Niekwestionowaną zaletą SMU 2461 jest bardzo duża szybkość próbkowania digitizera. W urządzeniu zastosowano dwa digitizery pracujące z szybkością 1 MSa/s. Takie rozwiązanie umożliwia jednoczesną bardzo dokładną obsługę sygnału napięciowego i prądowego. Jak wiadomo impedancja wejściowa przyrządu wykorzystywanego w trybie pomiaru napięcia powinna być jak największa, aby nie obciążać źródła. Zastosowane w SMU Keithley 2461 rozwiązania zapewniają uzyskanie tej impedancji na poziomie 10 GW, co istotnie redukuje błędy pomiarowe wynikające z rozpływu prądu do miernika i fizycznego obciążenia.

Wejścia i wyjścia SMU
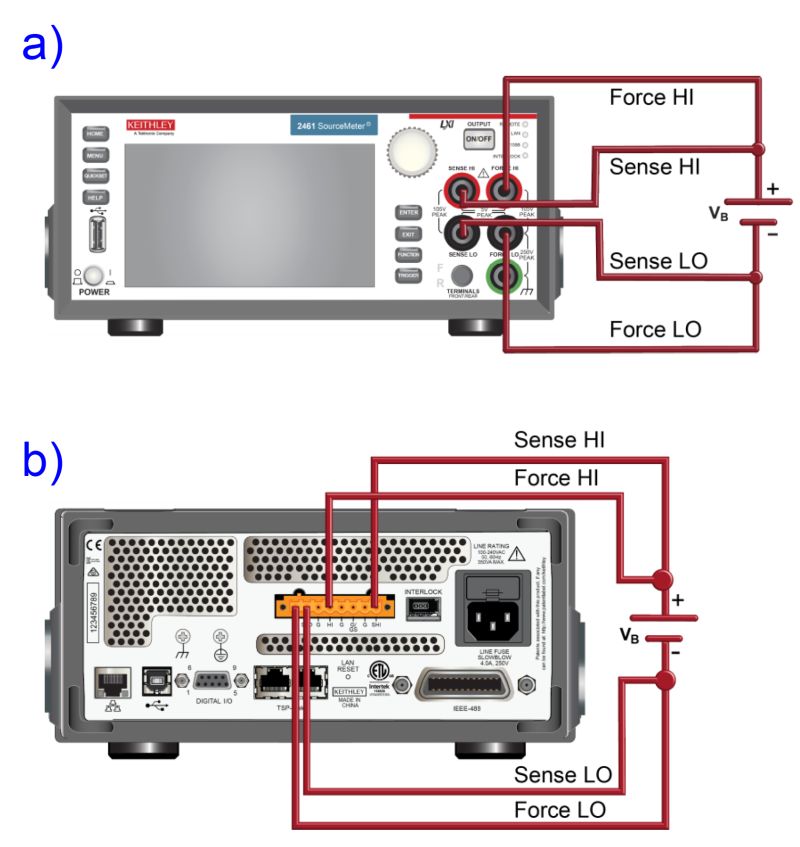
Potencjalnym źródłem błędów pomiarowych, szczególnie podczas pomiarów małych rezystancji lub dużych prądów, mogą być też niezerowe rezystancje kabli przyłączeniowych. W celu minimalizacji wpływu tego czynnika na ostateczny wynik, w technice pomiarowej stosowane jest tzw. połączenie kelwinowskie. Wyróżnia się w nim dwie pary przewodów oznaczanych jako „Sense” i „Force”. Odpowiednie gniazda przyłączeniowe wyprowadzono w SMU Keithley 2461 na płytę czołową (gniazda bananowe) i zdublowano na płycie tylnej (gniazda śrubowe) – rys. 3. Z połączeń 4-przewodowych korzysta się zarówno przy pomiarach źródeł, jak i odbiorników energii.
Sterowanie SMU
Jakkolwiek SMU Keithley 2461 jest w pełni autonomicznym przyrządem pomiarowym, może być wykorzystywany również w pomiarach zautomatyzowanych. Sterowanie jest wówczas realizowane za pośrednictwem jednego z wielu interfejsów komunikacyjnych: USB, GPI, LXI/Ethernet. Większość gniazd umieszczono na tylnej ścianie przyrządu. Jest tu też gniazdo wejść/wyjść cyfrowych (DSUB-9), za pośrednictwem którego mogą być doprowadzane m.in. sygnały wyzwalania zewnętrznego.
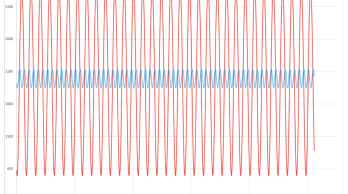
Automatyzacja pomiarów nie oznacza jednak konieczności dołączania SMU do urządzeń sterujących. Przełączanie trybów pracy i wykonywanie sekwencji pomiarów możliwe jest także po uruchomieniu odpowiednio opracowanego skryptu. Może być on przygotowany na przykład na komputerze, a następnie wgrany do pamięci SMU, z której jest uruchamiany. Keithley udostępnia użytkownikom poprzez swoją stronę internetową specjalne oprogramowanie Test Script Builder (TSB) służące do edycji skryptów. Przykładową sekwencję sterowania SMU wykorzystywaną w pomiarze paneli słonecznych przedstawiono na rys. 4.

Tryby pracy
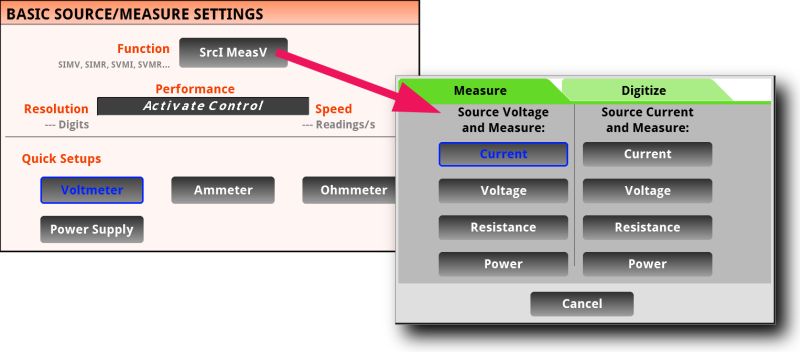
Jak już wiemy, zakres pracy SMU 2461 obejmuje wszystkie cztery ćwiartki charakterystyki prądowo-napięciowej. Oznacza to, że wyjście może mieć charakter źródła napięciowego lub prądowego, a układ pomiarowy może być ustawiony w tryb pomiaru prądu lub napięcia. Znając te dwa podstawowe parametry możliwe jest również obliczanie rezystancji i mocy. Szybkiego wyboru rodzaju pracy dokonuje się w oknie konfiguracyjnym „Basic Source/Measure Settings” (rys. 5), w którym po naciśnięciu przycisku ekranowego Function zostają wyświetlone wszystkie możliwe konfiguracje. Mamy więc wyjście napięciowe z pomiarem prądu, napięcia, rezystancji i mocy i analogiczne warianty dla wyjścia prądowego. (Napięcie i prąd wyjściowy można regulować ręcznie za pomocą pokrętła znajdującego się na płycie czołowej SMU, lub zmieniać programowo, np. przez skrypt lub komputer sterujący. Z kolei możliwość pomiarów tak statycznych, jak i dynamicznych jest szczególnie przydatna podczas badania źródeł zasilania, takich jak różnego rodzaju przetwornice, ogniwa słoneczne, baterie, akumulatory itp. Równie często są prowadzone pomiary rezystancji dynamicznej diod świecących lub elementów przełączających (np. tranzystorów MOSFET, tyrystorów itp.).