





Robot „Orangutan” – budowa krok po kroku
Zaczynamy!
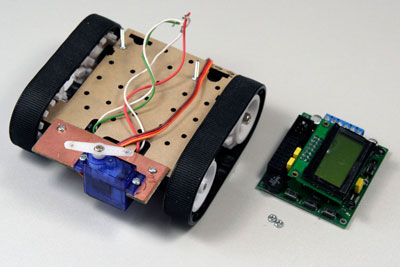
Po zgromadzeniu wszystkich potrzebnych materiałów, zainstalowaniu oprogramowania i znalezieniu paru wolnych godzin, przystępujemy do pracy.
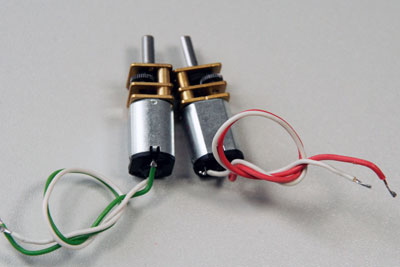
Przygotowujemy 4 odcinki kolorowych przewodów i lutujemy je parami do silników. Wolne końce „pobielamy” na długości ok. 5 mm. Przygotowane w ten sposób silniki montujemy w podwoziu.
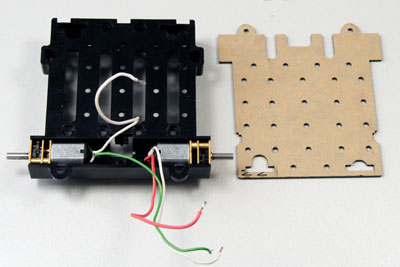
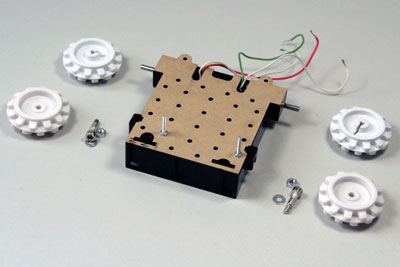
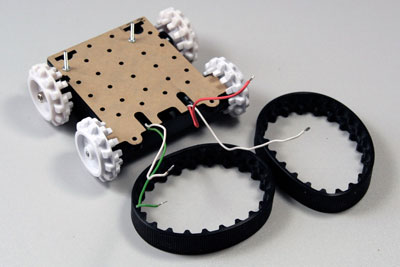
Łoże silników przykrywamy dopasowaną płytką i dokręcamy ją dwiema śrubami – będą to równocześnie śruby służące za uchwyt dla sterownika. Dwa koła z D-kształtnym otworem są przeznaczone do montażu bezpośrendio na osiach silników, dwa pozostałe należy zamontować na śrubach z zestawu. Aby móc je wkręcić, należy najpierw wsunąć nakrętki w specjalne „kieszenie” w podwoziu. Dopiero po czasie zauważyłem, że „kartonową” taśmę można z płytki zedrzeć i otrzymać gładką, czarną powierzchnię – wystarczy ostrożnie podważyć ją w rogu paznokciem.
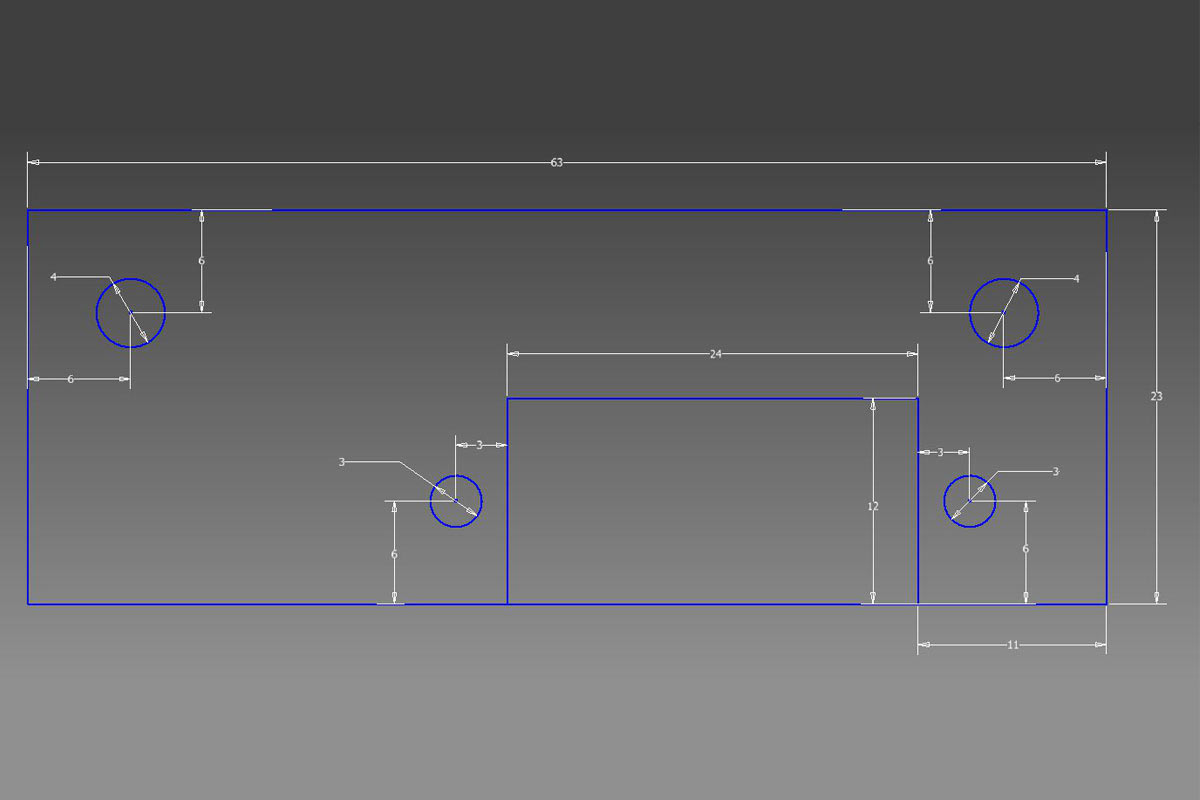
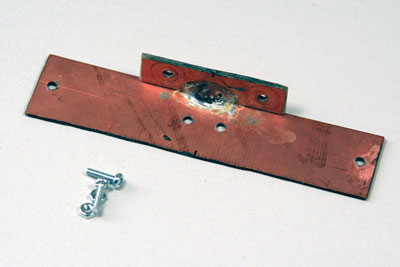
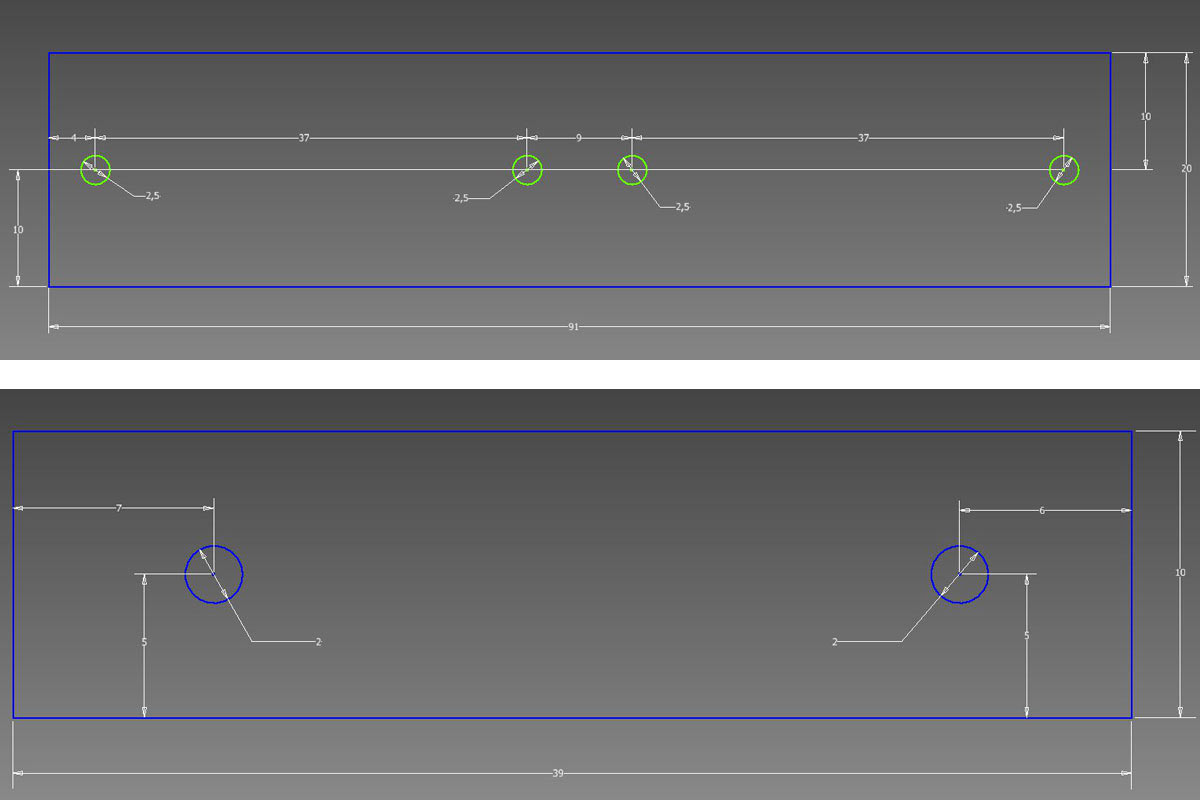
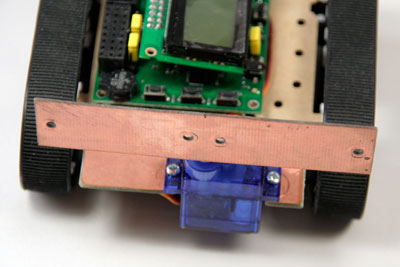
Wycinamy uchwyt na serwo, zgodnie z poniższym rysunkiem (zakładając oczywiście, że korzystamy z serwa SG90). Element można wykonać z dowolnego, odpowiednio sztywnego materiału – ja wykorzystałem fragment dwustronnego laminatu.
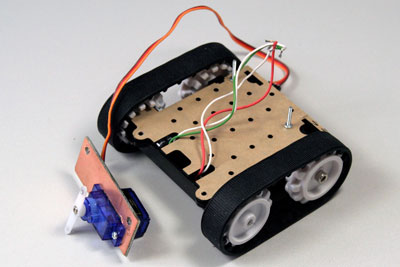
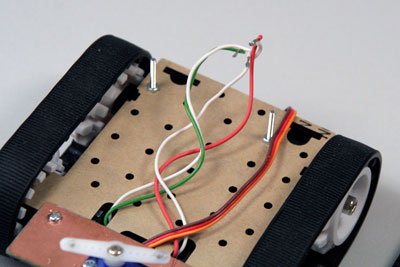
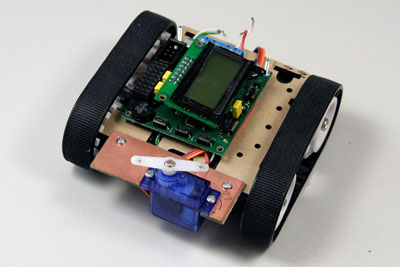
Montujemy serwo w uchwycie przy pomocy śrub. Sprawdzamy ręcznie zakres obrotu osi serwa, ustawiamy oś w pozycji neutralnej (w środku zakresu obrotu), zakładamy orczyk równolegle do korpusu i dokręcamy go śrubą. Na orczyku będzie umieszczona „głowa” robota, więc zależy nam na możliwości nieograniczonego ruchu „głowy” w lewo i prawo, w takim samym zakresie. Przed dokręceniem mocowania do podwozia, poprawiamy przewody tak, żeby biegły przez widoczne na zdjęciu wyżłobienia.
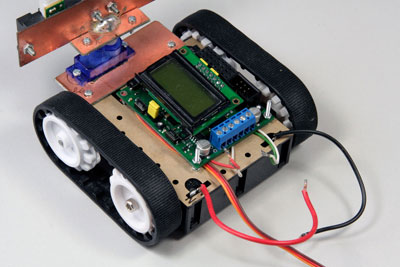
Wyciągamy sterownik Orangutan SV-328 z opakowania, zakładamy wyświetlacz LCD i odkręcamy śruby w niebieskich terminalach śrubowych. Przewody powinny biec pod sterownikiem, więc układamy je odpowiednio i dokręcamy płytkę sterownika dwiema nakrętkami.
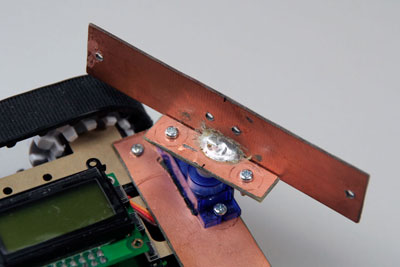
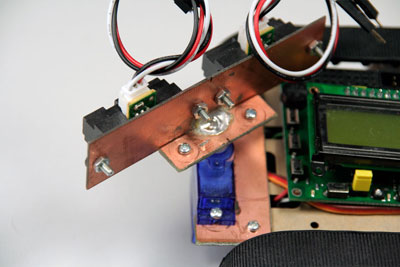
Wycinamy dwa kolejne elementy, tym razem przeznaczone do montażu dalmierzy. Powinny one być zmontowane prostopadle do siebie, można to osiągnąć wykonując wszystko np. z L-kształtnego profilu aluminiowego, klejąc dwa fragmenty lub lutując je – o ile zostały wykonane z laminatu pokrytego miedzią. Polecam ostatni sposób, jako najszybszy i najprostszy do wykonania.
Przygotowane w taki sposób mocowanie zakładamy na orczyk serwa. Być może otwory w orczyku będzie trzeba rozwiercić pod śruby, lub zamiast śrub można użyć np. kleju do klejenia na gorąco.
Skracamy przewód od dalmierzy i zmieniamy mu końcówki – powinny pasować do żeńskich gniazd typu goldpin (raster 2,54 mm). Można wykorzystać złącza BLS01, a do „blaszek” w złączu przylutować zwykłe goldpiny, pozbawione plastikowych fragmentów. Zamiast wykonania złącz, można też odizolować końcówki przewodów i pobielić je cyną na długości ok. 7 mm. Podłączamy przewody, a dalmierze przykręcamy do uchwytu na serwie. „Głowa” robota jest gotowa.
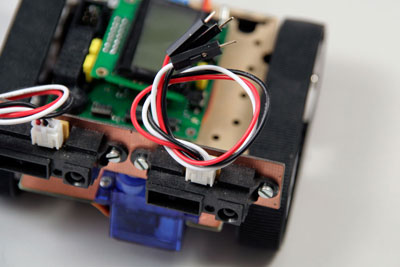
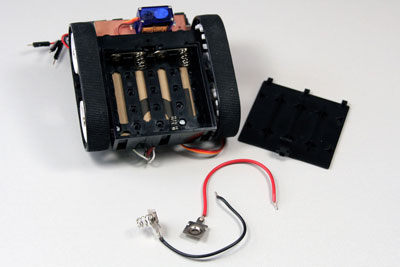
Ponownie rozgrzewamy lutownicę, musimy przlutować dwie „blaszki” z koszyka na baterie. Warto zachować kolory widoczne na zdjęciu – kolor czerwony to +5 V, czarny to GND. Gotowe przewody wyprowadzamy przez otwory z drugiej strony podwozia.
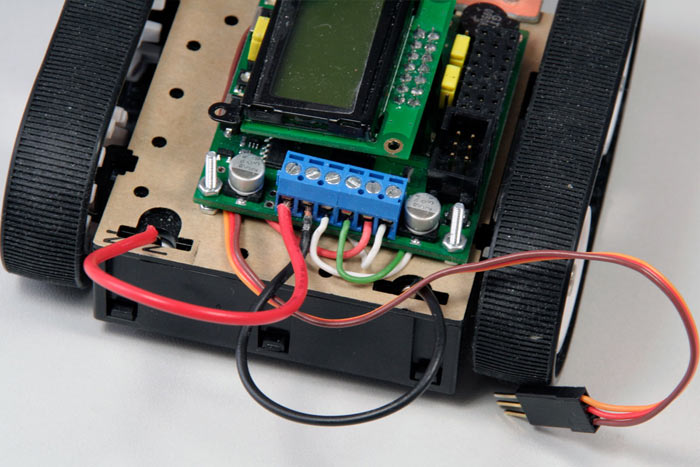
Bardzo istotne jest odpowiednie podłączenie przewodów do sterownika. Zasilanie i silniki podłączamy w sposób widoczny na poniższym zdjęciu i dokręcamy terminale śrubami. Jeśli zamieniliśmy bieguny zasilania silników, to (po uruchomieniu robota) mogą się one kręcić w przeciwnym do oczekiwanego kierunku. W takim wypadku wystarczy zamienić parę przewodów od danego silnika miejscami lub wprowadzić zmiany w programie.
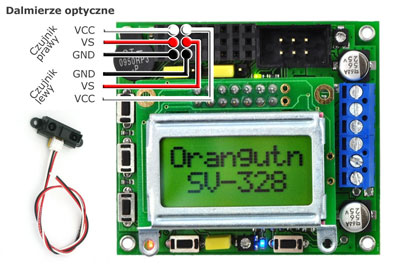
Pozostało jeszcze podłączyć serwo i oba dalmierze. Teoretycznie nie ma większego znaczenia, gdzie je podłączymy – wystarczy zmienić odpowiednie deklaracje w oprogramowaniu robota w zależności od wprowadzonych przez nas zmian. Ja polecam podłączyć wszystko według poniższego rysunku, a robot powinien zadziałać już od pierwszego uruchomienia.

Pozostało już tylko ułożyć przewody od dalmierzy tak, żeby „głowa” robota mogła swobodnie się obracać na boki i możemy przystąpić do programowania. Nie zapomnijmy o zasilaniu – 4 bateriach lub naładowanych akumulatorach AA.
 Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle
Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle  Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników
Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników  AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii
AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii 




