika perowskitowa: od wydajności laboratoryjnej do masowej komercjalizacji
Fotowoltaika perowskitowa: od wydajności laboratoryjnej do masowej komercjalizacji 

![O konkursie organizowanym przez firmę TRUMPF Huettinger i polskie uczelnie techniczne opowiada Alicja Peresada i prof. Jacek Rąbkowski oraz kilkoro nagrodzonych dyplomantów: mgr inż. Jakub Dobosz, inż. Maja Zielińska, dr inż. Jakub Kołodziej, dr inż Weronika Hryniewska-Guzik i dr inż. Grzegorz Bartyzel. Zapraszamy do obejrzenia filmu! [materiał redakcyjny]](https://mikrokontroler.pl/wp-content/uploads/2026/07/TRUMPF-czolowka.png "https://www.youtube.com/watch?v=XkeyLmtLfxo")



