





[PROJEKT] Romi Chassis – montaż oraz sterowanie silnikami
Każdy silnik będzie sterowany za pomocą sterownika DRV8838. Jest to jednokanałowy sterownik silników prądu stałego. Pozwala on na sterowanie kierunkiem oraz prędkością obrotu silnika prądu stałego, który pobiera do 1,7 A (chwilowy pobór maksymalny 1,8 A). Sterownik może dostarczać napięcie do silnika z zakresu 0…11 V. Sam układ do poprawnego działania wymaga zasilania z zakresu 1,8…7 V. My nie musimy się tym martwić, ponieważ na płycie zasilającej znalazł się odpowiedni stabilizator, który zapewni napięcie do poprawnej pracy układu DRV8838. Sterowanie pracą silnika prądu stałego za pomocą układu DRV8838 jest bardzo łatwe. Na płycie zostały wyprowadzone złącza pokazane na rysunku 7.
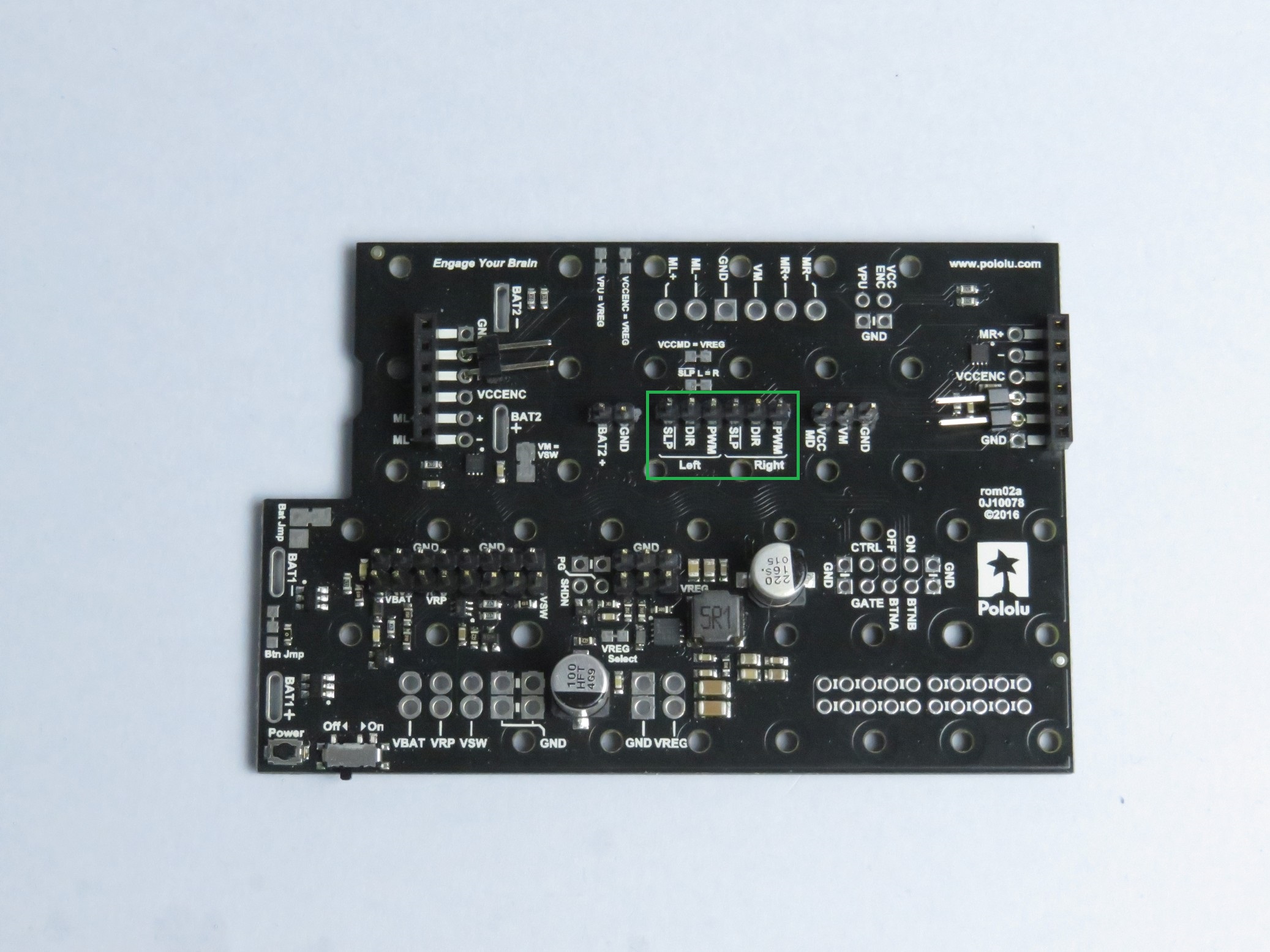
Rysunek 7. Wyprowadzenia sterowników silników
Na płytce PCB zostały wyprowadzone sygnały DIR, PWM, SLEEP dla każdego ze sterowników DRV8838. Sygnałem na pinie DIR określamy kierunek obrotów naszego silnika – podanie na ten pin stanu niskiego (0) spowoduje obrót silnika do przodu, natomiast podanie stanu wysokiego (1) spowoduje, że silnik będzie się obracał do tyłu. Aby sterować prędkością obrotów naszego silnia, do pinu PWM musimy podać sygnał o odpowiedniej szerokości impulsu (PWM). Im większe będzie wypełnienie sygnału PWM podane na ten pin, tym szybciej będzie obracał się nasz silnik. Za pomocą pinu SLEEP możemy wprowadzić układ w stan niskiego poboru prądu – domyślnie jest on podciągnięty do napięcia 5 V poprzez rezystor 10 kΩ. Czyli domyślnie ten tryb jest wyłączony.
Tabela 1. Tryby pracy sterownika DRV8838
| Pin KAMduino | Pin płyty podwozia |
| 5 V | VREG |
| GND | GND |
| 6 | DIR-Left |
| 7 | DIR-Right |
| 10 | PWM-Left |
| 11 | PWM-Right |
Teraz przyszedł czas na podłączenie modułu zasilania i sterowników silników do płytki KAmduino UNO zgodnie z tabelą 2.
Tabela 2.
| Pin KAMduino | Pin płyty podwozia |
| 5 V | VREG |
| GND | GND |
| 6 | DIR-Left |
| 7 | DIR-Right |
| 10 | PWM-Left |
| 11 | PWM-Right |
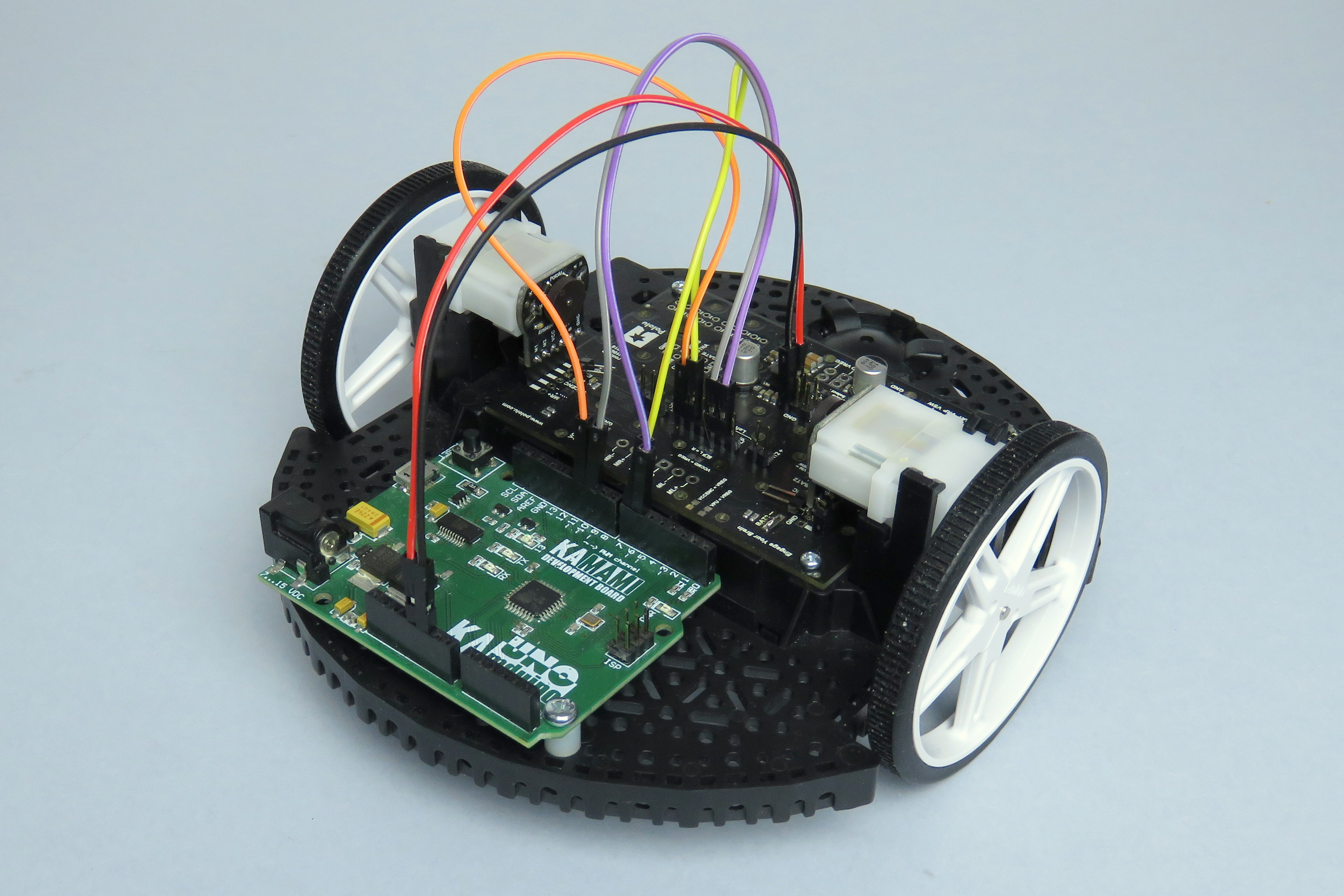
Po podłączeniu zgodnie z tabelą podwozie Romi Chassis prezentuje się jak na rysunku 8.
 Fotowoltaika perowskitowa: od wydajności laboratoryjnej do masowej komercjalizacji
Fotowoltaika perowskitowa: od wydajności laboratoryjnej do masowej komercjalizacji  Czy kamery termowizyjne pokazują nam całą prawdę?
Czy kamery termowizyjne pokazują nam całą prawdę?  Generowanie ujemnego napięcia odniesienia – eksperymenty z zestawem ADALM2000
Generowanie ujemnego napięcia odniesienia – eksperymenty z zestawem ADALM2000 

![O konkursie organizowanym przez firmę TRUMPF Huettinger i polskie uczelnie techniczne opowiada Alicja Peresada i prof. Jacek Rąbkowski oraz kilkoro nagrodzonych dyplomantów: mgr inż. Jakub Dobosz, inż. Maja Zielińska, dr inż. Jakub Kołodziej, dr inż Weronika Hryniewska-Guzik i dr inż. Grzegorz Bartyzel. Zapraszamy do obejrzenia filmu! [materiał redakcyjny]](https://mikrokontroler.pl/wp-content/uploads/2026/07/TRUMPF-czolowka.png "https://www.youtube.com/watch?v=XkeyLmtLfxo")



