





[PRZYKŁADY] Nowe peryferia w mikrokontrolerach Microchipa, czyli jak ponownie polubić 8-bitowce [1]
Uwaga! Wszystkie odcinki artykułu są dostępne pod adresem.
Dominacja 32-bitowych mikrokontrolerów stała się już faktem. Umysłami konstruktorów zawładnęły 32-bitowe jednostki centralne, rozbudowane peryferia, olbrzymie (jak na układy embeded) pojemności pamięci programu i RAM. A jak ktoś chce zastosować mniejszy układ, to do małych obudów wkłada się okrojoną 32-bitową jednostkę z niższym taktowaniem, mniejszą pamięcią, uboższymi peryferiami i za niższą cenę.
Z jednej strony to dobrze, bo raz poznane architektura i narzędzia można stosować w bardzo wielu zastosowaniach. Jednak z drugiej strony wykreowany brak alternatyw w zmonopolizowanym rynku może wywołać stagnację. Microchip – firma z olbrzymim potencjałem, która od zawsze szła swoją drogą, czasami pod prąd ogólnym tendencjom, wymyśliła sposób na drugą młodość 8-bitowych mikrokontrolerów rodziny PIC16F. Pomysł był prosty tak jak to tylko możliwe: bierzemy prosty sprawdzony rdzeń i dodajemy specjalne, zaawansowane układy peryferyjne.
Pierwsze pytanie jakie się nasuwa: to jakie to są te zaawansowane układy peryferyjne, że konstruktor rozważy wykorzystanie staruszka PIC16F zamiast na przykład nowoczesnego Cortex-M? Spróbuję odpowiedzieć na to pytanie w tym artykule.
PIC16LF1507 i MPLAB X Code Configurator
Nic tak dobrze nie ilustruje możliwości mikrokontrolera i jego układów peryferyjnych jak konkretne przykłady. Dlatego postanowiłem do ilustracji mojej tezy wykorzystać leżący w mojej szufladzie układ PIC16LF1507. Mikrokontroler ten został zbudowany zgodnie z wyżej przedstawiona ideą: do rdzenia PIC16F dołączono kilka bardzo interesujących układów peryferyjnych, które trudno jest spotkać w układach innych producentów. Mikrokontroler został umieszczony w podstawce na małej uniwersalnej płytce drukowanej (fotografia 1). Na płytce oprócz podstawki umieściłem złącze do podłączenia programatora debuggera PICKit3 i całość zasiliłem z napięcia +3,3V. Tu uwaga – większość mikrokontrolerów PIC16LF potrafi pracować z napięciem zasilania +5V. Niestety maksymalne napięcie zasilające PIC16LF1507 na wartość +4V i układ najlepiej zasilić napięciem +3,3V, bo przy +5V może się uszkodzić.
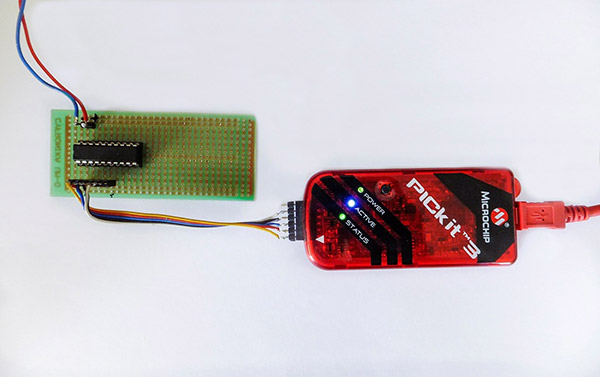
Fot. 1. Widok układu testowego
Do testów wykorzystamy standardowe, bezpłatne środowisko projektowe MPLAB X IDE, kompilator C MPLAB XC8 w wersji bezpłatnej bez optymalizacji kodu. Do programowania pamięci został zastosowany firmowy programator/debuger PICkit3.
Pakiet IDE MPLAB X ma możliwość uruchamiania wtyczek (plug-in). Jedną z takich wtyczek jest firmowy MPALB Code Configurator. Jest to jedno ze stosunkowo prostych narzędzi, które bardzo ułatwiają życie programistom. Jak wiadomo układy peryferyjne są konfigurowane i sterowane przez zapisywanie i odczytywanie rejestrów konfiguracyjnych umieszczonych w przestrzenia pamięci RAM. Im bardziej rozbudowany układ, tym więcej rejestrów. A więcej rejestrów oznacza więcej wysiłku potrzebnego do prawidłowego zaprogramowania. Programowanie rejestrów konfiguracyjnych to żmudna i niezbyt lubiana praca, ale od jej prawidłowego wykonania zależy poprawne działanie aplikacji. Code Configurator znakomicie pomaga w kompletnym skonfigurowaniu układów peryferyjnych mikrokontrolera. Oczywiście skonfigurowany układ trzeba potem programowo obsługiwać, ale to już zadanie dla programisty.
Najpierw pokażę, jak wykorzystać Code Configurator do skonfigurowania układu taktowania i zaprogramowania bezpieczników (fuse).
Konfigurator uruchamiamy z okna Tools -> Embeded (wcześniej musi zostać pobrany i zainstalowany). Po uruchomieniu z lewej strony ekranu MPLAB X IDE pojawi się okno MPLAB Code Configurator Resources podzielone na 2 części:
- Device Resources – PIC16LF1507 (rysunek 2),
- Project Resources.
W oknie Device Resources umieszczono listę symboli graficznych wszystkich układów peryferyjnych mikrokontrolera, a w oknie Project Resources układy peryferyjne wybrane z listy do konfigurowania.
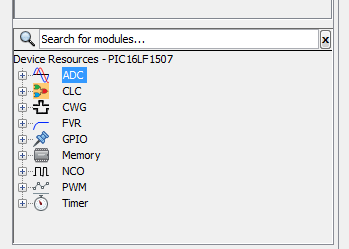
Rys. 2. Okno Device Resources wtyczki Code Configurator
Konfiguracja taktowania mikrokontrolera
Taktowanie mikrokontrolera jest konfigurowane z zasobu System. Po kliknięci na ikonę System w okienku Project Resources pojawi się okienko Clock do ustawiania źródła oraz częstotliwości taktowania, a także okno do konfigurowania bitów konfiguracyjnych mikrokontrolera Generate Configuration Bits (fuse). W pierwszym kroku ustawiamy taktowanie mikrokontrolera. Standardowo jednostka może być taktowana przez wewnętrzny oscylator RC , lub przez zewnętrzny przebieg taktujący z osobnego oscylatora (rysunek 3). Co ciekawe producent nie przewidział taktowania z wewnętrznego oscylatora kwarcowego. Za to taktowanie z wewnętrznego HFINOSC oscylatora daje możliwość wyboru wielu częstotliwości z zakresu od 31kHz do 16MHz.
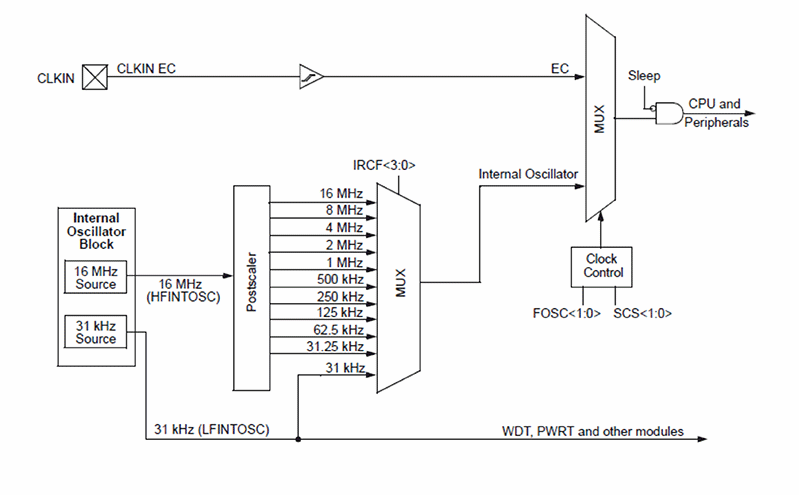
Rys. 3. Schemat systemu taktowania mikrokontrolera PIC16LF1507
 Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników
Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników  AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii
AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii  Mieszacze aktywne – ćwiczenie z serii ADALM
Mieszacze aktywne – ćwiczenie z serii ADALM 






