





ZL27ARM: współpraca z odbiornikiem GPS z modułu KAmodGPS
W projekcie zrealizowano następujące zadanie: odczyt współrzędnych z modułu KAmodGPS w formacie NMEA-0183, i taka obróbka odczytanych danych, żeby szerokość geograficzna była przedstawiona na wyświetlaczu w formacie DMS (stopnie, minuty, sekundy), a długość geograficzna w formacie DM (stopnie, minuty).
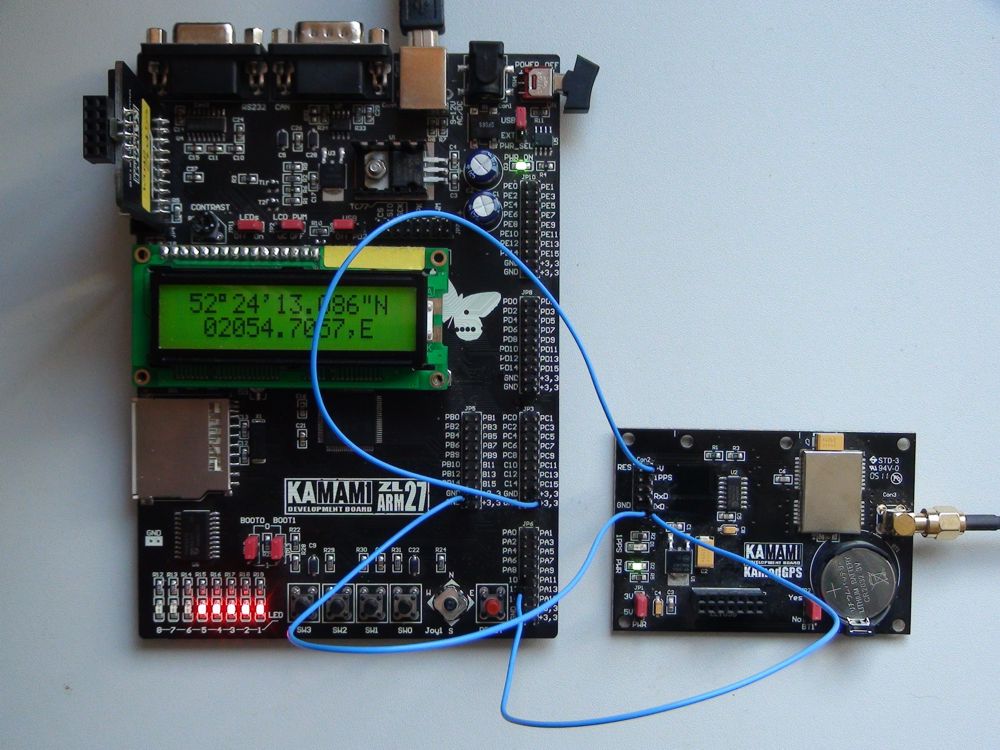
Najprostszym rozwiązaniem tak postawionego zadania okazało się połączenie modułu KAmodGPS za pomocą trzech przewodów do zestawu ZL27ARM i prezentacja wyniku działania na wyświetlaczu LCD 2×16, dla którego gniazdo znajduje się w standardowym wyposażeniu zestawu uruchomieniowego ZL27ARM (STM32F103).
Ponieważ dane z GPS są wyłącznie odbierane, to w przykładzie wykorzystano linię TxD KAmodGPS, linia RxD nie została podłączona. Schemat połączeń pomiędzy KAmodGPS i ZL27ARM pokazano na rysunku 1.
Rys. 1. Schemat połączeń pomiędzy ZL27ARM i KAmodGPS
Przed dołączeniem zasilania należy sprawdzić położenie zworki PWR w module KamodGPS i ustawić ją na odpowiednie napięcie zasilania modułu, w naszym przykładzie będzie to 3,3 V).
W programie głównym main odczytywana jest szerokość geograficzna oraz długość geograficzna za pomocą funkcji getch():
char getch(void)
{
char tmp;
while(USART_GetFlagStatus(USART1, USART_FLAG_RXNE) == RESET);
tmp = USART_ReceiveData(USART1);
return tmp;
}
 Prof. Ryszard Tadeusiewicz: Droga rozwoju robotów humanoidalnych
Prof. Ryszard Tadeusiewicz: Droga rozwoju robotów humanoidalnych  Według Synektik za 4 lata roboty będą wykonywać co dziesiąty zabieg chirurgii ogólnej w Polsce
Według Synektik za 4 lata roboty będą wykonywać co dziesiąty zabieg chirurgii ogólnej w Polsce  Dlaczego Edge AI odgrywa coraz większą rolę w inteligentnym transporcie?
Dlaczego Edge AI odgrywa coraz większą rolę w inteligentnym transporcie? 


![Szymon Robak oprowadza po katowickim Laboratorium Badań Kompatybilności Elektromagnetycznej w Sieć Badawcza Łukasiewicz - Instytucie Sztucznej Inteligencji i Cyberbezpieczeństwa. Zapraszamy na film! [materiał redakcyjny]](https://mikrokontroler.pl/wp-content/uploads/2026/06/Szymon-Robak-tytulowe.png "https://www.youtube.com/watch?v=gHcP8AajoN4")
![Zapraszamy do obejrzenia filmu i wysłuchania krótkich wypowiedzi prelegentów Hardware Forum 2026 i organizatorów majowej konferencji dla inżynierów z branży elektronicznej: Konrad Bruliński z Lemontech, prof. Krzysztof Kulpa z Politechniki Warszawskiej, Zbigniew Huber z FLC, Ewa Załupska z firmy KROK, Jerzy Kozieł z MPTECH, Grzegorz Potyralski z VIGO Photonics, dr Krzysztof Czuba z Politechniki Warszawskiej, Anna Beata Kalisz Hedegaard z Quantum Security Defence, Adrian Cichosz z Elhurt Dystrybucja Anna Kamińska z Creotech Quantum, oraz Łukasz Jaeszke i Adam Jaeszke z TEK.day [materiał redakcyjny]](https://mikrokontroler.pl/wp-content/uploads/2026/05/tytulowe-film-1.png "https://www.youtube.com/watch?v=BgxJVTwYJ-s")

