





[RADAR NA STM32] Demonstrator zjawiska Dopplera na zestawie STM32F429I-DISCOVERY
Schemat i zasada działania
Schemat wykorzystywanego układu przedstawiony jest na rysunku 7.
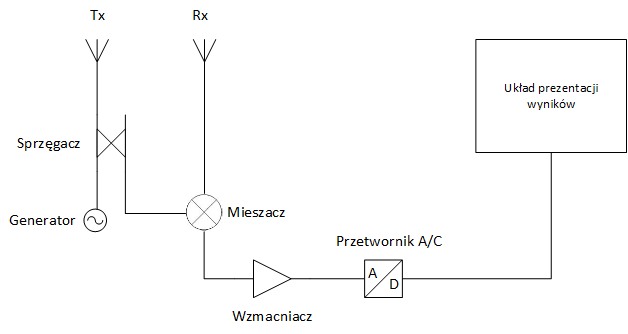
Rys. 7. Schemat testowanego urządzenia
Układ działa w sposób następujący: moduł HB-100 podłączony do zasilania działa cały czas, nadając i odbierając sygnał wysokiej częstotliwości. Odebrana fala jest konwertowana w pasmo niskiej częstotliwości, dzięki czemu może być próbkowana z względnie niską częstotliwością. Próbkowanie i analiza sygnału odbywa się po stronie mikrokontrolera. Sygnał analogowy podawany jest na pin PA0 procesora, odczyt jego wartości w formie cyfrowej. Tak przygotowany sygnał jest mnożony przez odpowiednie funkcje skalujące, umożliwiające dogodną obserwację sygnału na wyświetlaczu zestawu ewaluacyjnego. Dane składowane są w tablicy typu float. Z każdym odczytem następuje przesunięcie danych o jedną pozycję, co umożliwia wyświetlanie danych w formie przebiegu w dziedzinie czasu. Istotne jest, że funkcje skalujące mogą być dobierane w zależności od środowiska propagacyjnego. Dzięki temu użyteczność urządzenia jest większa.
Testy
Testy urządzenia w pierwszym podejściu były wykonywane z użyciem komputera, mikrokontrolera oraz modułu ze wzmacniaczem. Sygnał był próbkowany z użyciem zestawu STM32F429I-DISCO a dane przesyłane przez port szeregowy do komputera. Stworzono aplikację w LabView, która wyświetlała dane w dziedzinie czasu na wykresie w czasie rzeczywistym. Pozwoliło to określić czy układ jest sprawny i podjąć dalsze prace nad rozwojem oprogramowania.
Pierwszy prototyp urządzenia przedstawiono na fotografii 8. Moduł radarowy umieszczono na płytce prototypowej wraz ze wzmacniaczem. Płytkę połączono z zestawem ewaluacyjnym. Całość prezentuje się następująco.
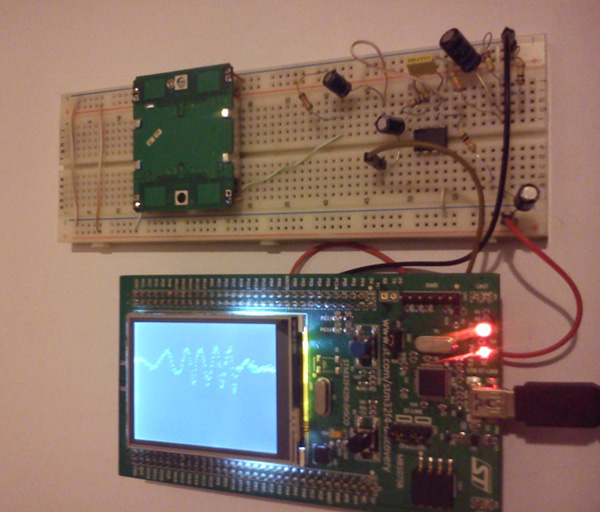
Fot. 8. Podłączony i kompletny układ
Tak podłączony układ przetestowano w laboratorium antenowym na Wydziale Elektroniki, Telekomunikacji i Informatyki na Politechnice Gdańskiej. Pomieszczenie jest przystosowane do pomiarów anten, dzięki czemu pozbyto się odbić i propagacji wielodrogowej sygnałów. Do testów wykorzystano reflektory radarowe, które ułatwiały odwzorowanie ruchu obiektu o względnie stałym RCS (Radar Cross Section). W celu pomiarów moduł został umieszczony w jednym końcu pomieszczenia, podczas gdy reflektory radarowe były poruszane na jego drugim końcu. Obserwowano stabilność układu i wiarygodność wyników.
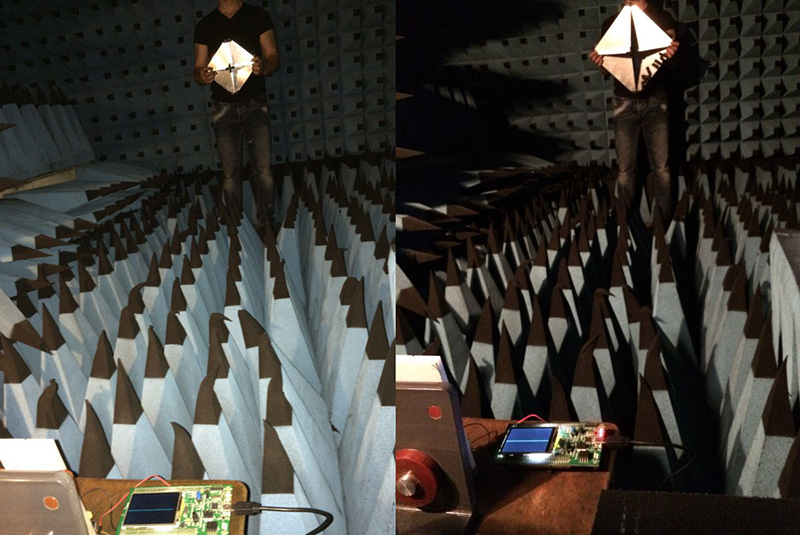
Fot. 9. Wykonywanie testów z reflektorem radarowym
Testy potwierdziły poprawne działanie urządzenia. Precyzyjna weryfikacja jest jednak niemożliwa, do czasu implementacji algorytmu FFT na mikrokontrolerze, co jest drugim etapem rozwoju projektu. Docelowo wyświetlacz powinien wyświetlać prążki odebranej częstotliwości, a oś pozioma powinna być wyskalowana w [m/s] lub [km/h]. Możliwe jest także zaimplementowanie prostych algorytmów CFAR (Constant False Alarm Rate), co ułatwi określanie progu detekcji, co z kolei da szansę na zaszycie pewnej logiki i algorytmów wykrywających zdefiniowane sytuacje.
Podsumowanie
W powyższym tekście zawarto krótki opis układu, będącego mikrofalowym demonstratorem zjawiska Dopplera. Zakończono pierwszą fazę rozwoju urządzenia i przedstawiono perspektywy dalszej rozbudowy. Zaprezentowano także metodologię testowania urządzenia. Opisany układ może znaleźć zastosowanie m.in. jako:
- sensor ruchu,
- prędkościomierz,
- sensor alarmowy,
- czujnik przesunięcia,
- czujnik poziomu cieczy/granulatów.
Rozwój oprogramowania może pozwolić na dużo bardziej zaawansowane projekty.
Literatura
[1] Z. Czekała, „Parada radarów”, Bellona, Warszawa 1999 [2] http://www.limpkin.fr/public/HB100/HB100_Microwave_Sensor_Application_Note.pdf [3] B.R. Mahafza „Radar signal analysis and processing using Matlab” Taylor & Francis Group, LLC, 2009 [4] B.R. Mahafza „Radar system analysis and processing using Matlab” CHAPMAN & HALL/CRC, 2000
 Grzegorz Kamiński: Dlaczego powstały tranzystory FinFET i GAAFET?
Grzegorz Kamiński: Dlaczego powstały tranzystory FinFET i GAAFET?  Google stawia na fuzję jądrową. AI potrzebuje coraz więcej energii
Google stawia na fuzję jądrową. AI potrzebuje coraz więcej energii  Fotowoltaika perowskitowa: od wydajności laboratoryjnej do masowej komercjalizacji
Fotowoltaika perowskitowa: od wydajności laboratoryjnej do masowej komercjalizacji 

![O konkursie organizowanym przez firmę TRUMPF Huettinger i polskie uczelnie techniczne opowiada Alicja Peresada i prof. Jacek Rąbkowski oraz kilkoro nagrodzonych dyplomantów: mgr inż. Jakub Dobosz, inż. Maja Zielińska, dr inż. Jakub Kołodziej, dr inż Weronika Hryniewska-Guzik i dr inż. Grzegorz Bartyzel. Zapraszamy do obejrzenia filmu! [materiał redakcyjny]](https://mikrokontroler.pl/wp-content/uploads/2026/07/TRUMPF-czolowka.png "https://www.youtube.com/watch?v=XkeyLmtLfxo")



