





[PROJEKT] Romi Chassis – sterowanie za pomocą smartfona
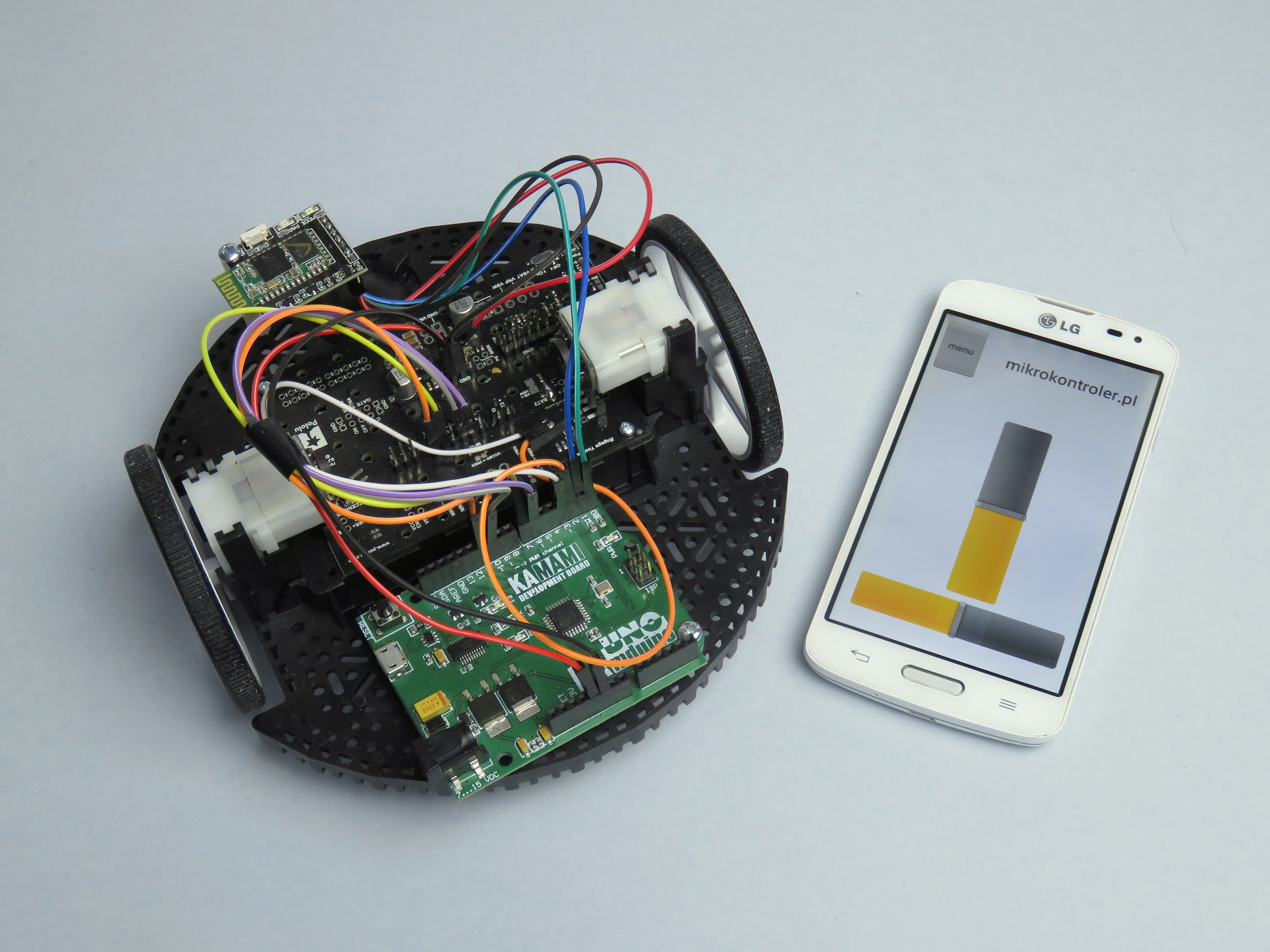
W projekcie zrealizowano proste sterowanie podwoziem Romi Chassis za pomocą smartfona z systemem Android. Do tego celu wykorzystano aplikację RoboRemo. Za jej pomocą w łatwy i szybki sposób można zaprojektować prostą aplikację, która pozwoli na sterowanie podwoziem.
Do realizacji projektu potrzebne są następujące komponenty:
- Podwozie Romi Chassis czarne lub czerwone
- Moduł zasilania wraz z sterownikiem silników dla podwozia Romi Chassis
- KAmduino Uno
- Moduł KAmodBT-HC05
- 6 baterii AA
- Przewody męsko-żeńskie oraz żeńsko-żeńskie
W projekcie wykorzystano podwozie Romi Chasiss, na którym znajduje się moduł zasilania wraz ze sterownikiem silników oraz moduł KAmduino.
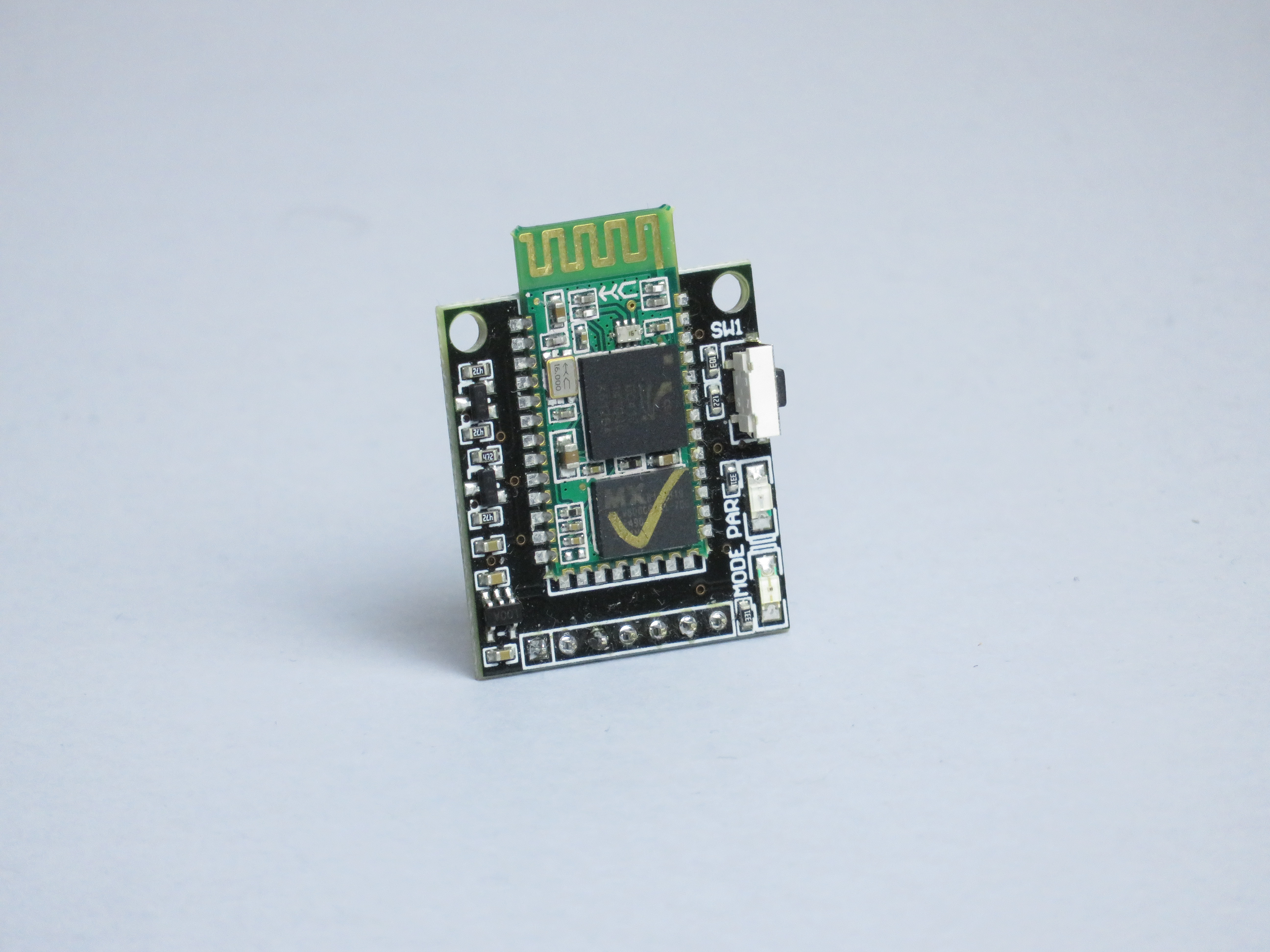
Rysunek 1. Moduł Bluetooth – KAmodBT-HC05
Pierwszym krokiem jest podłączenie modułu Bluetooth (KAmodBT-HC05) do KAmduino UNO. Moduł ten oparty został na układzie HC-05, który jest zgodny z standardem Bluetooth 2.0. Układ może pracować w dwóch trybach – Master albo Slave. Do zasilania wymaga napięcia 3,3 V. Również wyprowadzenia jako stan wysoki tolerują napięcie 3,3 V, jednak na płytce modułu znalazły się konwertery stanów logicznych, dzięki którym możemy bezpiecznie podłączyć go do naszego KAmduino UNO (które pracuje na napięciu 5 V). Komunikacja z modułem odbywa się za pomocą interfejsu UART. Modyfikacja parametrów transmisji (prędkość transmisji, ilość bitów danych, nazwę modułu itp.) jest realizowana za pomocą komend AT. Aby była możliwa komunikacja KAmdruino UNO <> Bluetooth należy podłączyć dwa sygnały TX i RX modułu Bluetooth do KAmdruino UNO. Przewody należy skrosować – sygnał TX modułu Bluetooth podłączyć do pinu RX (pin 1) KAmduino UNO, natomiast sygnał RX modułu Bluetooth należy podłączyć do pinu TX (pin 0) płytki. Aby zasilić moduł KAmodBT-05 podłączono go do płyty zasilającej z sterownikiem silników (VREG oraz GND). Podłączenie zostało również przedstawione w poniższej tabeli:
| Pin KAMduino | Pin modułu Bluetooth |
| 0 – RX | TxD |
| 1 – TX | RxD |
| VREG | +V |
| GND | GND |
Następnie należy przymocować moduł Bluetooth do podwozia Romi Chassis. Do tego celu wykorzystano śrubę M3 o długości 40 mm i dwa nylonowe dystanse 20 mm. Moduł zamontowany do podwozia prezentuje się następująco:
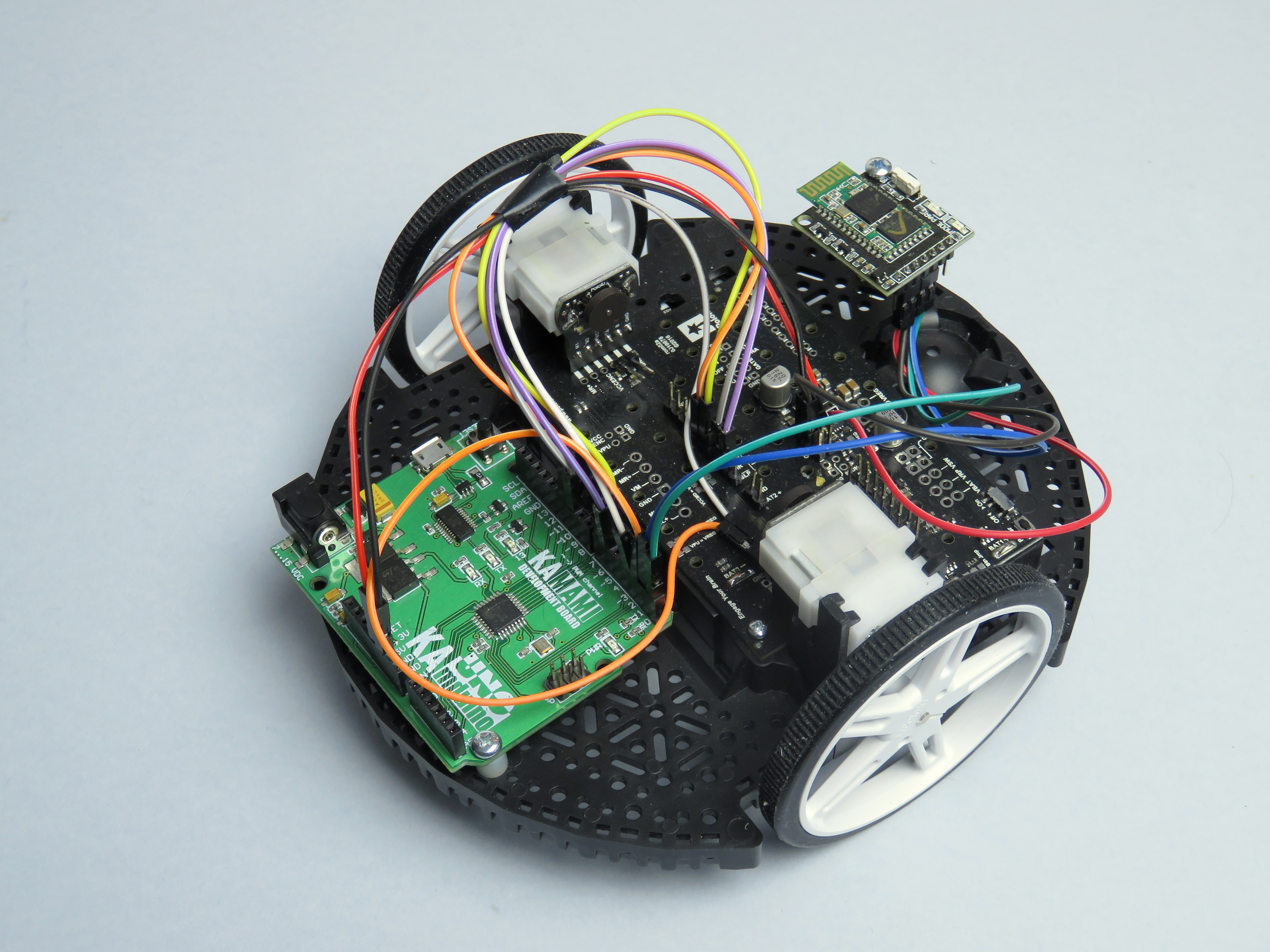
Rysunek 2. Zamontowany moduł KAmodBT-HC05 na podwoziu Romi Chassis
Teraz należy przygotować aplikację na smartfona sterującą ruchem podwozia Romi Chassis. Do jej stworzenia wykorzystano darmowy program RoboRemo, który pozwala tworzyć proste aplikacje przy pomocy interfejsu graficznego (bez pisania kodu aplikacji). Pierwszym krokiem będzie pobranie aplikacji – LINK.
Teraz należy przygotować aplikację na smartfona. Będzie ona zawierała 4 przyciski odpowiedzialne za jazdę do przodu, jazdę do tyłu, obrót w prawo oraz obrót w lewo.
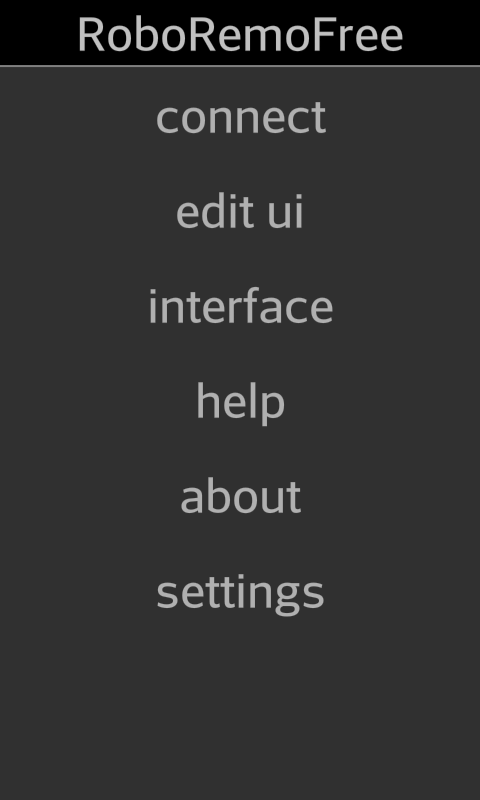
Po uruchomieniu aplikacji (rysunek 3) można przejść do trybu edycji interfejsu. W tym celu w menu (przycisk w lewym górnym rogu) trzeba wybrać opcję edit ui.
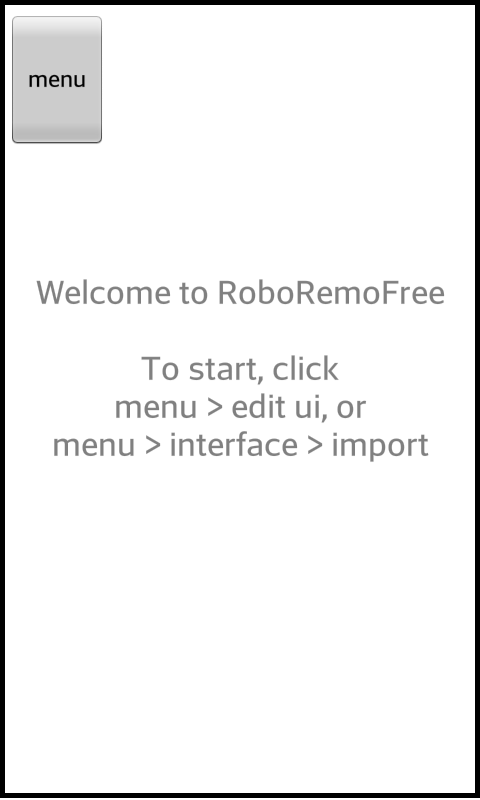
Rysunek 3. Okno programu RoboRemo
Rysunek 4. Menu programu RoboRemo
W trybie edycji kolor tła zmienia się na szary. Teraz można dodać przyciski. Aby to to zrobić należy wybrać dowolną cześć ekranu, a następnie z listy pozycję button.
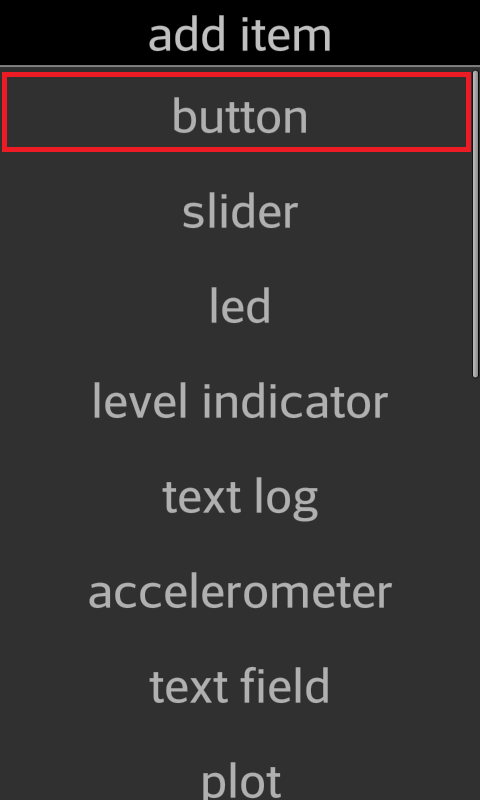
Rysunek 5. Wybór elementu do dodania
Należy dodać 4 takie przyciski. Przy dodanym elemencie pojawią się informacje. Aby przenieść element trzeba „chwycić” za jego górny lewy róg, natomiast zmiana rozmiaru odbywa się poprzez chwycenie za prawy dolny róg elementu. Elementy można kopiować. W tym celu należy wybrać element, opcję copy, a następnie po kliknięciu w dowolnym miejscu, w menu wybrać opcje paste.
Ekran po dodaniu 4 przycisków wygląda następująco:
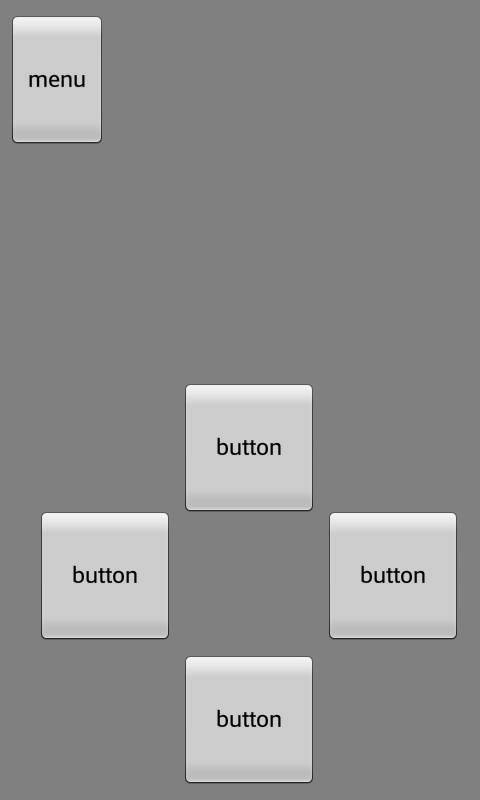
Rysunek 6. Interfejs z 4 przyciskami
Aby aplikacja prezentowała się lepiej można zmienić tekst na przyciskach, np. zastąpić je strzałkami (jak na rysunku). Aby to zrobić trzeba kliknąć na przycisk i wybrać opcję set text. Do zmiany wielkości wyświetlanego tekstu służy opcja set text size.
Po modyfikacjach przyciski wyglądają następująco:
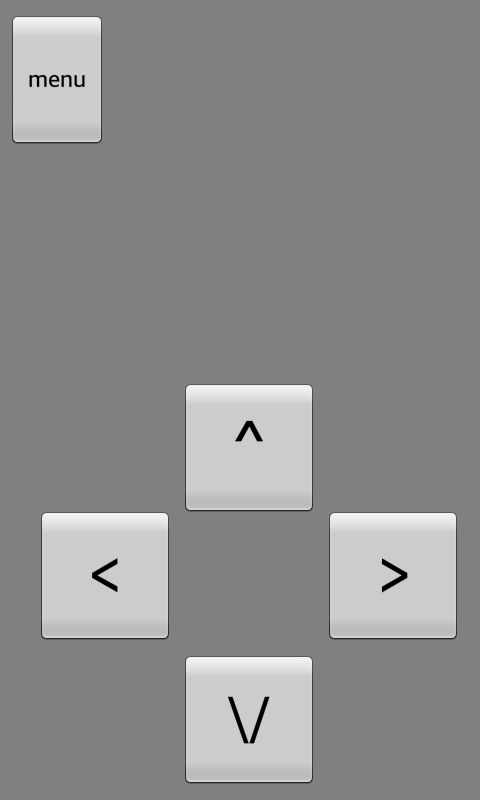
Rysunek 7. Interfejs z 4 przyciskami z odpowiednimi nazwami
Następnie trzeba przypisać przyciskom odpowiednie komendy, które będą wysyłane w momencie naciśnięcia. Aby to uczynić, po kliknięciu na przycisk wybieramy opcję set press action. Dla jazdy do góry (przycisk na samej górze, z strzałką w do góry) będzie wysyłana litera „F” (od ang. Forward – naprzód). Wybór akceptujemy przyciskiem ok. Teraz należy wybrać opcje set release action. Będzie ona aktywowana gdy dany przycisk zostanie puszczony. Po zwolnieniu przycisku, podwozie powinno się zatrzymać, dlatego będzie wysyłana litera 'S’ (od Stop). Analogicznie robimy dla pozostałych przycisków – dla prawego wybieramy literę 'R’ (ang Right- prawo), dla lewego literę 'L’ (ang. Left – lewo) oraz dla dolnego przycisku literę 'B’ (ang. Back – do tyłu).
Tworzenie aplikacji zostało pokazane na poniższym materiale wideo:
 Fotowoltaika perowskitowa: od wydajności laboratoryjnej do masowej komercjalizacji
Fotowoltaika perowskitowa: od wydajności laboratoryjnej do masowej komercjalizacji  Czy kamery termowizyjne pokazują nam całą prawdę?
Czy kamery termowizyjne pokazują nam całą prawdę?  Generowanie ujemnego napięcia odniesienia – eksperymenty z zestawem ADALM2000
Generowanie ujemnego napięcia odniesienia – eksperymenty z zestawem ADALM2000 

![O konkursie organizowanym przez firmę TRUMPF Huettinger i polskie uczelnie techniczne opowiada Alicja Peresada i prof. Jacek Rąbkowski oraz kilkoro nagrodzonych dyplomantów: mgr inż. Jakub Dobosz, inż. Maja Zielińska, dr inż. Jakub Kołodziej, dr inż Weronika Hryniewska-Guzik i dr inż. Grzegorz Bartyzel. Zapraszamy do obejrzenia filmu! [materiał redakcyjny]](https://mikrokontroler.pl/wp-content/uploads/2026/07/TRUMPF-czolowka.png "https://www.youtube.com/watch?v=XkeyLmtLfxo")



