





SEGGER Embedded Studio + ekosystem – z myślą o STM32 (cz.1)
W artykule przedstawiamy nowe na naszym rynku środowisko programistyczne Segger Embedded Studio, dostępne także dla fanów mikrokontrolerów STM32.
Wybór środowiska programistycznego jest niezwykle istotną decyzją, którą musi podjąć programista za każdym razem, kiedy rozpoczyna nowy projekt. Decyzja ta obejmuje zarówno IDE, w którym będzie tworzony kod, jak i biblioteki umożliwiające przetwarzanie danych, tworzenie interfejsu użytkownika, a także zawierające stosy komunikacyjne i systemy operacyjne czasu rzeczywistego. W niniejszym artykule zostaną przedstawione rozwiązania dostarczane przez firmę SEGGER w postaci środowiska Embedded Studio, oraz możliwych do użycia bibliotek.
Jako przykład posłuży projekt prostego oscyloskopu, przygotowany dla zestawu STM32F746G-DISCO, przeniesiony ze środowiska SW4STM32 i systemu FreeRTOS. Zarówno SEGGER Embedded Studio, jak i opisywane komponenty są dostępne bezpłatnie do zastosowań niekomercyjnych.

SEGGER Evaluation Software dla STM32F746G-DISCO
Pracę z narzędziami firmy SEGGER warto zacząć od pobrania pakietu bibliotek wraz z przykładami skonfigurowanymi dla jednego z dostępnych zestawów ewaluacyjnych. Listę wspieranych modułów można znaleźć na stronie segger.com/evaluate-our-software/. Znajduje się tam między innymi pakiet dla STM32F746G-Discovery od ST, wraz z bibliotekami wymienionymi w tabeli 1.
Tab. 1. Komponenty dostępne w pakiecie ewaluacyjnym dla STM32F746G-Discovery
| embOS | System operacyjny czasu rzeczywistego. |
| embOS/IP | Stos IP zawierający między innymi DHCP, FTP, CoAP, SMTP. |
| emCompress | Algorytmy kompresji danych. |
| emCrypt | Algorytmy kryptograficzne, m.in. AES, DES, 3DES, MD5, SHA. |
| emFile | System plików z szyfrowaniem dla pamięci NAND, NOR oraz kard SD. |
| emModbus | Stos Modbus. |
| emSecure | Tworzenie i weryfikacja podpisów cyfrowych. |
| emUSB Device | Stos USB-Device. |
| emUSB Host | Stos USB-Host. |
| emWeb | Serwer sieciowy z obsługą m. in. WebSocket, REST, SSE. |
| emWin | Graficzne interfejsy użytkownika z obsługą paneli dotykowych. |
Komponenty dostępne w pakiecie są w postaci skompilowanych bibliotek i mogą być używane bezpłatnie w projektach niekomercyjnych, natomiast kody źródłowe są udostępniane w wersjach płatnych charakteryzujących się także rozszerzoną funkcjonalnością. Szczegóły dotyczące cen oraz dokładnej funkcjonalności poszczególnych bibliotek dostępne są na stronie producenta – segger.com.
SEGGER Embedded Studio
Kolejnym narzędziem udostępnionym przez firmę SEGGER jest środowisko Segger Embedded Studio przeznaczone dla systemów Windows, Linux i macOS. Umożliwia ono zarządzanie projektem, kompilację oraz debugowanie kodu, a przy tym jest dostępne bezpłatnie dla zastosowań niekomercyjnych. Pracę można rozpocząć od jednego z przykładowych projektów dostępnych w pakiecie ewaluacyjnym, lub tworząc nowy projekt i dołączając do niego niezbędne komponenty. W niniejszym artykule zostanie przedstawiona druga z tych metod, przedstawiająca krok po kroku poszczególne etapy tworzenia projektu i budowania aplikacji dla zestawu STM32F746G-Discovery.
Nowy projekt
Po uruchomieniu SEGGER Embedded Studio tworzymy nowy projekt (File→New Project) i wybieramy opcję A C/C++ executable for a Cortex-M processor. W kolejnym oknie konfiguratora wybieramy mikrokontroler STM32F746NG, a jako interfejs do debugowania – J-Link SWD. Następne okno pozwala dołączyć do projektu pliki startowe oraz oraz obsługę RTT (Real-Time Transfer), służącego do komunikacji z aplikacją za pośrednictwem debuggera. Na koniec można wybrać jeszcze dostępne konfiguracje projektu – Debug oraz Release i zakończyć pracę kreatora.
Jeżeli podczas konfiguracji w Segger Embedded Studio, do projektu zostały dodane wszystkie pliki, to możemy teraz zbudować i uruchomić przykładową aplikację wypisująca w terminalu debuggera napis Hello World. Kompilację możemy uruchomić wybierając opcję z menu Build, lub wciskając klawisz F7.
Po jej zakończeniu otrzymujemy informację o wykorzystaniu pamięci Flash i RAM przez utworzoną aplikację, co zostało pokazane na rysunku 1.
 Rys. 1. Wynik kompilacji z informacją o wykorzystanej pamięci (Segger Embedded Studio)
Rys. 1. Wynik kompilacji z informacją o wykorzystanej pamięci (Segger Embedded Studio)
Interfejs do programowania i debugowania
Przed uruchomieniem aplikacji na płytce STM32F746G-DISCO musimy się na chwilę zatrzymać i przygotować debugger, ponieważ środowisko Segger Embedded Studio współpracuje jedynie z interfejsami J-Link. Na szczęście istnieje możliwość zmiany firmware’u na wbudowanym w zestaw STM32F746G-DISCO interfejsie ST-Link, tak aby współpracował z naszym środowiskiem. Szczegółowe instrukcje dotyczące zmiany znajdują się na stronie firmy SEGGER: https://www.segger.com/products/debug-probes/j-link/models/other-j-links/st-link-on-board/, a cała operacja jest odwracalna. Niestety procedura zmiany oprogramowania interfejsu ST-Link może zostać przeprowadzona tylko na systemie Windows. Po przeprogramowaniu debuggera, możemy uruchomić skompilowaną wcześniej aplikację na zestawie STM32F746G-DISCO za pomocą opcji Debug→Go, lub klawisza F5. Podczas debugowania mamy dostęp m. in. do pracy krokowej, podglądu rejestrów, stosu wywołań i wartości zmiennych, tak jak na rysunku 2.
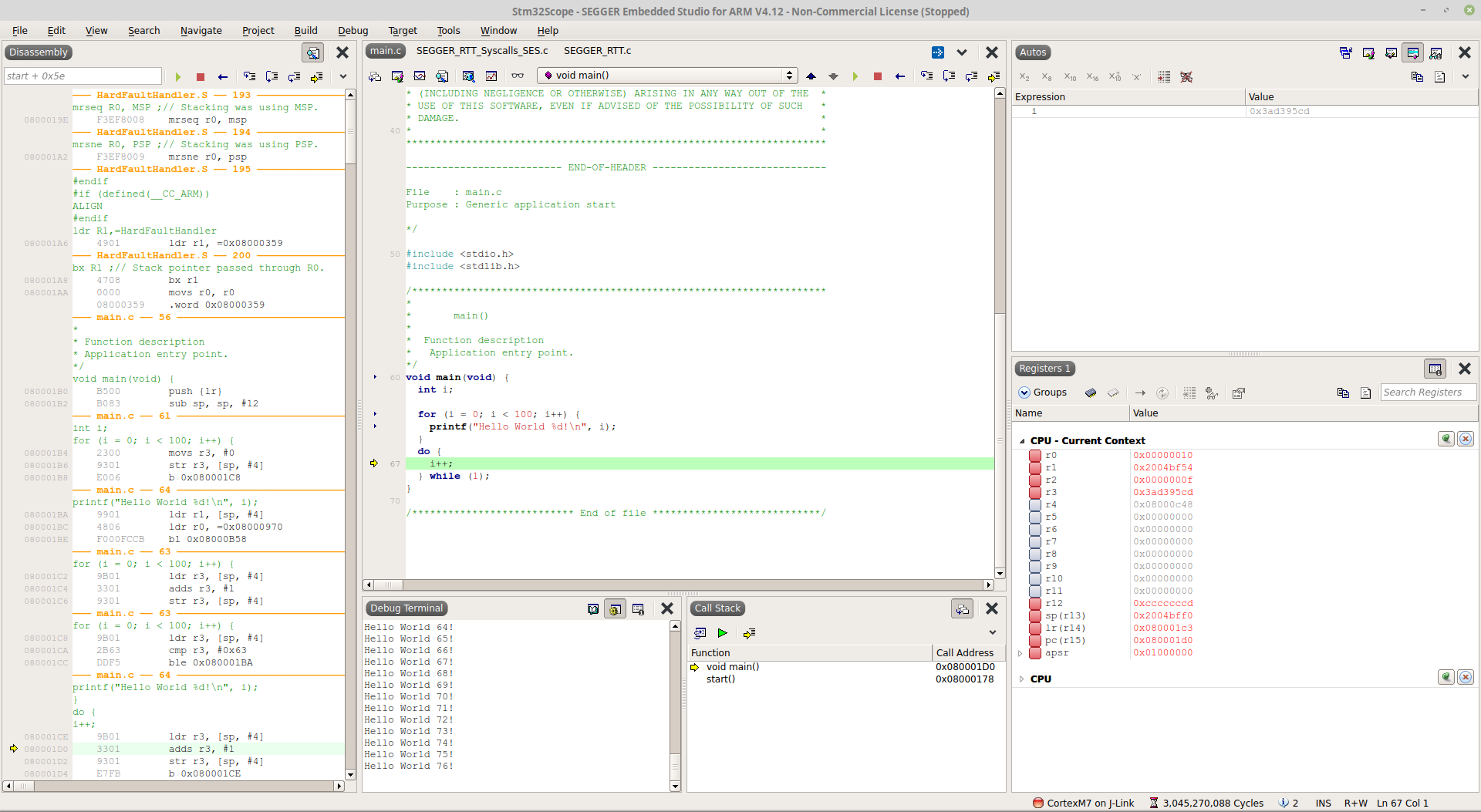 Rys. 2. Widok podczas debugowania projektu (Segger Embedded Studio)
Rys. 2. Widok podczas debugowania projektu (Segger Embedded Studio)
System operacyjny embOS
embOS jest systemem operacyjnym czasu rzeczywistego przeznaczonym do użycia w systemach wbudowanych. Obsługuje on wiele zadań, wykonując je według przydzielonych priorytetów. System implementuje opcjonalne wywłaszczanie oraz algorytm round-robin dla zadań o jednakowym priorytecie. Dla celów komunikacji i synchronizacji zostały w nim zaimplementowane takie mechanizmy jak semafory, kolejki, zdarzenia i skrzynki pocztowe. Wymagania dotyczące potrzebnej pamięci zależą od liczby użytych komponentów systemowych. Minimalny obraz systemu potrzebuje ok. 1700 bajtów pamięci Flash i ok. 70 bajtów pamięci RAM, natomiast dodatkowe wymagania pamięci RAM dla poszczególnych komponentów znajdują się w tabeli 2.
Tab. 2. Zużycie pamięci przez komponenty systemu
| Komponent | Zużycie pamięci |
| Zadanie (TCB, Task Control Block) | 36 |
| Licznik (Software timer) | 20 |
| Muteks (Mutex, Resource semaphore) | 16 |
| Semafor (Counting semaphore) | 8 |
| Skrzynka pocztowa (Mailbox) | 24 |
| Kolejka (Queue) | 32 |
| Zdarzenie (Event) | 12 |
Pliki krok-po-kroku
Skompilowane źródła systemu embOS oraz niezbędne nagłówki znajdują się w pakiecie ewaluacyjnym dla STM32F746G-DISCO, w katalogu OS. Katalog ten możemy skopiować do utworzonego projektu i dodać bibliotekę do kompilacji. W tym celu musimy kliknąć prawym przyciskiem myszy na nazwę projektu i wybrać opcję Add Existing File…
W wersji ewaluacyjnej, mamy dostęp jedynie do trzech skompilowanych wersji embOS:
- release, ze sprawdzaniem stosu i profilowaniem,
- „czysta” release,
- debug z profilowaniem.
Do przykładu została wybrana wersja libos_v7m_t_vfpv4_le_dp.a, skompilowana z flagą kompilatora DEBUG=1. Wybrana biblioteka musi być także zaznaczona w pliku OS_Config.h, poprzez zdefiniowanie odpowiednio OS_LIBMODE_SP, OS_LIBMODE_R, lub OS_LIBMODE_DP. Oprócz samej biblioteki, do projektu trzeba także dodać ścieżkę do plików nagłówkowych: ./OS/Inc, klikając prawym przyciskiem myszy na nazwę projektu w oknie Project Explorer, wybierając opcję Options… i modyfikując pole Preprocessor→User Include Directories.
Oprócz biblioteki embOS i jej nagłówków musimy dodać do projektu kilka innych plików znajdujących się w pakiecie ewaluacyjnym SEGGER’a i w bibliotece STM32Cube. Potrzebne pliki i katalogi zostały zamieszczone w tabeli 3.
Zarządzanie plikami
W tym miejscu warto wspomnieć o zarządzaniu plikami w środowisku Embedded Studio. Wszystkie pliki dodane do projektu są wyświetlane po lewej stronie, w oknie nazwanym Project Explorer. Dodatkowo, ścieżki plików w projekcie nie muszą odpowiadać lokalizacji plików na dysku, dzięki czemu możemy dowolnie grupować źródła znajdujące się bezpośrednio w katalogu projektu, jak i poza nim. W prezentowanym przykładzie wszystkie niezbędne pliki zostały skopiowane do katalogu projektu, tak aby po rozpakowaniu można go było zbudować bez dodatkowych zależności.
Tab. 3. Pliki potrzebne do uruchomienia przykładu dla systemu embOS
| SEGGER Evaluation Software |
| SEGGER/Global.h |
| SEGGER/SEGGER.h |
| SEGGER/SEGGER_SYSVIEW.c |
| SEGGER/SEGGER_SYSVIEW.h |
| SEGGER/SEGGER_SYSVIEW_ConfDefaults.h |
| SEGGER/SEGGER_SYSVIEW_embOS.c |
| SEGGER/SEGGER_SYSVIEW_embOS.h |
| SEGGER/SEGGER_SYSVIEW_Int.h |
| BSP/ST/STM32F746_STM32F746G_Discovery/Setup/JLINKMEM_Process.c |
| BSP/ST/STM32F746_STM32F746G_Discovery/Setup/OS_Error.c |
| BSP/ST/STM32F746_STM32F746G_Discovery/Setup/RTOSInit_STM32F7xx.c |
| BSP/ST/STM32F746_STM32F746G_Discovery/Setup/SEGGER_SYSVIEW_Conf.h |
| BSP/ST/STM32F746_STM32F746G_Discovery/Setup/SEGGER_SYSVIEW_Config_embOS.c |
| STM32Cube_FW_F7 |
| Drivers/CMSIS/Device/ST/STM32F7xx/Include |
| Drivers/CMSIS/Include |
| Projects/STM32746G-Discovery/Templates/Src/system_stm32f7xx.c |
Podobnie jak w przypadku biblioteki embOS, wszystkie pliki źródłowe z tabeli 3 musimy dodać do projektu korzystając z opcji Add Existing File, natomiast ścieżki do lokalizacji plików nagłówkowych powinny znaleźć się w ustawieniach projektu, w polu User Include Directories. Przykładowa konfiguracja została przedstawiona na rysunkach 3 i 4.
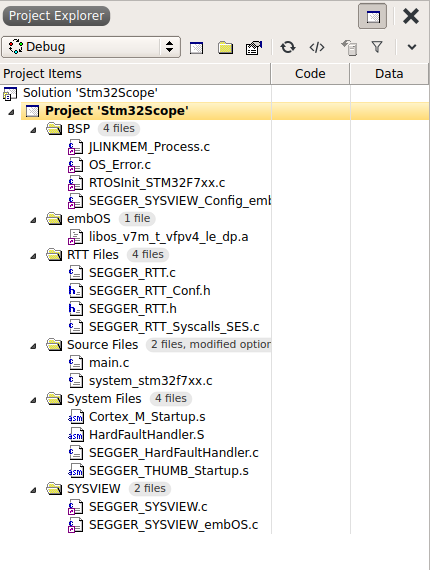 Rys. 3. Przykładowe pliki dodane do projektu
Rys. 3. Przykładowe pliki dodane do projektu
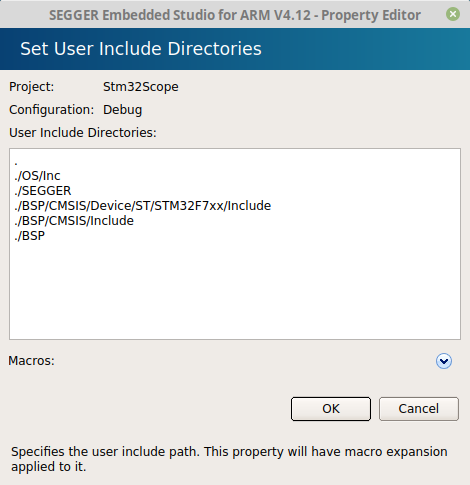 Rys. 4. Konfiguracja ścieżek dla plików nagłówkowych (Segger Embedded Studio)
Rys. 4. Konfiguracja ścieżek dla plików nagłówkowych (Segger Embedded Studio)
Po dodaniu wszystkich ścieżek i źródeł do projektu w Segger Embedded Studio musimy jeszcze zdefiniować symbol STM32F746xx dla biblioteki CMSIS. Możemy to zrobić w ustawieniach projektu w polu Preprocessor→Preprocessor Definitions.
Przykład
W tym momencie mamy już wszystko potrzebne do uruchomienia prostego przykładu, którego kod źródłowy został przedstawiony na listingu 1. Konfiguracja systemu w funkcji main wykorzystuje funkcje zdefiniowane w dodanych do projektu plikach z pakietu Evaluation Software, a następnie tworzy pojedyncze zadanie. Na koniec wywoływana jest funkcja OS_Start, która uruchamia systemowego planistę odpowiedzialnego za uruchamianie zadań. Jedyne zadanie w przykładzie wypisuje w pętli „Hello Test Task!” na terminal debuggera. Funkcja OS_Delay realizuje opóźnienie zależnie od konfiguracji zegara systemowego, którego okres w przykładzie wynosi 1 ms.
Warto także zwrócić uwagę na sposób tworzenia zadań za pomocą makra OS_CREATETASK. Przyjmuje ono wskaźnik do struktury OS_TASK, nazwę zadania, wskaźnik na funkcję implementującą zadanie, priorytet oraz wskaźnik na stos. Istotne jest, aby ten ostatni był dostatecznie duży, ponieważ to z niego będzie korzystało zadanie podczas wykonywania. Możemy teraz skompilować przykład i uruchomić go na płytce STM32F746G-DISCO.
List. 1. Przykładowy kod korzystający z biblioteki embOS
#include <stdio.h>
#include <stdlib.h>
#include "stm32f746xx.h"
#include "RTOS.h"
static OS_TASK testTaskId;
static OS_STACKPTR int testTaskStack[2048];
static void testTask(void) {
while(1) {
printf("Hello Test Task!\n");
OS_Delay(1000);
}
}
void main(void) {
OS_InitKern();
OS_InitHW();
OS_CREATETASK(&testTaskId, "TestTask", testTask, 150, testTaskStack);
OS_Start();
}
Zadania i zajętość pamięci
Na koniec tego rozdziału zobaczymy jeszcze w jaki sposób można zdobyć informację o zdefiniowanych zadaniach i wykorzystywanej przez nie pamięci w Segger Embedded Studio. Do tego celu potrzebujemy skryptu embOSPluginSES.js, znajdującego się w katalogu BSP/ST/STM32F746_STM32F746G_Discovery/Setup w pakiecie ewaluacyjnym. Ścieżkę do niego musimy podać w opcjach projektu, w polu Debugger→Threads Script File (w przykładzie jest to $(ProjectDir)/embOSPluginSES.js). Teraz, podczas debugowania kodu, za każdym razem kiedy zatrzymamy program, w oknie Threads (dostępnym w menu View→More Debug Windows→Threads, lub po wciśnięciu klawiszy Ctrl+Alt+H) zobaczymy listę zadań wraz z takimi informacjami jak ich stan oraz zużycie pamięci, co zostało pokazane na rysunku 5.
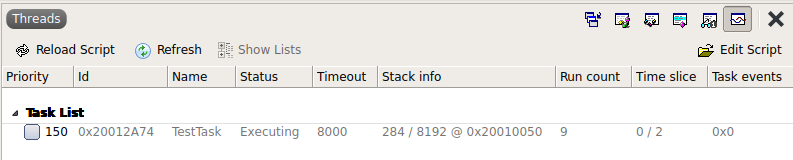 Rys. 5. Informacja o zadaniach w systemie embOS
Rys. 5. Informacja o zadaniach w systemie embOS
Migracja z FreeRTOS na embOS
Mimo różnic w implementacji, przenoszenie aplikacji pomiędzy systemami FreeRTOS i embOS jest stosunkowo proste, ponieważ zasada obsługi zadań, jak i komunikacji pomiędzy nimi pozostaje taka sama. Odpowiadające sobie typy danych i wywołania obu systemów operacyjnych użyte w przykładzie zostały przedstawione w tabeli 4. W tabeli pominięto wywołania związane z obsługą kolejek i liczników programowych, ponieważ nie zostały one użyte w kodzie programu po migracji. Tabela pomija również kwestie inicjalizacji sprzętu – w systemie embOS jest za to odpowiedzialna funkcja OS_InitHW(), zdefiniowana w pakiecie ewaluacyjnym i użyta w kodzie na listingu 1. Konfiguruje ona m. in. kontroler przerwań NVIC, zegar systemowy oraz pamięci podręczne. W przypadku systemu FreeRTOS, inicjalizacja części peryferiów oraz biblioteki HAL odbywa się zaraz na początku funkcji main, niezależnie od systemu, natomiast SysTick jest konfigurowany w ramach kodu zależnego od platformy i znajdującego się w pliku port.c.
Tab. 4. Porównanie interfejsu w systemach FreeRTOS i embOS
| embOS | FreeRTOS |
| Inicjalizacja systemu i uruchomienie planisty. | |
| void OS_InitKern(void);
vod OS_Start(void); |
void vTaskStartScheduler(void); |
| Tworzenie zadania, typ uchwytu i prototyp funkcji implementującej zadanie. | |
| void OS_CREATETASK(
OS_TASK* pTask, char* pName, void* pRoutine, OS_PRIO Priority, void* pStack); |
BaseType_t xTaskCreate(
TaskFunction_t pvTaskCode, const char * const pcName, unsigned short usStackDepth, void *pvParameters, UBaseType_t uxPriority, TaskHandle_t *pxCreatedTask); |
| OS_TASK | TaskHandle_t |
| void task(void); | void vTask(void const *arg); |
| Obsługa zdarzeń/notyfikacji | |
| void OS_SignalEvent(
OS_TASK_EVENT Event, OS_TASK* pTask); |
BaseType_t xTaskNotifyGive(
TaskHandle_t xTaskToNotify);
BaseType_t xTaskNotify( TaskHandle_t xTaskToNotify, uint32_t ulValue, eNotifyAction eAction );
BaseType_t xTaskNotifyFromISR( TaskHandle_t xTaskToNotify, uint32_t ulValue, eNotifyAction eAction, BaseType_t *pxHigherPriorityTaskWoken ); |
| S_TASK_EVENT OS_WaitEventTimed(
OS_TASK_EVENT EventMask, OS_TIME TimeOut);
OS_TASK_EVENT OS_WaitEvent( OS_TASK_EVENT EventMask); |
uint32_t ulTaskNotifyTake(
BaseType_t xClearCountOnExit, TickType_t xTicksToWait);
BaseType_t xTaskNotifyWait( uint32_t ulBitsToClearOnEntry, unt32_t ulBitsToClearOnExit, uint32_t *pulNotificationValue, TickType_t xTicksToWait ); |
Zdarzenia i notyfikacje
Komentarza wymaga kwestia zdarzeń i notyfikacji. Oba mechanizmy działają analogicznie i polegają na przesłaniu do zadania wartości 32-bitowej z innego zadania lub przerwania. Przekazywana wartość jest najczęściej maską bitową, na której zakodowane są zdarzenia, dzięki czemu możliwe jest jednoczesne odebranie wielu zdarzeń. Oba systemy umożliwiają oczekiwanie na zdarzenie (lub notyfikację) przez określoną ilość czasu. Warto także zwrócić uwagę na to, że system FreeRTOS posiada funkcje przeznaczone do wywoływania wyłącznie w zadaniach, lub w przerwaniach. W embOS dostępna jest jedna funkcja, którą można wywołać niezależnie od kontekstu.
W przypadku tworzenia zadań można zauważyć dwie zasadnicze różnice. System FreeRTOS sam zarządza przydzieloną mu pulą pamięci, która jest wykorzystywana m. in. na stosy tworzonych zadań. Alokacja pamięci – statyczna, lub dynamiczna, jest wykonywana przez jeden z dostępnych alokatorów. EmbOS z kolei, wymaga jawnego podania bloku pamięci, w którym zostanie umieszczony stos zadania. Druga różnica widoczna jest w prototypach funkcji implementujących zadanie – FreeRTOS pozwala na przekazanie argumentu w postaci wskaźnika typu void*, podczas gdy w systemie embOS zadania nie posiadają argumentów.
Przerwania
Ostatnią kwestią, o której należy pamiętać jest obsługa przerwań. O ile w przypadku systemu FreeRTOS nie były wymagane dodatkowe kroki, to w embOS musimy na początku każdego przerwania wywołać funkcję OS_EnterInterrupt(), natomiast na końcu – OS_LeaveInterrupt(). Jest to konieczne aby poinformować system o aktywnym przerwaniu.
Po wykonaniu niezbędnych zmian w oryginalnym kodzie, trzeba jeszcze dodać kolejne ścieżki i pliki w ustawieniach projektu. Znajdują się one w tabeli 5. Są to pliki niezbędne do obsługi peryferiów mikrokontrolera, pamięci SDRAM, wyświetlacza oraz panelu dotykowego. Na potrzeby przykładu użyte zostały sterowniki dostarczane razem z biblioteką STM32Cube. Do projektu musimy dodać także wymienioną w tabeli bibliotekę matematyczną ARM. Wymaga ona zdefiniowania symbolu ARM_MATH_CM7 w ustawieniach projektu (Preprocessor→Preprocessor Definitions). Pozwala on na dodanie odpowiednich plików nagłówkowych z biblioteki CMSIS.
Kompilacja i operacje zmiennoprzecinkowe
Ostatnią kwestią, którą poruszymy w tym rozdziale jest tryb kompilacji dla operacji zmiennoprzecinkowych. Parametry kompilacji wszystkich komponentów i naszej aplikacji muszą być zgodne, co oznacza że musimy dostosować się do biblioteki embOS. Interesujące nas parametry kompilacji znajdują się w jej nazwie: v7m (Cortex-M3/M4/M4F/M7/M7F), vfpv4 (VFPv4 z programową obsługą operacji zmiennoprzecinkowych), le (little endian). Wynika z tego, że w opcjach projektu, w polu Code Generation → ARM FP ABI Type należy ustawić wartość SoftFP. Z tego samego powodu do projektu została dodana biblioteka matematyczna w wersji niewymagającej sprzętowej obsługi operacji zmiennoprzecinkowych.
Tab. 5. Pliki sterowników z biblioteki STM32 HAL używane w projekcie
| STM32Cube_FW_F7 |
| Drivers/CMSIS/Lib/GCC/libarm_cortexM7l_math.a |
| Drivers/BSP/STM32746G-Discovery |
| Drivers/BSP/STM32746G-Discovery/stm32746g_discovery_audio.c |
| Drivers/BSP/STM32746G-Discovery/stm32746g_discovery_sdram.c |
| Drivers/BSP/STM32746G-Discovery/stm32746g_discovery_ts.c |
| Drivers/BSP/STM32746G-Discovery/stm32746g_discovery.c |
| Drivers/BSP/Components |
| Drivers/BSP/Components/wm8994/wm8994.c |
| Drivers/BSP/Components/ft5336/ft5336.c |
| Drivers/STM32F7xx_HAL_Driver/Inc |
| Drivers/STM32F7xx_HAL_Driver/Src/stm32f7xx_hal.c |
| Drivers/STM32F7xx_HAL_Driver/Src/stm32f7xx_hal_cortex.c |
| Drivers/STM32F7xx_HAL_Driver/Src/stm32f7xx_hal_dma.c |
| Drivers/STM32F7xx_HAL_Driver/Src/stm32f7xx_hal_gpio.c |
| Drivers/STM32F7xx_HAL_Driver/Src/stm32f7xx_hal_i2c.c |
| Drivers/STM32F7xx_HAL_Driver/Src/stm32f7xx_hal_pwr.c |
| Drivers/STM32F7xx_HAL_Driver/Src/stm32f7xx_hal_pwr_ex.c |
| Drivers/STM32F7xx_HAL_Driver/Src/stm32f7xx_hal_rcc.c |
| Drivers/STM32F7xx_HAL_Driver/Src/stm32f7xx_hal_rcc_ex.c |
| Drivers/STM32F7xx_HAL_Driver/Src/stm32f7xx_hal_sai.c |
| Drivers/STM32F7xx_HAL_Driver/Src/stm32f7xx_hal_sdram.c |
| Drivers/STM32F7xx_HAL_Driver/Src/stm32f7xx_ll_fmc.c |
| Projects/STM32746G-Discovery/Templates/Inc/stm32f7xx_hal_conf.h |
Biblioteka graficzna
W oryginalnym projekcie do stworzenia interfejsu graficznego użyto bibliotekę STemWin. Zmiana na bibliotekę emWin nie niesie ze sobą żadnych trudności, ponieważ API użytych w projekcie komponentów jest identyczne. Jedyne co musimy zrobić to dodać skompilowane źródła biblioteki i jej pliki nagłówkowe z pakietu ewaluacyjnego do naszego projektu. Wspomniane pliki znajdują się w katalogu GUI, w którym znajdziemy kilka wersji biblioteki:
- debug z formatem kolorów ABGR
- release z formatem kolorów ABGR
- debug z formatem kolorów ARGB
- release z formatem kolorów ARGB.
W przykładzie użyto pierwszej z nich, dodano za pomocą opcji Add Existing File. Oprócz niej musimy także dodać odpowiednie ścieżki do plików nagłówkowych i pliki źródłowe konfigurujące bibliotekę do pracy z systemem embOS i wyświetlaczem znajdującym się na płytce STM32F746G-DISCO:
- ./GUI/Inc
- ./GUI/OS/GUI_X_embOS.c
- ./GUI/Setup/STM32F746_ST_STM32F746G_Discovery/
- ./GUI/Setup/STM32F746_ST_STM32F746G_Discovery/BSP_GUI.c
- ./GUI/Setup/STM32F746_ST_STM32F746G_Discovery/GUIConf.c
- ./GUI/Setup/STM32F746_ST_STM32F746G_Discovery/LCDConf.c
Konfiguracja linkera
Kolejną kwestią którą musimy się zająć jest konfiguracja linkera. W opisywanym projekcie biblioteka emWin pracuje w trybie Memory Device, co oznacza, że wszystkie operacje są wykonywane w buforze w pamięci mikrokontrolera, a gotowy obraz wysyłamy do wyświetlacza. Dzięki temu można ograniczyć transmisję danych pomiędzy mikrokontrolerem a wyświetlaczem, a także uniknąć efektu migotania podczas rysowania kolejnych warstw obrazu, takich jak bitmapy, tekst i inne elementy interfejsu użytkownika.
Bufor obrazu
Podejście to niesie ze sobą konieczność zdefiniowania wystarczająco dużego bufora w pamięci, reprezentującego wyświetlany obraz. Znajduje się on w pliku GUIConf.c i posiada atrybut section („.GUI_RAM”). Oznacza to, że powinien zostać umieszczony w sekcji pamięci o nazwie .GUI_RAM, której definicja, wraz z pozostałymi obszarami pamięci znajduje się w pliku flash_placement.xml. Znajdziemy go w pakiecie ewaluacyjnym w katalogu BSP/ST/STM32F746_STM32F746G_Discovery/Setup, skąd możemy go skopiować do swojego projektu i dodać w ustawieniach w polu Linker→Section Placement File, które będzie dostępne po zmianie linkera z SEGGER na GNU (pole Linker→ Linker). Drugim z plików, który będzie nam potrzebny jest STM32F746NG_MemoryMap.xml, znajdujący się w tym samym katalogu. Zawiera on definicje wszystkich dostępnych w systemie pamięci RAM oraz Flash. Podobnie jak poprzednio, powinniśmy go skopiować do projektu i dodać w ustawieniach, w polu Build → Memory Map File.
Zmiana linkera niesie ze sobą także potrzebę zmiany plików startowych. Niezbędne pliki znajdziemy w pakiecie ewaluacyjnym:
- ./BSP/ST/STM32F746_STM32F746G_Discovery/Setup/thumb_crt0.s
- ./BSP/ST/STM32F746_STM32F746G_Discovery/Setup/DeviceSupport/STM32F7x6_v1r1_Vectors.s
- ./BSP/ST/STM32F746_STM32F746G_Discovery/Setup/DeviceSupport/STM32F7xx_Startup.s
Zawierają one kod rozruchowy oraz definicje wektorów przerwań. Tak jak zwykle powinniśmy je dodać do projektu, jednocześnie usuwając obecnie używane:
- SEGGER_Thumb Startup.s
- Cortex_M_Startup.s
Nowe pliki startowe definiują funkcję Reset_Handler, która jest jednocześnie punktem wejściowym do aplikacji. Należy poinformować o tym linker, wpisując jej nazwę w ustawieniach projektu w polu Linker → Entry Point, zastępując dotychczasową wartość.
Ostatnią rzeczą jaka powinniśmy zrobić jest dodanie konfiguracji zegara. Funkcję konfiguracyjną – SystemClock_Config, możemy skopiować z jednego z przykładów znajdujących się w bibliotece STM32Cube. W opisywanym przykładzie użyto funkcję z pliku main.c znajdującego się w katalogu Projects/STM32746G-Discovery/Applications/StemWin/StemWin_MemoryDevice/Core/Src i wywołana na samym początku funkcji main(), przed inicjalizacja systemu embOS.
 Fotowoltaika perowskitowa: od wydajności laboratoryjnej do masowej komercjalizacji
Fotowoltaika perowskitowa: od wydajności laboratoryjnej do masowej komercjalizacji  Czy kamery termowizyjne pokazują nam całą prawdę?
Czy kamery termowizyjne pokazują nam całą prawdę?  Generowanie ujemnego napięcia odniesienia – eksperymenty z zestawem ADALM2000
Generowanie ujemnego napięcia odniesienia – eksperymenty z zestawem ADALM2000 

![O konkursie organizowanym przez firmę TRUMPF Huettinger i polskie uczelnie techniczne opowiada Alicja Peresada i prof. Jacek Rąbkowski oraz kilkoro nagrodzonych dyplomantów: mgr inż. Jakub Dobosz, inż. Maja Zielińska, dr inż. Jakub Kołodziej, dr inż Weronika Hryniewska-Guzik i dr inż. Grzegorz Bartyzel. Zapraszamy do obejrzenia filmu! [materiał redakcyjny]](https://mikrokontroler.pl/wp-content/uploads/2026/07/TRUMPF-czolowka.png "https://www.youtube.com/watch?v=XkeyLmtLfxo")



