






Projektowanie układów IC-CPD: Podstawowe wytyczne dotyczące sprzętu i oprogramowania dla urządzeń sterowania i zabezpieczeń wbudowanych w kabel ładowania
W artykule opisano zasady projektowania urządzeń przeznaczonych do ładowania pojazdów elektrycznych (EVSE) typu 2. W formie ogólnej są one ujęte w normie IEC 61851-1, a szczegóły dotyczące urządzeń EVSE typu 2 zebrano w normie uzupełniającej IEC 62752. Wytyczne są zgodne z normami i zostały zilustrowane nowym projektem referencyjnym firmy Analog Devices. Negocjacje między pojazdem elektrycznym (EV) a EVSE podczas sesji ładowania przedstawiono za pomocą przebiegu sygnału sterującego (CP), podkreślając stany zdefiniowane w normie. Przebiegi, wraz z przedstawionymi komunikatami debugowania, potwierdzają słuszność wytycznych i pozwalają lepiej zrozumieć proces ładowania pojazdów elektrycznych, ułatwiając tym samym proces projektowania.
Wprowadzenie
Rynek pojazdów elektrycznych (EV) rozwija się w sposób ciągły z postępem wykładniczym. Szacuje się, że do 2030 roku na drogach będzie jeździć około 500 milionów pojazdów elektrycznych. Liczba ta wydaje się prawdopodobna szczególnie wtedy, gdy weźmiemy pod uwagę dane przedstawione przez Międzynarodową Agencję Energetyczną1. Zawierają one porównanie danych historycznych z lat 2022 i 2023. Wynika z nich 35-procentowy wzrost (z 10,2 mln do 13,8 mln) łącznej sprzedaży pojazdów elektrycznych z napędem akumulatorowym (BEV) oraz hybrydowych pojazdów elektrycznych typu plug-in (PHEV). Ta sama agencja prognozuje, że światowa sprzedaż w 2030 r. osiągnie 40,7 mln sztuk rocznie, a w 2035 r. 56,5 mln sztuk rocznie. Kwestie związane ze zmianami klimatu i zanieczyszczeniem powietrza w gęsto zaludnionych obszarach mieszkalnych są głównymi czynnikami napędzającymi rozwój środków transportu o wysokiej wydajności i zerowej emisji spalin.2,3 W związku z przewidywalnym wzrostem liczby pojazdów elektrycznych rynek musi nie tylko sprostać popytowi, ale także być w stanie dostarczyć najbardziej wydajne rozwiązania w zakresie ładowania — uwzględniające przystępność cenową, bezpieczeństwo i wpływ na środowisko.
Niższe poziomy mocy ładowania uznaje się za wystarczające, ponieważ większość użytkowników samochodów osobowych przejeżdża średnio tylko około 48 kilometrów dziennie (30 mil), jak wynika z danych Solaronev4 dotyczących różnych regionów świata. Dane dotyczące Stanów Zjednoczonych opierają się na statystykach Statista5 oraz bazie danych Federalnej Administracji Autostrad6. W przypadku domowych stacji ładowania pojazdów elektrycznych realnym rozwiązaniem są urządzenia sterujące i zabezpieczające wbudowane w kabel (IC-CPD), dostarczane wraz z nowo zakupionymi pojazdami elektrycznymi. Pozwalają one wyeliminować wysokie koszty związane z instalacją i konserwacją urządzeń o dużej mocy. Biorąc pod uwagę obecne złożone kwestie związane z rozwiązaniami w zakresie ładowania, w przyszłości wzrośnie nie tylko rynek pojazdów elektrycznych, ale również rynek sprzętu do ładowania.
Czym jest urządzenie do ładowania pojazdów elektrycznych (EVSE) i gdzie znajduje zastosowanie?
EVSE to urządzenie umożliwiające użytkownikowi bezpieczne ładowanie pojazdów typu PHEV lub BEV. Urządzenia EVSE klasyfikuje się na podstawie poziomów mocy ładowania. W terminologii dotyczącej pojazdów elektrycznych poziom ładowania odnosi się do rodzaju dystrybucji energii elektrycznej, norm oraz maksymalnej mocy systemu ładowania, zgodnie z definicją zawartą w normie SAE J1772 i normą międzynarodową IEC 62196-1.
Standardowa funkcjonalność Mode 2
Mode 2 to metoda podłączenia pojazdu elektrycznego do standardowego gniazdka sieci zasilającej prądu przemiennego, wykorzystująca urządzenie EVSE prądu przemiennego z funkcją CP oraz system ochrony osobistej przed porażeniem prądem, który jest umieszczony pomiędzy standardową wtyczką a pojazdem elektrycznym [IEC 62752:2017 6.2.2].
Najważniejszą funkcją realizowaną przez IC-CPD jest ochrona przed porażeniem prądem elektrycznym. Jest ona realizowana za pomocą wyłącznika różnicowoprądowego (RCD) co najmniej typu A oraz układu pomocniczego do wykrywania prądów stałych lub za pomocą wyłącznika różnicowoprądowego (RCD) typu B. Funkcja ta ma kluczowe znaczenie, ponieważ ładowarka może być używana na zewnątrz, w miejscach publicznych, gdzie istnieje możliwość kontaktu z wodą oraz gdzie może zostać przypadkowo lub celowo dotknięta przez ludzi. Musi być zapewnione uziemienie ochronne, a w przypadku awarii zasilanie urządzenie musi zostać odłączone.
Ogólny schemat blokowy urządzenia IC-CPD typu 2 przedstawiono na rysunku 1. Na podstawie schematu opartego na tym rysunku, można zrealizować wszystkie funkcje wymagane w normie IEC 61851-1. W zależności od preferowanego rozwiązania, w ogólnym schemacie niektóre bloki muszą zostać dodane lub mogą być pominięte. Na przykład, jeśli prąd jest wykrywany za pomocą przekładnika prądowego, wówczas podczas łączenia z jednostką mikrokontrolera (MCU) układ scalony izolacji można pominąć. W ten sam sposób, jeśli stosowany jest przekaźnik z funkcją wykrywania zapieczenia styków, można pominąć układ ich wykrywania.
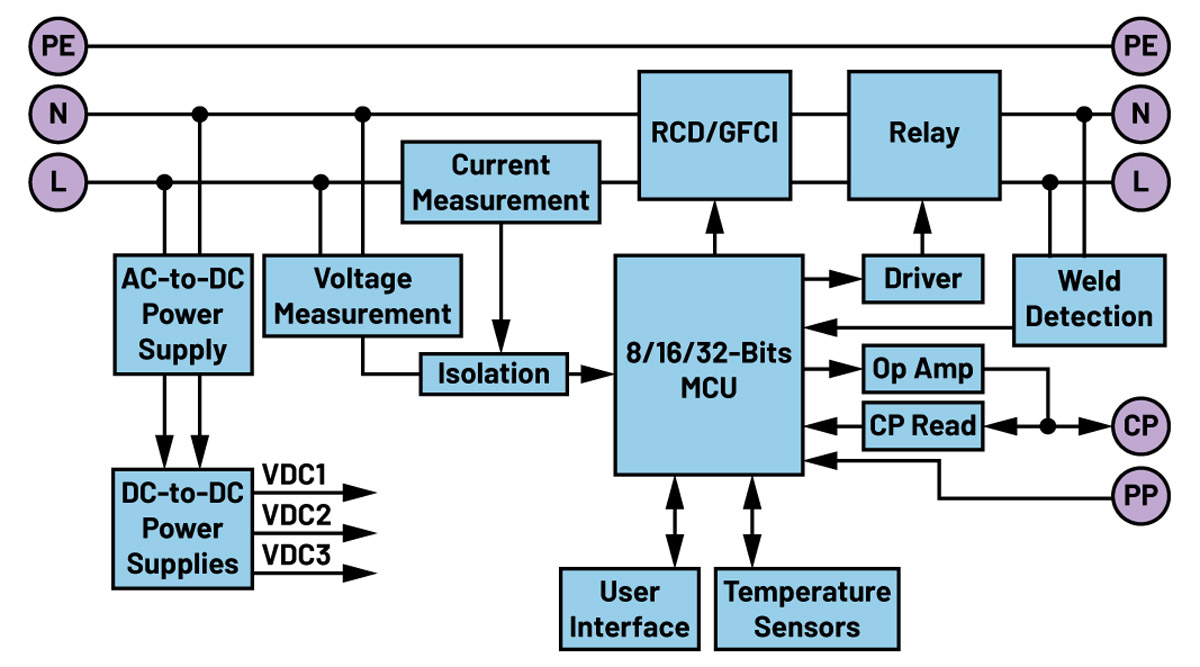
Rys. 1. Ogólny schemat blokowy ładowarki EVSE Type 2
Ładowarka EVSE Type 2 firmy Analog Devices
Schemat blokowy ładowarki EVSE Type 2 firmy Analog Devices, przedstawiony na rysunku 2, zawiera 3-kanałowy izolowany przetwornik analogowo-cyfrowy (ADC) typu sigma-delta (Σ-Δ) ADE9113, służący do pomiaru napięcia i prądu na wejściu zasilania jednofazowego oraz do pomiaru napięcia przekaźnika w celu wykrywania zapieczenia styków.
Bezpieczną pracę zapewnia wbudowany wyłącznik różnicowoprądowy (RCD) 6 mA DC/30 mA rms. Dostępne są również funkcje wykrywania przepięcia, zbyt niskiego napięcia, przetężenia, przegrzania, uziemienia ochronnego (PE) oraz obecności diody EV. Zintegrowana izolacja ułatwia połączenie z mikrokontrolerem (MCU). Procesor Arm® Cortex®-M4 MAX32655 o ultraniskim poborze mocy implementuje logikę sterowania systemem i komunikacji z pojazdem elektrycznym (EV) poprzez interfejs CP. Rozwiązanie zawiera również interfejs do programowania i debugowania. Interfejs Bluetooth® 5.2 umożliwia łączność z urządzeniami zewnętrznymi. Komunikacja między mikrokontrolerem a układem ADE9113 jest realizowana poprzez interfejs SPI.
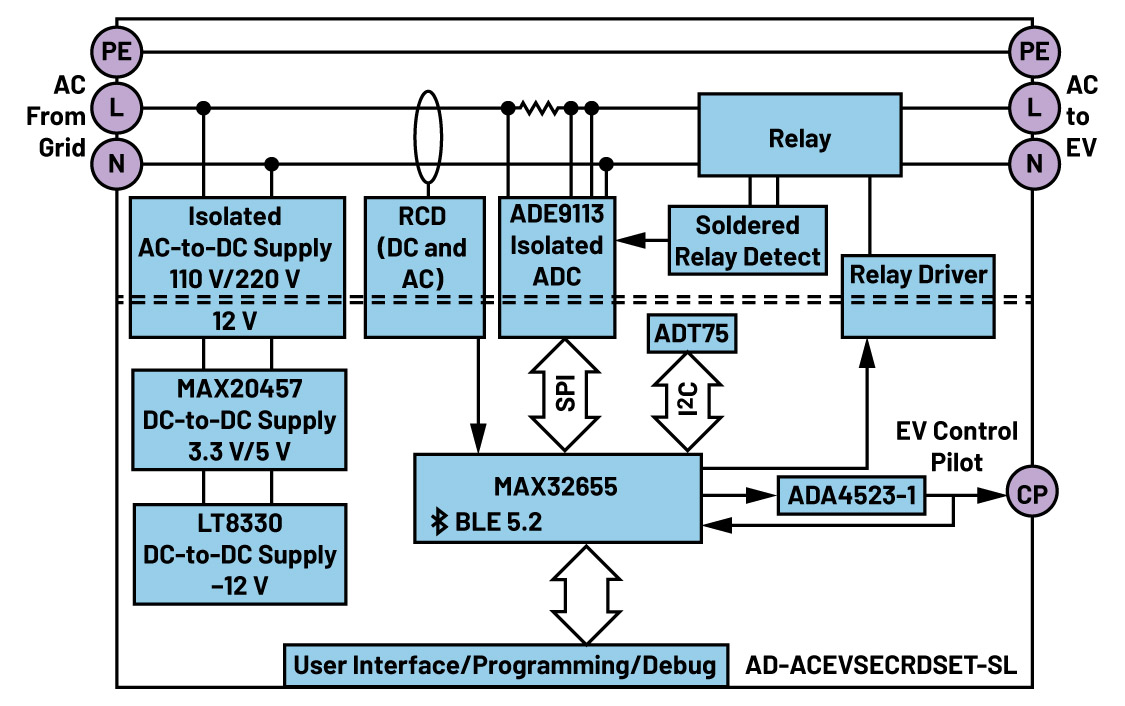
Rys. 2. Uproszczony schemat blokowy rozwiązania EVSE typu 2 firmy Analog Devices (AD-ACEVSECRDSET-SL)
Sygnał sterujący (CP) niezbędny do realizacji komunikacji między stacją ładowania EVSE a pojazdem elektrycznym (EV) jest generowany przez układ MAX32655 oraz niskoszumny wzmacniacz operacyjny ADA4523-1 o zerowym dryfcie.
System jest zasilany z jednofazowego źródła prądu przemiennego o napięciu 230 V. Napięcie 12 V dostarcza do płytki izolowany zasilacz impulsowy AC-DC (SMPS), a wysokowydajne, podwójne, synchroniczne przetwornice buck MAX20457 do zastosowań motoryzacyjnych obniżają napięcie do 5 V i 3,3 V. Napięcia te zasilają izolowaną stronę płytki. Układ LT8330 pracujący w konfiguracji odwracającej wytwarza napięcie ujemne 12 V potrzebne dla dolnej strony sygnału CP.
12-bitowy cyfrowy czujnik temperatury ADT75 monitoruje temperaturę urządzenia i przesyła ją do mikrokontrolera w celu ochrony przed przegrzaniem.
Projekt bazuje na pakiecie oprogramowania open source oraz aplikacjach referencyjnych, które umożliwiają rozpoczęcie tworzenia niestandardowego oprogramowania na zamówienie od sprawdzonej implementacji, zweryfikowanej pod kątem zgodności z obowiązującymi normami. System został zaprojektowany zgodnie z normami IEC 61851 i IEC 62752.
Izolowany przetwornik analogowo-cyfrowy
ADE9113 to izolowany, 3-kanałowy przetwornik analogowo-cyfrowy typu sigma-delta, przeznaczony do pomiarów wielofazowych systemów zasilania z zastosowaniem bocznikowych czujników prądu. Izolacja danych i zasilania opiera się na technologii iCoupler® firmy ADI. Układ zawiera trzy przetworniki analogowo-cyfrowe. Jeden kanał służy do pomiaru napięcia na boczniku, gdy jest on używany do wykrywania prądu. Maksymalnie dwa dodatkowe kanały są przeznaczone do pomiaru napięć, które są zazwyczaj wykrywane za pomocą dzielników rezystancyjnych. W tym zastosowaniu jeden z kanałów napięciowych służy do wykrywania, czy styki przekaźnika są zapieczone.
Omawiany przetwornik analogowo-cyfrowy zawiera układ isoPower®, zintegrowany, izolowany przetwornik DC-DC. Przetwornik DC-DC zapewnia stabilizowane zasilanie wymagane przez pierwszy stopień przetworników analogowo-cyfrowych. Układ ten eliminuje potrzebę stosowania zewnętrznego bloku izolacji DC-DC. Technologia iCoupler chip scale transformer jest również stosowana do izolowania sygnałów logicznych między pierwszym a drugim stopniem przetwornika ADC. Efektem są rozwiązania o całkowitej izolacji i niewielkich rozmiarach. Zapewnia ono dostęp do wyjść przetwornika ADC, rejestrów konfiguracyjnych i rejestrów stanu, co ułatwia współpracę z mikrokontrolerami. Może być taktowany z zastosowaniem rezonatora kwarcowego lub zewnętrznym przebiegiem zegarowym.
Napięcia dla wejść układu ADE9113 muszą być osiągnięte poprzez dobór odpowiednich wartości rezystorów dzielnika napięciowego oraz rezystancji bocznikowej. Zakres ten odpowiada międzyszczytowemu napięciu pseudoróżnicowemu, które należy doprowadzić do przetworników ADC w celu wygenerowania pełnoskalowej odpowiedzi, gdy piny IM i VxM są podłączone do AGND, pinu 11. Piny IM i VxM są dołączone do AGND za pomocą filtrów antyaliasingowych.
Wykrywanie zapieczenia styków przekaźnika
Drugie wejście napięciowe układu ADE9113 służy do wykrywania stanu styków przekaźnika.
Na rysunku 3 przedstawiono uproszczoną symulację w programie LTspice® dla układów podłączonych do trzech kanałów wejściowych układu ADE9113, gdzie:
– R_contact to wartość rezystancji styków przekaźnika (wartość dla przekaźnika rozłączonego, rysunek 4, lub załączonego, rysunek 5, w zależności od symulowanego przypadku.
– V1P, V2P, V1M, V2M, IP i IM to wejścia kanałów układu ADE9113.
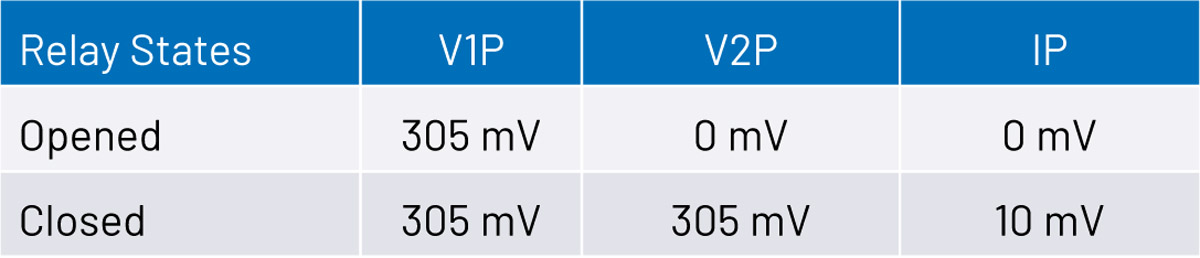
Wartości stanu przekaźnika dla dwóch przypadków przy napięciu wejściowym o amplitudzie 230 V i obciążeniu 23 Ω przedstawiono w tabeli 1.
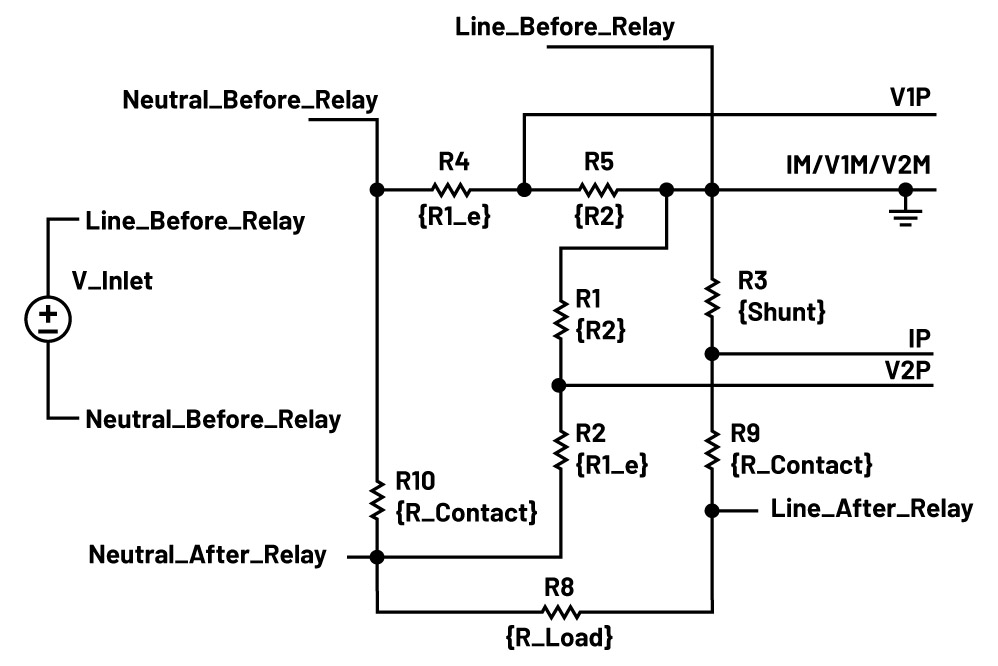
Rys. 3. Uproszczony schemat układu w programie LTspice podłączonego do kanałów wejściowych układu ADE9113
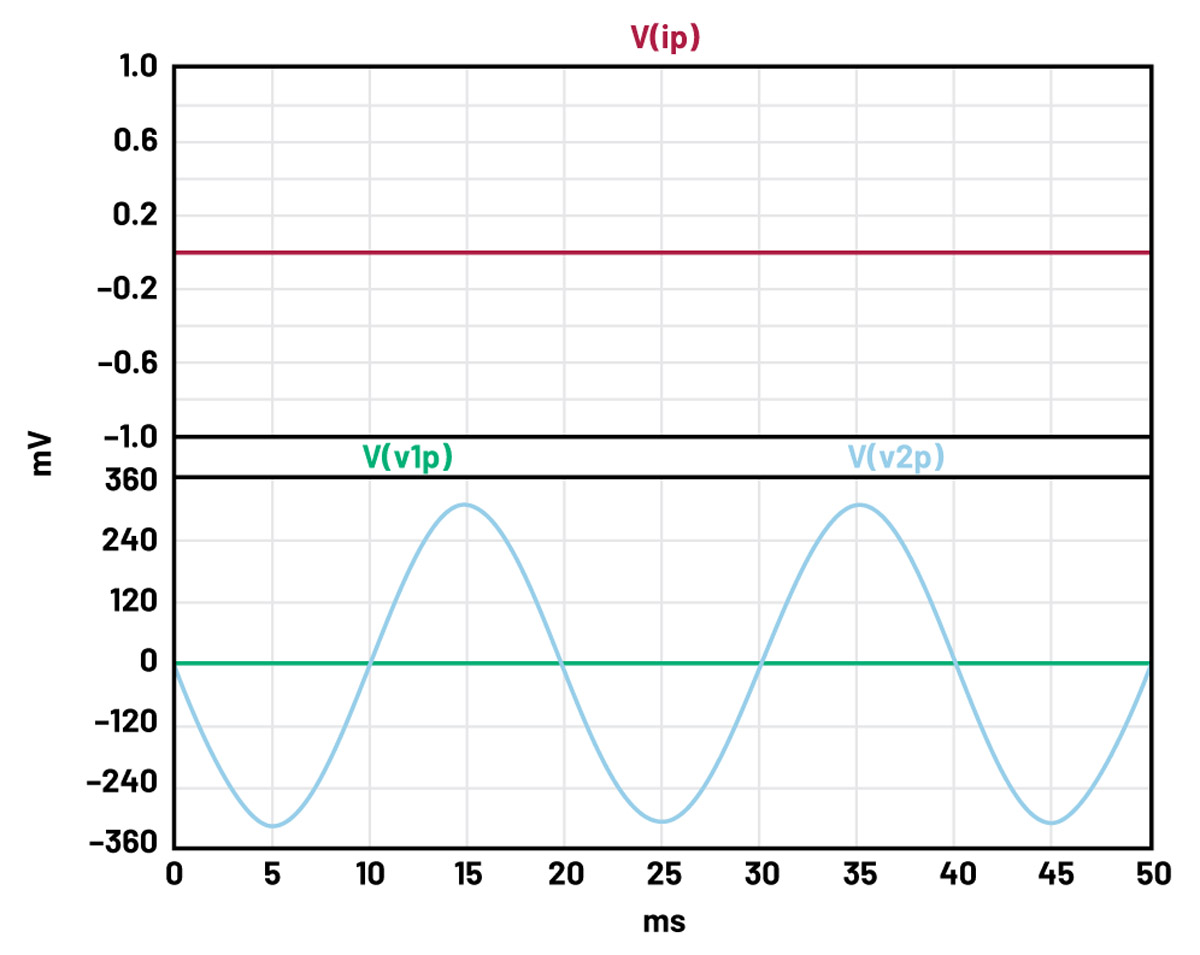
Rys. 4. Wartości napięcia i prądu dla kanałów przy otwartych stykach przekaźnika, odpowiadające rysunkowi 3
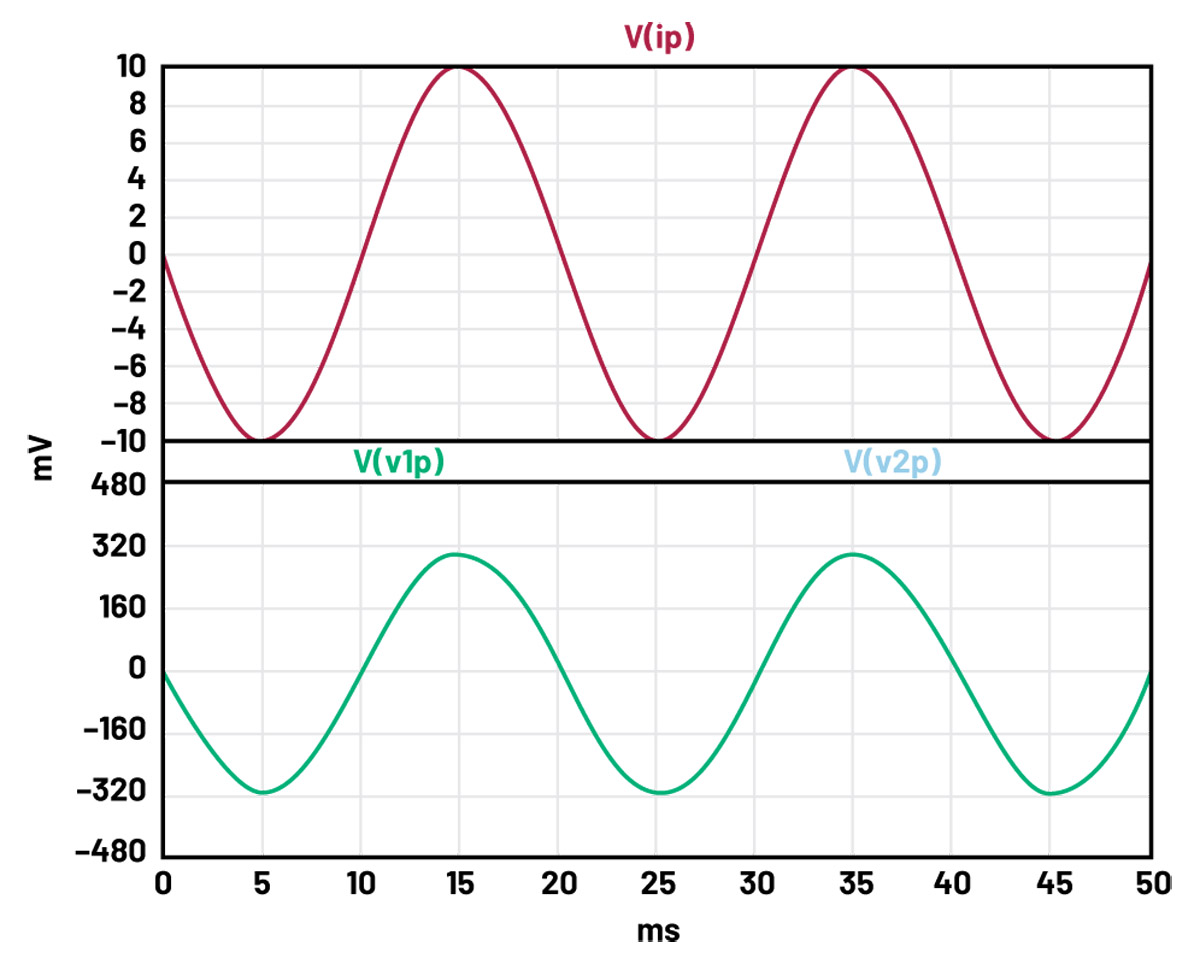
Rys. 5. Wartości napięcia i prądu dla kanałów przy zamkniętych stykach przekaźnika, odpowiadające rysunkowi 3
Tab. 1. Wartości napięcia i prądu kanałów ADE dla przypadków otwartych i zamkniętych styków przekaźnika
Test obecności uziemienia ochronnego sieci
Obecność przewodu ochronnego (PE) w sieci oraz zamiana przewodów fazowego i neutralnego są wykrywane, gdy urządzenie jest wyłączone, za pomocą układu przedstawionego na rysunku 6. Jeśli uziemienia nie ma, urządzenie przechodzi w stan błędu, a na diodach LED sygnalizujących stan wyświetlany jest komunikat o błędzie. Jeśli konieczne jest wykrycie odwrócenia fazy i przewodu neutralnego, wykorzystuje się dwa wyjścia transoptora w połączeniu z sygnałem PE_ERR.
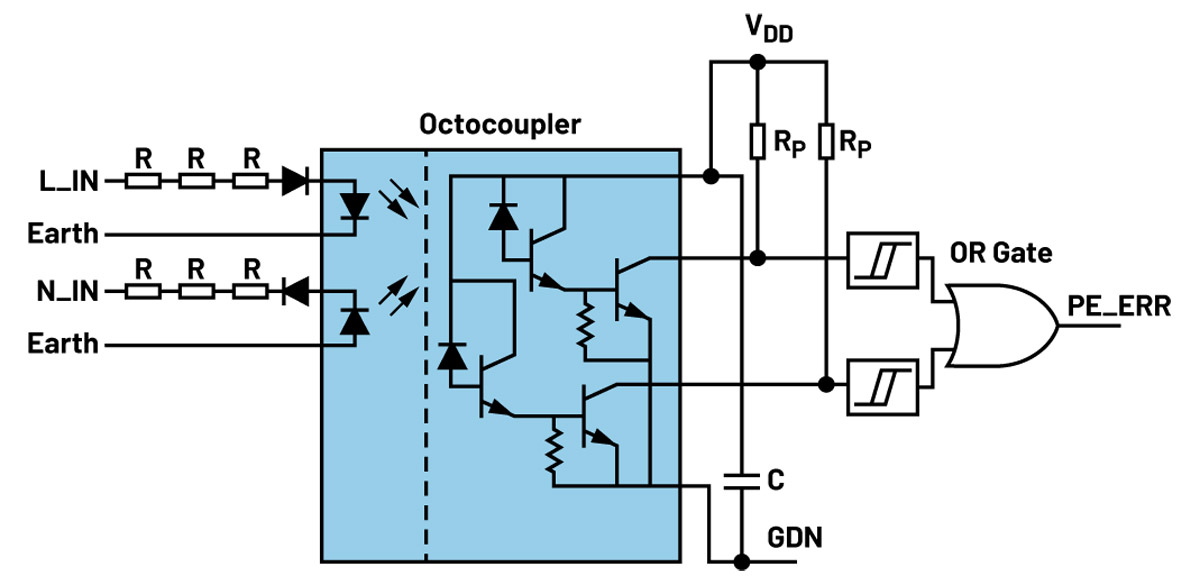
Rys. 6. Układ wykrywania obecności uziemienia sieciowego
Platforma oprogramowania
no-OS to platforma oprogramowania firmy Analog Devices przeznaczona dla systemów pozbawionych systemu operacyjnego (OS), znanych również jako „bare metal”. Platforma ta definiuje wspólny interfejs (API) umożliwiający dostęp do typowych urządzeń peryferyjnych w środowisku bare metal, takich jak uniwersalne wejścia/wyjścia (GPIO), SPI, I2C, RTC, timer, kontroler przerwań i inne. Wspólny interfejs API może być następnie użyty do inicjalizacji i sterowania tymi urządzeniami peryferyjnymi w jednolity sposób na wielu platformach mikrokontrolerów. Framework obsługuje obecnie mikroprocesory i układy SoC firm Intel i Xilinx, a także własne mikrokontrolery precyzyjne firmy ADI, kilka mikrokontrolerów z serii MAX32xx, mikrokontrolery STM32 firmy STMicroelectronics, PICO firmy Raspberry Pi oraz układy oparte na systemie mbedOS.
Dzięki zastosowaniu wspólnego interfejsu API sterowników, który jest zgodny z własnym stylem kodowania, no-OS może dostarczać projekty referencyjne dla płyt ewaluacyjnych ADI działających na różnym sprzęcie bazowym. Dzięki systemowi kompilacji no-OS użytkownicy mogą w krótkim czasie generować samodzielne projekty referencyjne i używać ich jako punktów wyjścia do własnych prac rozwojowych.
no-OS jest oprogramowaniem typu open source, a jego oficjalnym repozytorium jest no-OS na GitHubie. Użytkownicy mogą swobodnie korzystać z no-OS i rozpowszechniać go, pod warunkiem przestrzegania warunków licencji. Główne sterowniki no-OS używane w oprogramowaniu układowym dotyczą mikrokontrolera MAX32655, izolowanego 3-kanałowego przetwornika analogowo-cyfrowego sigma-delta ADE9113 oraz systemu monitorowania temperatury ADT75.
Maszyna stanów
Działanie modułu IC-CPD przedstawiono na rysunku 7. Zaimplementowana maszyna stanów jest zgodna z wytycznymi normy IEC 61851-1.
Oprogramowanie układowe używa trzech wyliczeń do implementacji logiki. Pierwszym z nich jest charger_state_e, które zawiera możliwe stany, a stany zmieniają się w zależności od wartości CP. Wyliczenie state_machine_events_e zawiera wszystkie możliwe zdarzenia, które mogą zostać wyzwolone. Zdarzenia te są używane do implementacji logiki stanów. Wyliczenie interface_err_status_e służy do interpretacji błędów.
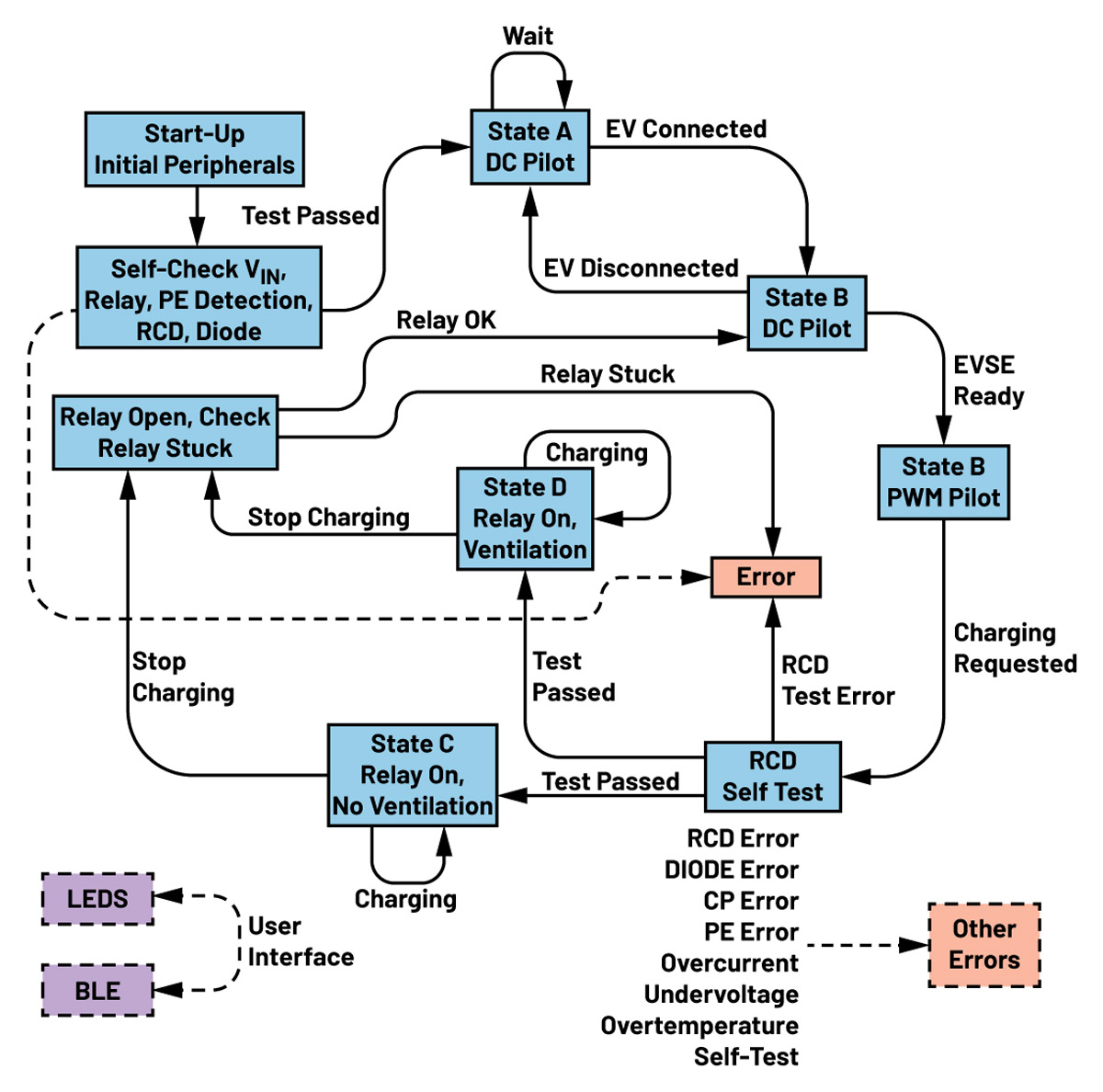
Rys. 7. Maszyna stanów
Wyniki testów
Testy przeprowadzono przy użyciu adaptera do stacji ładowania pojazdów elektrycznych Fluke FEV300 oraz różnych obciążeń (rysunek 8) lub przy użyciu złącza kablowego typu 2 z tymi samymi obciążeniami, albo z podłączonym pojazdem elektrycznym.
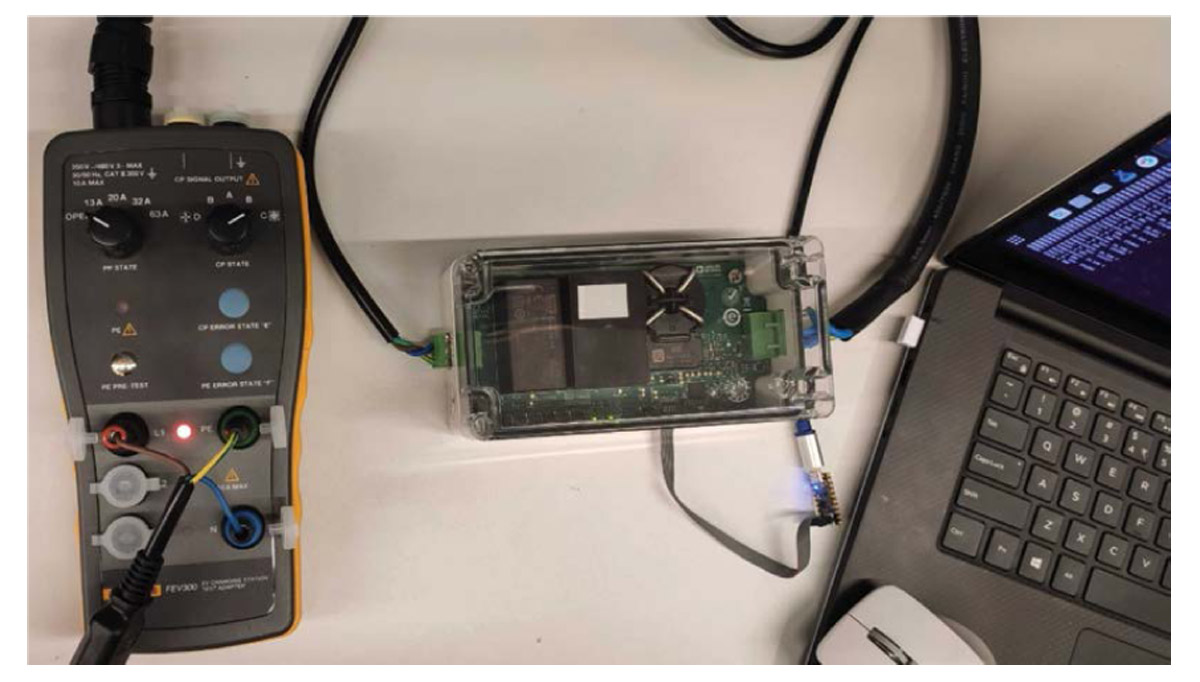
Rys. 8. Układ testowy z urządzeniem Fluke FEV300
Normalne warunki pracy (maszyna stanów ładowania) i wyniki wykrywania błędów wyłącznika różnicowoprądowego
Na rysunkach 9 i 10 przedstawiono przebiegi dwóch pomiarów testowych wykonanych przy użyciu stanowiska testowego z rysunku 8.
Pełny przebieg maszyny stanów od momentu włączenia zasilania, przy odłączonym pojeździe elektrycznym (w tym przypadku obciążenie rezystancyjne), do ładowania, gdzie stany są zaznaczone na przebiegu CP przedstawiono na rysunku 9.
Różnica między rysunkiem 9 a 10 polega na tym, że podczas stanu C (gdy pojazd elektryczny ładuje się) wyzwalane jest przerwanie przez wyłącznik różnicowoprądowy prądu przemiennego. Można to zaobserwować na trzecim przebiegu. IC-CPD otwiera przekaźnik, a na diodach LED wyświetlany jest komunikat o błędzie.
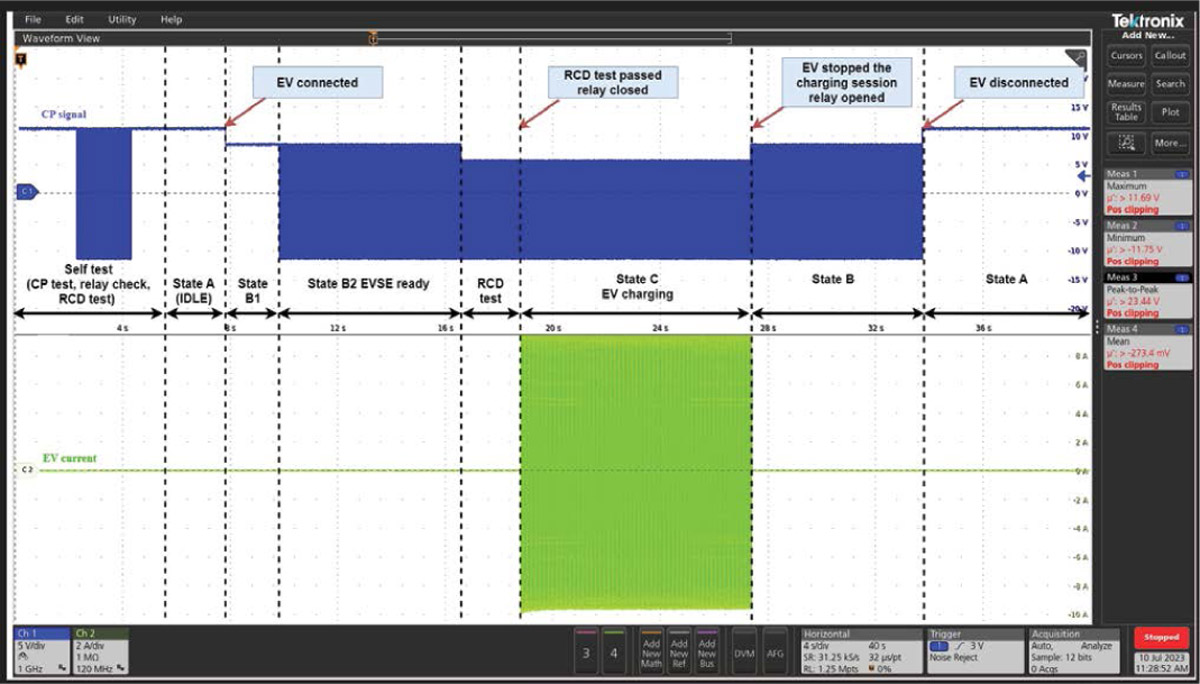
Rys. 9. Normalne warunki pracy z zaznaczeniem stanów EVSE-EV
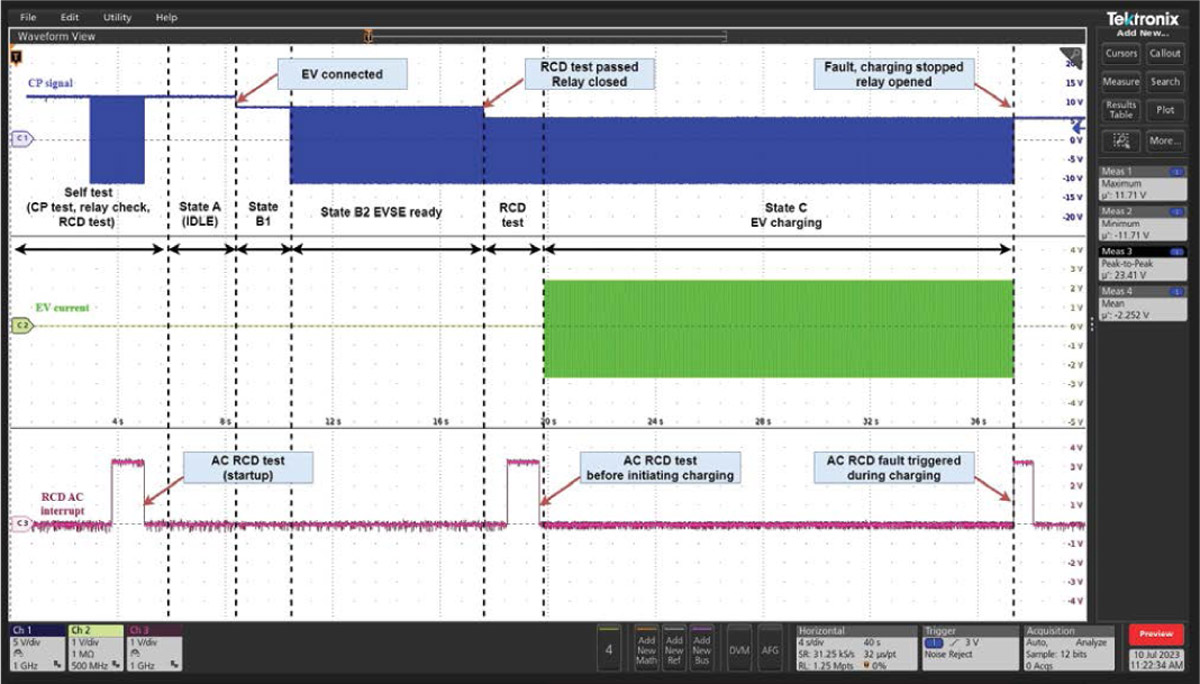
Rys. 10. Wykryto błąd wyłącznika różnicowoprądowego prądu przemiennego podczas sesji ładowania w stanie C (ładowanie bez wentylacji)
Komunikaty na rysunku 11 odpowiadają przypadkowi przedstawionemu na rysunku 9, który pokazuje pełną sesję ładowania od włączenia zasilania, przez ładowanie, aż do odłączenia pojazdu elektrycznego.
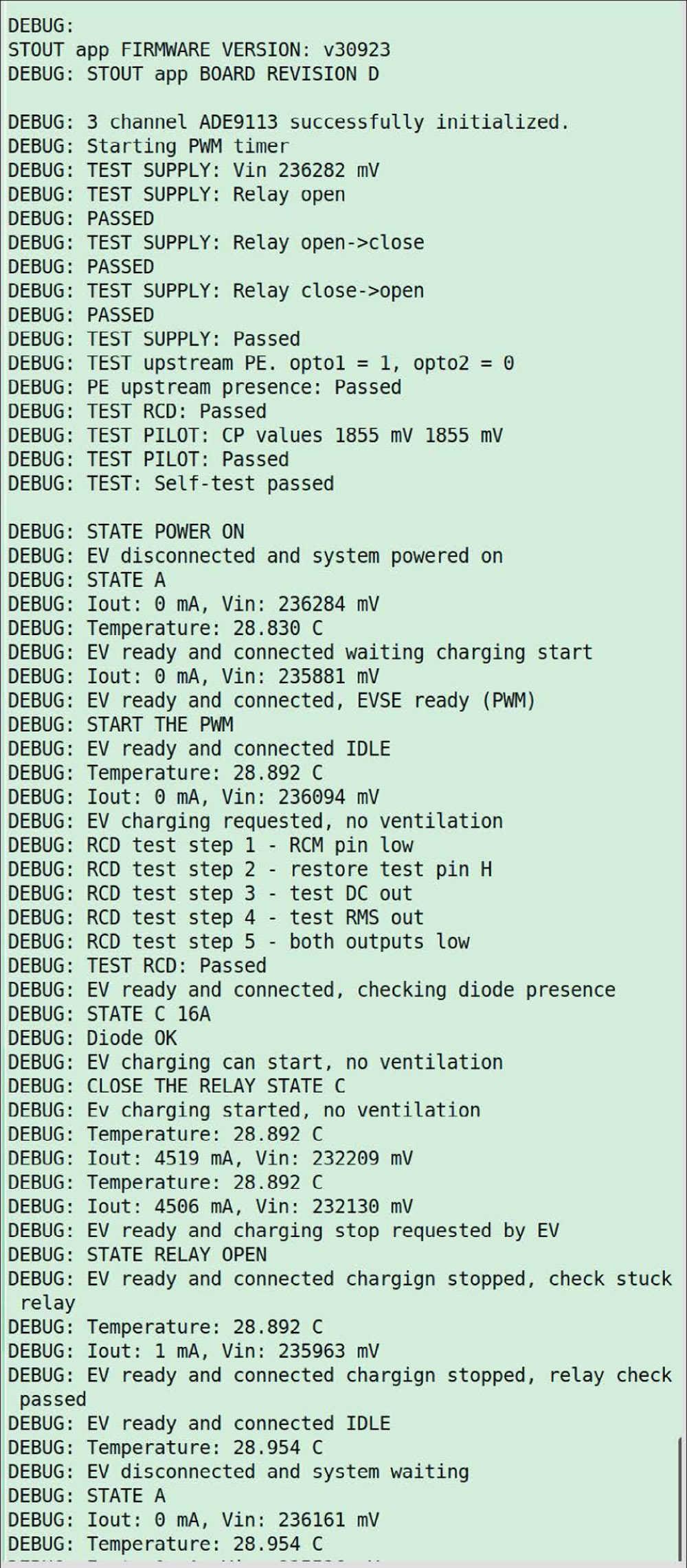
Rys. 11. Komunikaty debugowania otrzymane przez interfejs szeregowy dla pełnej sekwencji ładowania
Komunikaty debugowania zawierają również informacje o wartości napięcia wejściowego, prądzie i temperaturze wewnątrz obudowy oraz stanach aktywnych w danym momencie.
Błąd CP
W przypadku wystąpienia błędu CP układ IC-CPD rozłącza przekaźnik i sygnalizuje błąd CP za diodach LED.
Błąd uziemienia ochronnego (PE)
W przypadku wystąpienia błędu PE (brak uziemienia ochronnego między stacją ładowania EVSE a pojazdem elektrycznym EV) w stanie C, przekaźnik zostanie rozłączony, a błąd zostanie zasygnalizowany za pomocą diod LED. Jeśli błąd PE wystąpi w stanie A lub B, układ IC-CPD zinterpretuje to jako odłączenie pojazdu elektrycznego i pozostanie w stanie A lub przejdzie do niego (w zależności od stanu aktywnego w momencie wystąpienia błędu). W tej sytuacji poziom CP nie może osiągnąć wartości stanu C, a przekaźnik pozostanie otwarty do momentu przywrócenia połączenia PE.
Wnioski
Niniejszy artykuł skupia się na układach IC-CPD i zawiera informacje na temat projektu referencyjnego ADI AD-ACEVSECRDSET-SL, który jest kompletnym rozwiązaniem w postaci kabla ładującego EVSE Type 2 o mocy 3,6 kW, przeznaczonym do oceny i prototypowania systemów ładowania pojazdów elektrycznych. Liczba komponentów została zmniejszona przy zastosowaniu izolowanego przetwornika analogowo-cyfrowego ADE9113. Jest to możliwe dzięki technologii integrated isoPower i izolacji wewnętrznej. Mikrokontroler MAX32655 z wbudowanymi kanałami BLE i ADC sprawia, że wdrożenie maszyny stanów jest proste, zgodnie z normą IEC 61851-1. Użycie frameworka bez systemu operacyjnego oraz podejścia opartego na kodzie open source ułatwia tworzenie oprogramowania i stanowi dobry punkt wyjścia do opracowania oprogramowania zgodnego z wytycznymi zawartymi w odpowiednich normach IEC, o których jest mowa w artykule. Dostarczone schematy blokowe, komunikaty debugowania oraz walidacja projektu za pomocą FEV300 pomagają lepiej zrozumieć i ocenić cały projekt.
Więcej informacji na temat projektu referencyjnego można znaleźć na stronach:
- AD-ACEVSECRDSET-SL– Podręcznik użytkownika
- AD-ACEVSECRDSET-SL– Podręcznik użytkownika sprzętu
- AD-ACEVSECRDSET-SL– Podręcznik użytkownika oprogramowania
Bibliografia
1 Global EV Data Explorer. International Energy Agency.
2 Fayez Alanazi. “Electric Vehicles: Benefits, Challenges, and Potential Solutions for Widespread Adaptation.” Applied Sciences, Vol. 13, 2023.
3 Luis Sarmiento, Nicole Wägner, and Aleksandar Zaklan. “The Air Quality and Well-Being Effects of Low Emission Zones.” Journal of Public Economics, Vol. 227, 2023.
4 “Worldwide Daily Driving Distance is 25-50km? What about AU, US, UK, EU, and…” Solar on EV, October 2021.
5 “Daily Miles of Travel per Driver in the United States Between 2001 and 2017.” Statista, 2021.
6 National Household Travel Survey. U.S. Department of Transportation Federal Highway Administration.
ADI Type2 EVSE. GitHub.
no-OS API. Analog Devices, Inc.
no-OS Build Guide. GitHub.
no-OS Code Style Guidelines. GitHub.
no-OS GitHub Repository. GitHub.
no-OS Licence. GitHub.
no-OS Overview. Analog Devices, Inc.
Opracowanie: Jarosław Doliński
 Analog Devices otworzył nowy zakład produkcyjny układów scalonych w Tajlandii
Analog Devices otworzył nowy zakład produkcyjny układów scalonych w Tajlandii  Nowa konstrukcja przełączników Analog Devices pozwala zwiększyć gęstości kanałów na PCB
Nowa konstrukcja przełączników Analog Devices pozwala zwiększyć gęstości kanałów na PCB  Przełączniki przemysłowe Analog Devices uzyskały certyfikat zgodności CC-Link IE TSN
Przełączniki przemysłowe Analog Devices uzyskały certyfikat zgodności CC-Link IE TSN 


![Szymon Robak oprowadza po katowickim Laboratorium Badań Kompatybilności Elektromagnetycznej w Sieć Badawcza Łukasiewicz - Instytucie Sztucznej Inteligencji i Cyberbezpieczeństwa. Zapraszamy na film! [materiał redakcyjny]](https://mikrokontroler.pl/wp-content/uploads/2026/06/Szymon-Robak-tytulowe.png "https://www.youtube.com/watch?v=gHcP8AajoN4")
![Zapraszamy do obejrzenia filmu i wysłuchania krótkich wypowiedzi prelegentów Hardware Forum 2026 i organizatorów majowej konferencji dla inżynierów z branży elektronicznej: Konrad Bruliński z Lemontech, prof. Krzysztof Kulpa z Politechniki Warszawskiej, Zbigniew Huber z FLC, Ewa Załupska z firmy KROK, Jerzy Kozieł z MPTECH, Grzegorz Potyralski z VIGO Photonics, dr Krzysztof Czuba z Politechniki Warszawskiej, Anna Beata Kalisz Hedegaard z Quantum Security Defence, Adrian Cichosz z Elhurt Dystrybucja Anna Kamińska z Creotech Quantum, oraz Łukasz Jaeszke i Adam Jaeszke z TEK.day [materiał redakcyjny]](https://mikrokontroler.pl/wp-content/uploads/2026/05/tytulowe-film-1.png "https://www.youtube.com/watch?v=BgxJVTwYJ-s")
